
株式会社デンソーウェーブにより出願された特許
11 - 20 / 1,155
無線タグ認証システムおよび無線タグリーダ
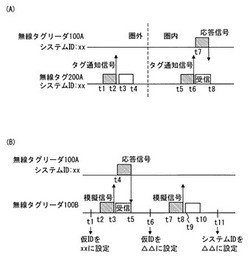
【課題】システムIDを含む信号を周期的に送信することなく、システムIDが周囲のシステムに使用されているかどうかを自動で判断することができる無線タグ認証システムを提供する。
【解決手段】無線タグリーダ100Bは、仮システムIDを自動生成し(t1)、仮システムIDを含んでいる模擬信号を送信する(t2−t3)。模擬信号は、他のシステムの無線タグリーダ100Aにとってタグ通知信号として認識できることから、無線タグリーダ100Aが模擬信号を受信し、その模擬信号に含まれている仮システムIDが自身のシステムのシステムIDと一致する場合には応答信号を送信し(t4−t5)、一致しない場合には応答信号は送信しない。無線タグリーダ100Bは、応答信号を受信した場合、模擬信号に含ませたIDは使用されていると判断し、応答信号を受信しない場合には(t9−t10)、仮システムIDをシステムIDとして設定する(t11)。
(もっと読む)
光学的情報読取装置

【課題】情報コードに対してローアングル光を照射しやすくし得る光学的情報読取装置を提供する。
【解決手段】基端側50aから先端側50bにかけて外径が縮径して筒状に形成され先端側50bの開口により第2の読取口51が構成されるとともに、基端側50aが読取口を覆うようにハウジングに対して着脱可能に形成される導光部材50が設けられており、この導光部材50は、当該ハウジングへの装着時に、照明装置から照射される照明光を基端側50aから先端側50bへ透過させて導光する。導光部材50の先端側50bには、透過する照明光を第1ローアングル光L1として第2の読取口51の中央に近付けて反射させる第1の反射面53が形成される。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲にわたる検出が可能であり、かつ3次元的な検出をも行いうるレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1は、レーザ光を発生するレーザダイオード10と、レーザダイオード10からレーザ光が発生したときに、検出物体によって反射されるレーザ光の反射光を検出するフォトダイオード20とを備え、さらに、所定の中心軸42aを中心として回動可能に構成された偏向部41を備えるとともに、偏向部41によりレーザ光を空間に向けて偏向させ、且つ反射光をフォトダイオード20に向けて偏向する回動偏向機構40と、回動偏向機構40を回転駆動するモータ50とが設けられている。そして、偏向部41に対するレーザ光の入射方向を相対的に変化させることで、偏向部41からのレーザ光の向きを、中心軸42aの方向に関して変化させる揺動ミラー31と、この揺動ミラー31を制御する制御手段とが設けられている。
(もっと読む)
データ構造、コンピュータプログラム、及びデータ取得装置
【課題】一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、3次元画像データにシミュレーション対象の識別データを付与することを可能としつつ、データ形式の変換に伴う識別データの欠損を抑制する。
【解決手段】部品データ20は、シミュレーション装置10において、生産ラインのシミュレーションに用いられる。部品データ20は、部品の3次元画像を特定する部品形状データ21と、部品を識別するデータである部品識別データ23と、を備えている。部品識別データ23は、部品の3次元画像に対して描かれるQRコード画像のデータとして指定されている。
(もっと読む)
ロボットの停止方法およびロボットシステム
【課題】複数台のロボットのうち、停止させようとするロボットが実際にどのロボットであるかを識別できるようにする。
【解決手段】複数台のロボット2〜5を制御する制御装置6の教示装置7を操作して1台のロボットを選択すると、選択されたロボットを除く他の全てのロボットの移動速度が減少する(告知動作)。この告知動作により、選択したロボットを識別できる。告知動作しないロボットが停止させようとしていたロボットと一致した場合、教示装置7により停止操作すると、そのロボットは停止される。告知動作しないロボットと停止させようとしていたロボットが異なる場合、教示装置7を操作しないでおくと、告知動作しなかったロボットが減速して告知動作したロボットと作業動作を終了する時点が同じ時期となる。
(もっと読む)
データ構造、コンピュータプログラム、及びデータ取得装置
【課題】一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、3次元画像データにシミュレーション対象の識別データを付与することを可能としつつ、データ形式の変換に伴う識別データの欠損を抑制する。
【解決手段】部品データ20は、シミュレーション装置10において、生産ラインのシミュレーションに用いられる。部品データ20は、部品の3次元画像を特定する部品形状データ21と、シミュレーションの実行時に表示される表示用テクスチャのテクスチャデータ22と、部品を識別するデータである部品識別データ23と、を備えている。テクスチャデータ22は、部品の外面に対して描かれる画像のデータとして指定され、部品識別データ23は、部品の内面に対して描かれるQRコード画像のデータとして指定されている。
(もっと読む)
ロボットの停止方法およびロボットシステム
【課題】複数台のロボットのうち、停止させようとするロボットが実際にどのロボットであるかを識別できるようにする。
【解決手段】複数台のロボット2〜5を制御する制御装置6の教示装置7を操作して1台のロボットを選択すると、選択されたロボットの移動速度が減少する(告知動作)。この告知動作により、選択したロボットを識別できる。告知動作したロボットを停止させる場合、教示装置7を操作すると、そのロボットは停止される。告知動作したロボットと停止させようとしていたロボットが異なる場合、教示装置7を操作しないでおくと、その後、他のロボットが減速して停止対象ロボットと作業動作を終了する時点が同じ時期となる。
(もっと読む)
プログラマブルコントローラのAC入力装置
【課題】100V系または200V系専用のAC入力装置に比べて装置が大幅に大型化することなく、100V系および200V系の両方のAC入力に対応可能とする。
【解決手段】制御部3は、判別回路5から交流電源11が200V系であるという結果が与えられるとフォトカプラ8をオフする。これにより、入力端子6からコンデンサC1、抵抗R1、R2を通じて入力端子7に至る通電経路が形成される。制御部3は、判別回路5から交流電源11が100V系であるという結果が与えられるとフォトカプラ8をオンする。これにより、入力端子6からコンデンサC1、C2の並列回路、抵抗R1、R2を通じて入力端子7に至る通電経路が形成される。コンデンサC1、C2は同一の静電容量値を有する。フォトカプラ8がオンした状態で形成される通電経路のインピーダンスは、フォトカプラ8がオフした状態で形成される通電経路のインピーダンスに対して1/2となる。
(もっと読む)
ロボット
【課題】ロボットにおける小型化を実現するとともに、電気ケーブルにおいてロボット伸縮動作に伴う不都合の発生を抑制する。
【解決手段】ロボット10は、固定部14と、昇降動作する昇降部15とを備え、それら固定部14と昇降部15とにFPCケーブル51の一端側と他端側とがそれぞれ接続されている。固定部14には、FPCケーブル51のケーブル表面の一面側に当接する第1折り返しバー52が設けられ、昇降部15には、FPCケーブル51のケーブル表面の他面側に当接する第2折り返しバー53が設けられ、それら各折り返しバー52,53により、上下方向にFPCケーブル51が折り返されている。昇降部15において第2折り返しバー53は上下方向に移動可能であり、その第2折り返しバー53は、本折り返しバー53での折り返し方向とは逆側に向けて付勢手段により付勢されるものとなっている。
(もっと読む)
無線タグ方向探知システム
【課題】ノイズ検出用のアンテナを追加することなく、ノイズの少ない通信チャネルを探すことができる無線タグ方向探知システムを提供する。
【解決手段】無線タグ200は、送信するデータを、トリガデータと、方向探知用データに分ける。無線タグリーダ100は、通信用アンテナ140で受信待ちを行い、トリガデータを受信したらチャネル指定データを送信する。このチャネル指定データを受信した場合に、無線タグ200は方向探知用データを送信する。また、無線タグリーダ100は通信用アンテナ140で受信待ちをしている間、方向探知用アンテナ150を用いて、方向探知チャネルの候補チャネルでノイズ強度を測定して方向探知チャネルを決定する方向探知チャネル決定処理を行なう。そして、チャネル指定データで、この方向探知チャネル決定処理で決定した方向探知チャネルを指定し、方向探知用データの送受信は、指定した方向探知チャネルで行う。
(もっと読む)
11 - 20 / 1,155
[ Back to top ]