
株式会社デンソーウェーブにより出願された特許
111 - 120 / 1,155
ロボットのコントローラ
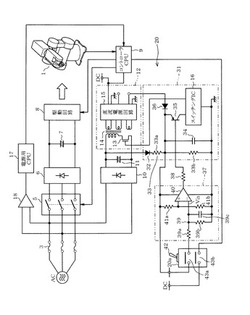
【課題】電源からロボット用電源とコントローラ用電源とを分岐して供給する構成のロボットシステムで、大電流を流すサーキットプロテクタを設けない構成とする。
【解決手段】交流電源ACからロボット本体1側にはコンタクタ5を介して給電し、コントローラ20側には直接整流回路10に給電している。コントローラ20は、コントローラCPU9、スイッチングIC16、遅延回路37、電源スイッチ20aなどから構成される。電源スイッチ20aがオンされると、コントローラCPU9が給電されてコンタクタ5をオンさせ、ロボット本体1を駆動制御する。電源スイッチ20aがオフされると、コントローラCPU9はロボット本体1の停止動作を行い、コンタクタ5をオフさせ、遅延時間をおいてトランジスタ35がオフされると、自身の給電が停止する。
(もっと読む)
方向探知装置

【課題】マルチパスが生じる状況であったとしても、精度のよい方向探知が可能な方向探知装置を提供する。
【解決手段】今回の測定時の第1段階推定方向D1(N)および1回前の第2段階推定方向D2(N−1)から角度差ΔDを算出し、この角度差ΔDと無線タグまでの推定距離Rとから、無線タグの推定移動距離Bを決定する。その推定移動距離Bの移動可能性に応じた重み係数Wを決定し、推定移動距離Bが、移動可能な距離でない場合には、小さい重み係数Wを決定する。よって、マルチパスの影響により、突然、第1段階推定方向D1(N)が大きく変化し、それにより、推定移動距離Bが大きくなると、重み係数Wは小さい値となる。この重み係数Wを用いて複数回分の第1段階推定方向D1の加重平均を行って第2段階推定方向D2(N)を決定することから、マルチパスの影響を抑えることができ、精度のよい方向探知が可能となる。
(もっと読む)
無線タグシステム
【課題】無線タグの消費電力を低減することができる無線タグシステムを提供する。
【解決手段】無線タグリーダ100は、無線タグ200からの信号を受信した場合、共通送信時点に無線タグ200にリーダデータを送信し、且つ、無線タグリーダ100毎に異なるタイミングに設定された2回目送信時点にもリーダデータを送信する。一方、無線タグ200は、共通送信時点に無線タグリーダ100から送信される可能性があるリーダデータを受信できる第1受信期間は受信可能状態とし、その第1受信期間にリーダデータを受信しなかったと判断した場合には第1受信期間が経過した時点で待機状態とする。また、第1受信期間の受信結果が受信エラーであれば、第2受信期間においても受信可能状態とする。
(もっと読む)
ロボットのコントローラ
【課題】電源からロボット用電源とコントローラ用電源とを分岐して供給する構成のロボットシステムで、大電流を流すサーキットプロテクタを設けない構成とする。
【解決手段】電源スイッチがオンされると、スイッチング制御回路が動作を開始し、コンバータ回路のスイッチング素子のオンオフ制御で制御用電源がCPUに供給され、自己の動作電源をコンバータ回路からダイオードを介して給電する。CPUにより、コンタクタがオンされてロボット用電力が供給される。電源スイッチがオフされると、CPUにより、給電監視手段によるダイオードブリッジへの給電停止の検出をもってスイッチのオフ状態が判断され、平滑コンデンサの充電電荷を電源として動作する期間中に、ロボット本体の停止制御の実行後に前記コンタクタがオフされる。
(もっと読む)
情報コード読取装置
【課題】情報コードをデコード可能な情報コード読取装置に関して、相対的に誤読が生じる可能性が高い場合に確認回数を増やして誤読を抑えることができ、相対的に誤読が生じる可能性が低い場合に確認回数を減らして読み取り速度を高め得る構成を提供する。
【解決手段】情報コード読取装置1は、デコード処理の確認回数を設定する確認回数設定手段を備えた判断手段を有している。この判断手段は、領域幅測定手段によって測定された明色領域及び暗色領域の少なくともいずれかの測定領域幅に応じて得られる実測データを、予め定められた基準データと比較し、その比較結果に基づいてデコード処理の確認回数を設定している。
(もっと読む)
無線タグ方向探知システム
【課題】方向判定精度と通信成功率をともに高くすることができる無線タグ方向探知システムを提供する。
【解決手段】無線タグ200は、偏波が互いに異なる第1アンテナ241、第2アンテナ242を備え、第1アンテナ241からデータを送信した後、第2アンテナ242からデータを送信する。無線タグリーダ100は、通信アンテナ140と方向探知アンテナ150を備え、通信アンテナ140は水平偏波を受信できるアンテナとし、方向探知アンテナ150は垂直偏波を受信できるアンテナとする。受信成功の判断には通信アンテナ140で受信した電波を用い、方向探知を行うための受信電力強度は、方向探知アンテナ150で受信した電波を用いる。通信アンテナ140で受信した電波によりデータの受信基準時点を定め、この受信基準時点に基づいて定まる期間に方向探知アンテナ150で受信した電波の受信電力強度から、無線タグ200の方向を決定する。
(もっと読む)
携帯型設定端末、及び監視システム
【課題】熟練度にそれほど依存することなく、且つ複雑なデータ入力作業を伴うことなく、監視エリアを所望の位置に正確に設定することが可能な構成を提供する。
【解決手段】携帯型設定端末1では、実空間の撮像画像内に監視エリアの境界画像を組み込んで表示することが可能となっており、境界画像の一部が指定され、その後に、境界画像の変更位置を指示する所定の指示操作がなされたときに、その指定位置を変更後の指示位置に変更するように境界位置データを再生成している。そして、この再生成された境界位置データを出力手段によって出力している。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲において三次元的に物体を認識し得るレーザレーダ装置において、レーザ光の走査をより高速に行い得る構成を、小型化、軽量化を図りつつ実現する。
【解決手段】レーザレーダ装置1に設けられた偏向部41には、水平面に対する勾配状態がそれぞれ異なるように構成された複数の反射面101〜104が中心軸42aを中心として多重に且つ多段に配されている。更に、偏向面41aに対してライン走査がなされるようにミラー31が制御され、この偏向面41a上におけるレーザ光L1のライン走査位置は、偏向部41の回転に応じて複数の反射面101〜104上を相対的に移動する。そして、この相対移動の過程において、ライン走査されるレーザ光L1が複数の反射面101〜104にそれぞれ入射し、各反射面からは水平面に対する角度がそれぞれ異なるようにレーザ光L1が反射するようになっている。
(もっと読む)
レーザレーダ装置
【課題】レーザ光の照射経路上のカバーで生じる内部反射光(外乱光)が受光センサに入り込むことをより確実に抑制することができ、外乱光に起因する誤検出を効果的に防止し得る構成を提供する。
【解決手段】レーザレーダ装置1では、受光面20aの前方側且つ下側寄りの位置を部分的に覆う構成で遮蔽部材70が配置されている。この遮蔽部材70には、受光面覆い部77と、上下に並ぶ複数の凸状部71とを備えており、いずれの凸状部71も、中心軸42aを通り且つ受光面20aの中心位置を通る切断面において外形が三角形状となっており、隣接する凸状部間には窪み79が形成されている。そして、窪み79の上側に配置される凸状部下方面は、レーザ光L1が凹面鏡41から前方側に照射されるときに、当該レーザ光L1の一部が透過板80で反射して生じる鏡面反射成分又はガウス拡散成分を窪み79の内壁に向けて反射するようになっている。
(もっと読む)
携帯型の無線タグリーダ
【課題】無線タグと無線通信を行い得る携帯型の無線タグリーダに関し、電源オフ状態となっている場合であっても外部のタグリーダからの指示によって当該機器のみを選択的に起動させ得る構成を提供する。
【解決手段】無線タグリーダ1には、外部のタグリーダと通信可能な無線タグチップ40が設けられており、電源回路15による電力供給がオフ状態のときに、外部のタグリーダが無線タグチップ40と無線通信を行ったこと及び当該無線タグリーダ1を指定する指定情報を送信したことを検出可能となっている。そして、このような無線通信及び指定情報の送信が検出されたときに、電源回路15からの電力供給がオン状態に切り替えられるようになっている。
(もっと読む)
111 - 120 / 1,155
[ Back to top ]