
株式会社デンソーウェーブにより出願された特許
141 - 150 / 1,155
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間に基づく第1評価指標を設定し、その第1評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
ロボットの制御方法およびロボットの制御装置

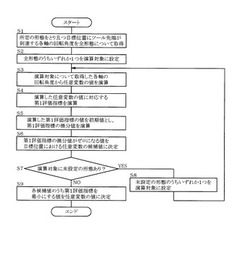
【課題】動作時間を引き延ばすことなく、PTP動作を行う際に消費するエネルギーを低減する。
【解決手段】ロボットをPTP制御する際、各軸単位での動作時間が最も短くなるように各軸を駆動するための速度指令を演算する演算処理を実行し、それら演算された各速度指令を実行するタイミングを決定するタイミング決定処理を実行する。タイミング決定処理では、動作時間が最も長い速度指令から順に、その次に動作時間の長い速度指令との間において互いに減速動作が行われない減速余白期間が存在するか否かを判断し、減速余白期間が存在する場合且つその減速余白期間内に収まる減速期間を持つ速度指令が存在する場合、その速度指令における減速期間が減速余白期間内に収まるように、その速度指令を実行するタイミングを決定する。これにより、全体の動作時間を従来と同等にした上で、各速度指令における減速期間が分散化される。
(もっと読む)
光学的情報読取装置
【課題】ローリングシャッタ方式を用いて撮像された二次元コードのずれを好適に補正し得る光学的情報読取装置を提供する。
【解決手段】検出されたコード領域の外形形状の外縁を構成する四辺のうち、先に取り込まれる一辺が、基準辺Loとされる。そして、上記基準辺Loに隣接する行のセル領域を基準に、このセル領域に反基準辺側から隣接するセル領域について、コード領域に占める領域を予測してこの予測された領域から当該セル領域が黒色セルおよび白色セルのいずれに相当するかを推定するとともに、他の行のセル領域について、基準辺側から隣接するセル領域を基準に、コード領域に占める領域を予測してこの予測された領域から当該セル領域が黒色セルおよび白色セルのいずれに相当するかを、基準辺Loに近い行のセル領域から順に推定することで、コード領域が補正される。
(もっと読む)
プログラマブルコントローラの入出力モジュール
【課題】入出力制御部に接続されている回路の種類を自律的に判別して外部装置との信号の入出力を行うことができる入出力モジュールを提供する。
【解決手段】 C_I/O制御部6の入出力判別部は、電源投入時に、出力端子A及び入出力端子Bそれぞれのレベルがハイ,ローとなるように信号を出力すると、その時の入力端子Cのレベルを読み込んで第1レベルとして記憶し、次に出力端子A及び入出力端子Bそれぞれのレベルを反転させて信号を出力すると、その時の入力端子Cのレベルを読み込んで第2レベルとして記憶する。そして、第1,第2レベルが示す組み合わせに応じて、自身に接続されているのが、I/Oユニット8(A〜C)の何れであるか、或いは何も接続されていない状態かを判別する。
(もっと読む)
生産機器システム、及びそのコンポーネント
【課題】生産機器システムにおいて、複数の駆動ユニット対して、簡単な処理により短時間で識別コードを設定する。
【解決手段】ロボットシステム10は、コマンドデータ内に含まれるIDを設定させるID設定コマンドを送信するコントローラ20と、ID設定コマンドを受信した場合に、それに含まれるIDを自己のIDとして設定する複数の回転軸ユニット40とを備える。ロボットシステム10は、上流側からID設定コマンドを受信した場合に、それに含まれるIDをインクリメントしてID設定コマンドを下流側へ送信する複数のインクリメント機50と、複数のインクリメント機50をコントローラ20に直列に接続するとともに、インクリメント機50同士を接続する内部通信回線61に回転軸ユニット40がそれぞれ接続された通信回線とを備える。
(もっと読む)
ロボット制御装置およびキャリブレーション方法
【課題】ロボットの関節軸を動作限界位置でキャリブレーションできない場合においても、限られた空間の中で精度良くキャリブレーションすることが可能な技術を提供する。
【解決手段】ロボット制御装置200は、ロボット本体の関節軸上の任意のキャリブレーション位置に関節軸が移動された場合において、アブソリュートエンコーダから位置情報を取得し、取得した位置情報に含まれる一回転内位置が、多回転位置をカウントする基準となる原点を含まない所定の許容範囲に含まれるか否かを判定する。そして、一回転内位置が、許容範囲に含まれない場合には、一回転内位置が許容範囲に含まれるまで、キャリブレーション位置の移動を要求し、一回転内位置が許容範囲に含まれる場合には、取得した位置情報と関節軸の制御位置とに基づいて、関節軸の位置を補正するための補正値を決定する。
(もっと読む)
RFIDタグ
【課題】蓋体の装着間違いを防止できてIDの不一致を防止でき、しかも、全体のコンパクトさを維持でき、さらに電池交換作業も容易とする。
【解決手段】連結部材23を、弾性変形可能な薄肉な短冊状の連結部材から構成し、この連結部材23の一端部23iがケース本体3のコーナー部3cの内面に連結され、蓋体4が開口6fを閉塞する状態において、連結部材23の一端部23iから他端部23t方向へ延びる途中部が、一方の側板部3iの内面に沿って立ち上がりつつ蓋体4の裏面近くにおいてケース本体3の一方の側板部3iとは反対の他方の側板部方向3tへ湾曲し、且つ連結部材23の他端部23tが、蓋体4の裏面のうち蓋体4の中心よりは他方の側板部3t方向に寄った部分で当該蓋体4に連結される構成とした。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】動作時間を引き延ばすことなく、PTP動作を行う際に消費するエネルギーを低減する。
【解決手段】ロボットをPTP制御する際、各軸単位での動作時間が最も短くなるように各軸を駆動するための速度指令を演算する演算処理を実行し、それら演算された各速度指令を実行するタイミングを決定するタイミング決定処理を実行する。タイミング決定処理では、動作時間の長い速度指令から順に基準パターンに設定し、その基準パターンの減速が開始されるまでに、その次に動作時間の長い速度指令である比較パターンの減速が終了可能であるか否かが判断される。その判断の結果、基準パターンの減速開始までに比較パターンの減速が終了可能である場合、比較パターンの動作終了時点が基準パターンの減速開始時点に一致するように比較パターンを実行するタイミングを決定する。
(もっと読む)
光学的情報読取装置
【課題】読取対象物に複数並べて形成された情報コードを読み取ることが可能な光学的情報読取装置において、読み取り作業をより効率的に行うことができ、作業者の操作負担を効果的に低減し得る構成を提供する。
【解決手段】ケース2の読取口4側に取り付けられた車輪40と読取対象物Rとの接触が維持された状態で、ケース2の移動によって車輪40が回転するようになっている。そして、制御部10は、回転検知結果に基づいて読取対象物Rに、複数並べて形成されたバーコードBの読み取りタイミングを制御するように構成されている。
(もっと読む)
ロボット
【課題】ロボットにおいて、エンコーダデータを確実に保持しつつバックアップ用電池の交換作業の容易化を図る。
【解決手段】ロボットは、主電源部とロボット本体部と外部バックアップ電源部とを備える。ロボット本体部は、サーボモータと、エンコーダデータを記憶するエンコーダ部と、エンコーダ部にバックアップ電源を供給する内部電池を含む内部バックアップ電源部とを有する。外部バックアップ電源部は、ロボット本体部の外部に設けられ、エンコーダ部にバックアップ電源を供給する。主電源部による供給電圧Vsは外部バックアップ電源部による供給電圧Vbat1より大きく、供給電圧Vbat1は内部バックアップ電源部による供給電圧Vbat2より大きく、供給電圧Vbat2はエンコーダ部の最低動作電圧Vsysより大きい。
(もっと読む)
141 - 150 / 1,155
[ Back to top ]