
Fターム[2B034BA06]の内容
Fターム[2B034BA06]に分類される特許
141 - 160 / 277
農作業機
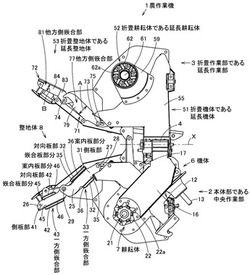
【課題】一方側嵌合部と他方側嵌合部との嵌合に不具合が生じず、折畳作業部を所望の展開作業状態に適切に切り換えることができる農作業機を提供する。
【解決手段】農作業機1は、中央作業部2と、この中央作業部2に対して回動する延長作業部3とを備える。中央作業部2の整地体8は、断面略コ字状の一方側嵌合部33,43を有する。一方側嵌合部33,43は、側板部31,41およびこの側板部31,41から突出する対向板部32,42のみにて構成する。延長作業部3の延長整地体53は、展開作業状態時に一方側嵌合部33,43と嵌合する他方側嵌合部77,81を有する。
(もっと読む)
オフセット作業機

【課題】作業部の反転作業を短時間で行い、畦塗り機のコストアップを抑え、作業部が通常作業方向や反転作業方向に向くときに騒音や振動等の発生を抑える。
【解決手段】オフセット作業機の一例である畦塗り機は、走行機体に装着される装着部5に対して回動可能に支持され、先端側に作業部60を首振り可能に支持したオフセット機構部20と、装着部5とオフセット機構部20との間に架設され、オフセット機構部20を揺動させる油圧シリンダ13と、オフセット機構部20に設けられた回動支持アーム23と作業部60との間に連結されたリンク機構部30及びオフセット機構部に取り付けられてこの回動に応じて移動しながらリンク機構部30に設けられたジョイント31の移動を案内する反転機構部を備える。反転機構部は、油圧シリンダ13が一定速度で伸縮してオフセット機構部20が回動するに伴って延伸方向が変化するガイド部材40によって案内されるジョイント31の案内方向を変えて作業部60の首振り速度を変える。
(もっと読む)
苗植機
【課題】 本発明では、左右整地ロータが乱れた泥土面を昇降しながら整地しても苗植付装置が昇降すること無く苗植付装置の苗植え付け深さが均等になるようにすることが課題である。
【解決手段】 走行車体の後側に昇降リンク装置を介して苗植付装置を装着した苗植機において、苗植付装置には圃場の泥土面を整地して均す整地ロータを設け、ロータ駆動ケースのロータ駆動軸から外軸及び該外軸に嵌合する内軸及び継手を介して伝動ケースへ伝動する構成とし、該伝動ケースから左右に突出する駆動軸に左右それぞれの取付軸を連結し、該取付軸と整地ロータが一体で回転し、伝動ケースの上下動により外軸と内軸がスライドする構成とし、走行車体と苗植付装置の間で、整地ロータ支持フレーム(68)の取付杆(67a,67b)を、後倒れ上方への直線的なスライド機構(A)を介して吊下げてなる。
(もっと読む)
オフセット作業機
【課題】シリンダにより作業部を通常作業位置から反転作業位置に移動させることができ、各作業位置において作業部のオフセット位置調節もシリンダで無段階に連続調節が可能なオフセット作業機を提供する。
【解決手段】オフセット作業機の一例である畦塗り機1は、走行機体90に装着され、走行機体90から動力を受けて走行機体90の走行位置に対して側方にオフセットした位置で畦塗り作業をさせる作業部60を備える。作業部60は、その基端側において走行機体90に装着される装着部5に対して回動可能に支持されたオフセット機構部20の先端側に回動可能に支持され、オフセット機構部20の回動角度を変更する伸縮機構部10がオフセット機構部20の回動角度を変更するに伴い、走行機体90の前進時に作業部60が作業を行う通常作業位置から走行機体90の後進時に反転された作業部60が作業を行う反転作業位置まで連続的に移動自在である。
(もっと読む)
農作業機
【課題】所望の回動速度で第2部を回動できる農作業機を提供する。
【解決手段】農作業機1は、中央作業部2と、この中央作業部2に対して回動する延長作業部3とを備える。農作業機1は、中央作業部2に対して延長作業部3を回動させる回動駆動手段31を備える。回動駆動手段31は、仮想楕円上に位置する凹凸部41を形成した一方側歯車33を有する。回動駆動手段31は、一方側歯車33の凹凸部41と噛み合う凹凸部46を形成した他方側歯車34を有する。他方側歯車34には、シリンダ35のロッド35aを接続する。
(もっと読む)
ロータリ耕耘装置用の整地部材
【課題】 ロータリ耕耘装置に使用される整地部材において、均平作業及び畝立て作業を適切に行えるように構成する。
【解決手段】 ロータリ耕耘装置8の上部カバー11の後端部11cに横方向に沿って連結される上辺部18aと、上辺部18aの反対側に位置する下辺部18bとを備え、上部カバー11の後端部11cの下方に位置するようにロータリ耕耘装置8に備えられた固定部12aに、下辺部18bの横方向の中央部を連結及び取り外し自在に構成する。
(もっと読む)
水田作業機
【課題】 機体の後部に水田作業装置を備え、機体と水田作業装置との間に整地装置を備えた水田作業機において、整地装置が田面の泥を押す状態を少なくする。
【解決手段】 機体の後部に水田作業装置5を備え、機体と水田作業装置5との間に整地装置53を備えて、整地装置53を田面Gに接地する作業位置と田面Gの上方に位置する退避位置とに亘って昇降自在に構成する。水田作業装置5が作業位置に下降駆動され且つ機体が設定距離だけ前進すると、整地装置53を作業位置に下降駆動する下降操作手段を備える。
(もっと読む)
砂糖きびの管理作業機
【課題】ディスクユニットをアタッチメントフレーム後方の横方向の支持棒から取り外さないで、前進方向に対する向きを反対方向に変更し、前進方向に対する角度を微調整することができ、かつ左右のディスクユニット間の間隔を変更し、調整することができるようにする。
【解決手段】ディスクユニットの縦軸の上端に旋回軸があり、縦軸が上記支持ブラケットfに対して旋回可能に支持されており、上記縦軸の旋回軸による旋回中心が横軸20の長手方向中心から所定偏心量だけ長手方向にずれており、上記縦軸の取付ブラケットを上記支持ブラケットfに固定する固定ボルト34が上記取付けブラケットのボルト孔及び上記支持ブラケットfの長孔に挿入されており、当該固定ボルトで取付ブラケットが支持ブラケットに固定され、縦軸が固定されるようにする。
(もっと読む)
除草機
【課題】回転円板の下面に凸条体を設けて表土を掘削しながら除草する除草機において、土壌の飛散を防止するカバーの取り付け構成の合理化を図る。
【解決手段】後端にエンジンを装着し該エンジンの動力を伝動する伝動軸2を内装し、先端側には伝動ギヤボックス4を設けた筒体フレーム3に、前記伝動ギヤボックス4に設けられ前記伝動軸2に連動して回転する縦駆動軸5を設け、該縦駆動軸5には下面に爪体7,7…を配設した円板6を固定し、前記筒体フレーム3部との装着部を支点として上下に揺動可能で且つ筒体フレーム3に対して任意の角度で固定可能なカバーフレーム16を設け、該カバーフレーム16に、前記円板6の周部の全部又は一部を覆うカバー体を設ける。
(もっと読む)
多用途型サトウキビ栽培管理装置並びに栽培管理方法
【課題】1台のトラクターに着脱するだけで、圃場の耕転砕土、種キビの切断・植付け作業、生育各段階ごとの培土といったサトウキビ栽培における異なる各作業内容が可能な多用途型のサトウキビ栽培管理方法と管理装置を実現する。
【解決手段】トラクターに装着状態の耕転用のロータリユニットの後部に着脱可能な植付けユニットと、左右一対の培土鋤とを用意しておき、圃場の耕転時には、植付けユニットや培土鋤は取り外し、植付け時には、植付けユニットを装着すると共に、溝掘り鋤で形成した植付け溝に、搭載されている種キビ切断機でカットされた種キビを連続的に落下させ、覆土された後を鎮圧ローラで加圧し、培土時には、ロータリユニットに左右一対の培土鋤を装着すると共に、左右一対のロータリ爪車を中央で左右に分離し所定の間隔を設ける。
(もっと読む)
歩行型電動管理機
【課題】耕耘作業時において耕耘効率を上げつつ作業者への労力をより低減させることができる歩行型電動管理機を提供する。
【解決手段】耕耘フレーム51の上端部とハンドルフレーム52の下端部との連結部53を囲繞するように耕耘フレーム51及びハンドルフレーム52にバッテリケース9が連結されている。当該バッテリケース9のバッテリ収容部93は、耕耘作業姿勢においてバッテリ収容部93に収容されるバッテリ2が平面視において機体幅方向両端部が耕耘フレーム51の下端部に挟持された耕耘部4とオーバーラップするように配置されている。また、ハンドルフレーム52は、耕耘作業姿勢において下端部から上端部へ行くに従って後方に位置し、当該上端部にハンドル部8が設けられる。さらに、移動輪6は、耕耘作業姿勢においてバッテリ収容部93の前方且つ下方に配設されている。
(もっと読む)
苗移植機
【課題】従来、圃場を耕耘して整地して畝を形成した後に、畝に苗の移植作業をするのが慣用的に行われている作業形態であった。ところが、圃場を耕耘や整地や畝を形成しないで、苗の移植作業をすることが、耕耘及び整地及び畝形成作業工数を減らして全体の作業効率を良くする作業形態として考えられるようになった。然しながら、水稲収穫後の圃場は、乾いて硬くなっており、圃場表面にはひび割れも発生していて、苗の移植作業を従来の機械で行なうことはできなかった。そこで、圃場を耕耘や整地や畝の形成を行わないで、苗の移植作業が適切に行なえる苗移植機を得ることを課題とする。
【解決手段】駆動輪11を装備した走行車体1に耕耘装置22を設け、該耕耘装置22の後方に苗植付部25を配置し、耕耘装置22の少なくとも上部を覆うカバー体24を苗植付部25の側方まで後方に向けて延設した苗移植機。
(もっと読む)
作業機
【課題】 回動させることで延長姿勢と退避姿勢とに姿勢変更可能とされた延長整地部の回動範囲の全域において、延長整地部を退避姿勢から延長姿勢へと回動させる方向にバネによって付勢したものにおいて、延長整地部を姿勢変更させる際の操作力を、ある程度、自由に設定することができる作業機を提供する。
【解決手段】 延長整地部26に一端側が掛止され他端側が索体46の一端側に掛止された引張りバネ41を備え、該引張りバネ41のバネ力が延長姿勢において延長整地部26を退避姿勢から延長姿勢へと回動させる方向に作用するように索体46の他端側を主整地部25側に係止し、且つ、延長整地部26の回動範囲の全域において、延長整地部26を退避姿勢から延長姿勢へと回動させる方向に引張りバネ41のバネ力を作用させるように、延長整地部26を延長姿勢から退避姿勢へと回動させる際に索体46を巻き付ける巻付けガイド52を設ける。
(もっと読む)
作業機
【課題】 回動させることで延長姿勢と退避姿勢とに姿勢変更可能とされた延長整地部の回動範囲の全域において、延長整地部を退避姿勢から延長姿勢へと回動させる方向にバネによって付勢したものにおいて、延長整地部を姿勢変更させる際の操作力を、ある程度、自由に設定することができる作業機を提供する。
【解決手段】 延長整地部26に一端側が掛止され他端側がリンク46の一端側に掛止された引張りバネ41を備え、この引張りバネ41のバネ力が延長姿勢において延長整地部26を退避姿勢から延長姿勢へと回動させる方向に作用するように、リンク46の他端側を主整地部25側に延長整地部26の回動軸心Xと平行な軸心回りに回動自在に支持し、延長整地部26を延長姿勢から退避姿勢へと回動させる際に、引張りバネ41の他端側の掛止部45がデッドポイントに至る手前でリンク46の回動を規制する規制部50を設ける。
(もっと読む)
オフセット作業機及び作業方法
【課題】圃場の隅までの連続的な直線作業を可能にする。
【解決手段】オフセット作業機1が走行機体90に装着される装着部10と、装着部10から左右方向に揺動可能なオフセット機構部20と、オフセット機構部20の移動端側に設けられた回転中心軸7の中心を回動中心として水平方向に回動可能に配設され、走行機体90の走行位置に対し、オフセット機構部20が側方へオフセットした位置で、走行機体90からオフセット機構部20を通じて伝達される動力によって作業を行なう作業部50とを有する。
回転中心軸7に、この回転中心軸7に対し、その中心を回動中心として回動可能な連結部材23を設け、作業部50を回転中心軸7の中心を回動中心として回動可能な連結部32に固定し、連結部材23と作業部50に、伸縮により作業部50を連結部材23に対し、回転中心軸7の中心を回動中心として回動させる伸縮シリンダ41を連結する。
(もっと読む)
移植機
【課題】走行機体の後部に昇降自在に連結した植付作業機の前方に圃場面を整地する整地装置を備えた移植機において、前記整地装置の昇降操作系と駆動操作系の操作手段とを簡潔且つ集約して構成できるようにする。
【解決手段】植付作業機9側に設ける整地装置31の昇降操作レバー37を利用して、整地装置31を作業位置と非作業位置とに上下動させる操作と、走行機体4の走行伝動系から分岐させた動力を整地装置31に伝達するクラッチ69の入切操作とを、簡潔且つ安価な構成により1本の操作レバーで以って連係操作可能に構成した。
(もっと読む)
畦塗り機
【課題】圃場条件に拘わらずに前処理体及び整畦体の整畦作業により発生する反力をコールタが受けて、走行機体の直進性を向上させる。
【解決手段】畦塗り機1は、前処理体21及び整畦体25の整畦作業により発生する反力を受けるコールタ60を備える。コールタ60は、オフセット機構部40から伝達される動力を前処理体21及び整畦体25に振り分ける動力伝達機構を有した支持ケース29の後端部に上下方向に回動自在なコールタ支持部材62を介して設ける。コールタ支持部材62は昇降シリンダ63によって回動してコールタ60を上下方向に移動させる。コールタ支持部材62にセンサアーム66を上下回動自在に設け、センサアーム66の枢支部66aにポテンショメータ68を設ける。ポテンショメータ68の信号は制御装置に伝達され、制御装置はポテンショメータ68の信号に応じて昇降シリンダ63の作動を制御してコールタ60の刺さり込み量を一定にする。
(もっと読む)
畦成形機
【課題】従来の畦成形機は、構成や制御が複雑となり、操作が難しいとともに保守点検等にコストが係り全体のコストが嵩む問題があった。
【解決手段】装着フレーム1と、支持フレーム回動軸20を中心に水平回動手段25によって回動可能である支持フレーム2と、支持フレーム2に沿って移動可能に設けられるとともに水平回動する畦成形作業部3と、一端を装着フレーム1の支持フレーム回動軸20よりも前側に回動自在に設けるとともに他端は畦成形作業部3に回動自在に設け装着フレーム1と畦成形作業部3とを連結する連結部材7とを有し、支持フレーム2を走行機Tの直進方向と直交する方向から45度の回動角以内の予め設定した位置に自動回動させ、自動回動させた位置から支持フレーム2を回動させるとともに走行機Tが畦から離れる方向に旋回走行しながら直線状の畦を成形する畦成形作業を行なう畦成形機による。
(もっと読む)
畦成形機
【課題】従来は、作業部に方向等を感知するセンサーが必要であり、制御が複雑となり全体のコストが嵩む問題があった。
【解決手段】装着フレーム1から後方へ延設され、装着フレーム1に対し第1水平回動軸30を回動中心に第1水平回動手段3によって水平回動自在に設けられた支持フレーム2と、支持フレーム2の後端部に設けられた第2水平回動軸40を中心に、第2水平回動手段4による回動又はフリー回動によって水平方向に回動可能である畦成形作業部5と、第1水平回動手段3と、第2水平回動手段4とをそれぞれ制御する制御部と、第1水平回動手段及び/又は第1水平回動軸と第2水平回動手段及び/又は第2水平回動軸の変位量を検知する検知手段を有し、畦成形作業を行なうことが可能である畦成形機による。
(もっと読む)
畦成形機
【課題】走行機を旋回及び停止させながら圃場隅部の畦成形を容易に行えるとともに堅固な畦を成形できる。
【解決手段】装着フレーム1から斜め後方へ延設され、装着フレーム1に対し第1水平回動手段21によって水平回動自在に設けられた支持フレーム2と、支持フレーム2に水平移動手段4によって装着フレーム1に対して遠近移動可能である第2水平回動軸54を中心に第2水平回動手段6による回動又はフリー回動によって水平方向に回動可能である畦成形作業部5と、第1水平回動手段21と、第2水平回動手段6と、水平移動手段4とをそれぞれ制御する制御部とを有し、畦成形作業部5を走行機の側方にオフセットさせ、畦と平行に走行機Tを走行させ畦成形作業を行なうことが可能であり、走行機Tが旋回走行しながら直線状の連続した畦を成形する畦成形作業を行なうことが可能である畦成形機による。
(もっと読む)
141 - 160 / 277
[ Back to top ]