
Fターム[2B034BA06]の内容
Fターム[2B034BA06]に分類される特許
101 - 120 / 277
乗用溝切り機
【課題】駆動装置による圃場での安定走行を実現すると共に、圃場だけでなく舗装路のような道路でも乗用が可能となる画期的な乗用溝切り機を提供すること。
【解決手段】操舵する前輪1と、駆動輪となる後輪2とを乗用部3に設け、少なくとも後輪2を右後輪2Rと左後輪2Lとを有する複数輪に構成すると共に、この右後輪2Rと左後輪2Lとを、駆動装置8により回転駆動される回転駆動軸と連結して駆動するように構成し、この回転駆動軸と前記右後輪2R若しくは左後輪2Lとを連結する連結部10に、この回転駆動軸の回転を伝達する駆動連結状態と回転が伝達されないで回転自在となるフリー連結状態とに切り替える駆動・フリー切り替え機構11を設ける。
(もっと読む)
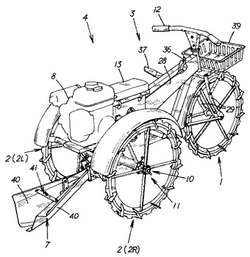
乗用溝切り機

【課題】溝切り部が圃場に接したままUターンしても溝切り部を変形したり破損したりすることがなく、溝切り部を必要に応じて上方へ退避させることも可能な乗用溝切り機を提供すること。
【解決手段】操舵するハンドル部12を設けた乗用部3に駆動輪を設けた乗用走行部4に、圃場5に溝6を形成する溝切り部7を設けた操舵旋回可能な自走式の乗用溝切り機において、上昇退避自在に設けた前記溝切り部7を左右に揺動自在に設ける。
(もっと読む)
中耕除草機
【課題】枝の高さが低く、樹木間の距離が狭い作業環境に好適で、操作性が良好で、作業者の負担が小さな中耕除草機を提供する。
【解決手段】中耕除草機の本体に、前後の中耕爪輪と移動制御部とを設け、枝の高さが低く、樹木間の距離が狭い作業環境であっても、移動制御部によって、前後の中耕爪輪において使用する中耕爪輪を選択することによって、中耕除草機の前進速度の制御、前進後退の進行方向の制御を容易とし、これによって、中耕除草機の操作性を向上させ、作業者の負担を軽減する。
(もっと読む)
水田溝切り機の溝切り刃
【課題】水田溝切り機の溝切り刃に入り込んだ土砂を容易に除去できるとともに、除去するのに用いた道具の後始末を容易にする水田溝切り機の溝切り刃を提供する。
【解決手段】溝切り刃20は、溝の側面を形成する側板部21と、溝の底面を形成する底板部23を備えている。溝切り刃20には、溝切り刃20内に入り込んだ泥土を除去する泥土作業具30を保持する保持具40が設けられている。保持具40は、溝切り刃20の上面側に設けられ、泥土作業具30が、溝切り刃20の上面側の左右の側板部21の間に着脱自在に保持される。
(もっと読む)
コルター装置
【課題】コルターの脱着作業をする必要がなく、装置本体の農作業機取付部に取り付けた農作業機にて適切な農作業ができるコルター装置を提供する。
【解決手段】コルター装置1は、装置本体11を備え、装置本体11には、コルター支持体12を左右位置調整可能に設ける。コルター支持体12には、コルター13を回転可能に設ける。装置本体11は、トラクタ2に取り付けるトラクタ取付部26と、農作業機を脱着可能に取り付ける農作業機取付部27とを有する。コルター13は、装置本体11に対して高さ位置調整可能である。
(もっと読む)
オフセット作業機
【課題】作業部の向きを反転状態に維持したまま反転作業位置において作業部のオフセット移動が可能なオフセット作業機の提供。
【解決手段】畦塗り機は、走行機体に装着される装着部5に対して揺動可能に支持され、先端側に作業部60を首振り可能に支持したオフセット機構部10と、これを揺動させる揺動シリンダ17と、オフセット機構部10の先端側に設けられた回動支持アーム15と作業部60との間に連結されたリンク機構部20及びオフセット機構部10の揺動に応じてリンク機構部20のジョイント21の移動を案内して作業部60の向きを反転可能なガイド部材30を備える。ガイド部材30は、作業部60の向きを反転状態に維持したまま反転作業位置において、オフセット機構部10の揺動に伴って作業部60をオフセット移動させる反転オフセット溝35を有する。
(もっと読む)
オフセット作業機及び制御方法
【課題】走行機体の進行に沿ったオフセット位置で圃場隅部までの連続的な前進作業を可能にする。
【解決手段】オフセット位置で作業可能な作業部120と、この方向と位置の基準値を設定する記憶部と、方向及び位置を検出する角度センサ150及び位置センサ151と、方向及び位置を調整する方向シリンダ141及びオフセットシリンダ140と、これらシリンダを制御する制御手段160を備え、制御手段160は、作業部の位置と方向を所定状態に維持して作業する通常作業モード、予め設定された作業部の方向と位置を基準値とし、走行機体の走行方向の変化に伴う作業部の位置と方向の変化を調整して直線状作業を維持する自動直進作業制御モード、このモード終了時の位置を起点とし、隅部に残存する未作業部分を直線状又は円弧状に作業する自動隅部作業制御モードを有し、自動隅部作業制御モードでは段階的に変化する間歇動作による制御をすること。
(もっと読む)
多条苗移植機
【課題】各機器を収納位置に格納した状態において、煩わしい取扱いを要することなく、機器の保護を確保することができる多条苗移植機を提供する。
【解決手段】多条苗移植機は、多条の植付け幅の外側部分を収納位置に格納可能として苗を多条並列に保持しつつ苗株を植付けする苗移植装置と、この苗移植装置より前寄りの圃場面相当位置に破砕ロータ(352)を軸支して植付け条を整地する整地ローター装置とを備えて構成され、上記整地ローター装置は、植付け進行方向に延びる支軸についてその外側部分を側方に跳ね上げるようにして破砕ロータ(352)の軸線が起立する収納位置まで回動可能に軸支し、この収納位置の破砕ロータ(352)は、格納状態の苗移植装置より外側方に突出して配置したものである。
(もっと読む)
田植機
【課題】整地ロータ側に動力を取出す整地ロータ伝達構造を簡単に構成でき、且つ整地ロータ伝達構造の組付け作業性等を向上できるようにした田植機を提供する。
【解決手段】リヤアクスルケース33には、エンジン21からの動力が伝達される後輪走行入力軸75と、後輪走行入力軸75に連動して左右の後輪4へ動力を伝達する分配軸91と、後輪走行入力軸75に連動して整地ロータ80へ動力を伝達する整地ロータ駆動軸85とが備えられ、後輪走行入力軸75に、分配軸用ベベルギヤ100aと連動用ベベルギヤ107とを介して分配軸91を連結し、平面視で、後輪走行入力軸75を挟んで、連動用ベベルギヤ107から離れる方向に、整地ロータ駆動軸85をオフセットさせて設けた。
(もっと読む)
ロータリ耕耘装置
【課題】リヤカバー体先端縁部の整地機能を良好に確保すること。
【解決手段】取付体は、リヤカバー体側に設けた取付片と整地体側に設けた被取付片とから形成し、取付片には、リヤカバー体の先端縁部よりも後方位置で、かつ、同先端縁部の下面に形成した整地面の仮想延長線よりも上方位置に取付片側係合部を設けると共に、その上方位置に取付片側連結部を設ける一方、被取付片には、前記取付片側係合部に係合する被取付片側係合部を設けると共に、同被取付片側係合部を係合させた取付片側係合部を支点として前記取付片側連結部に連結する被取付片側連結部を設けて、リヤカバー体の先端縁部に取付体を介して整地体を着脱自在に取り付けている。
(もっと読む)
折り畳み作業機における延長レベラの復元装置
【課題】トラクタの後方に位置する本体作業機とそれに対して折り畳み自在に連結される延長作業機を備え、延長作業機が本体作業機の本体ロータに連結可能な延長ロータを覆う延長エプロンとその後方に揺動自在に連結される延長レベラを有する折り畳み作業機において、延長レベラが畦等から外力を受けて延長エプロンに対して回転したときに、延長レベラを回転前の状態に復帰させる。
【解決手段】延長作業機7の本体作業機2との連結状態のときに、延長レベラ11を本体レベラ6の揺動に連動させて揺動自在とする。
延長作業機7が折り畳み状態にあり、延長レベラ11が外力を受けたときに延長エプロン5に対して回転可能とする。
延長レベラ11が本体レベラ6に連動し得る状態となる側へ延長レベラ11を直接、もしくは間接的に付勢する付勢部材23を備える。
(もっと読む)
カルチベータ用横流れ防止装置
【課題】 傾斜地を耕作する場合であっても、トラクタが横流れするのを防止するためのカルチベータ用横流れ防止装置を提供することである。
【解決手段】 本発明のカルチベータ用横流れ防止装置(10)は、カルチベータの進行方向に対して実質的に直交する方向を回転軸線として回転可能に配置されたゴロクラッシャ(12)と、ゴロクラッシャの実質的に中央に、ゴロクラッシャが地面で回転すると、地面に食い込んで一緒に回転するようになった羽根片を有する横流れ防止羽根(16)とを備えていることを特徴とするものである。
(もっと読む)
代掻き作業機
【課題】畦もしくは畦際の斜面上に載置されたり、トラクタに牽引されて畦の斜面を下さる際にレベラが上方に向かって回動してもレベラを元の整地姿勢に戻すことができる代掻き作業機の提供。
【解決手段】整地姿勢と土引き作業姿勢とに切り換え自在に配されたエプロン4及びレベラ5とを備えた代掻き作業機10において、整地姿勢から上向きに所定角度を超えて回動したレベラ5に押圧されることにより、レベラ5を整地姿勢に戻る方向に向かって回動させる付勢力をレベラ5に加えるダブルトーションバネ1をエプロン4とレベラ5とを接続するヒンジ部45に設ける。これにより、畦もしくは畦際の斜面上に載置されたり、トラクタに牽引されて畦の斜面を下る際に上方に回動したレベラ5は、レベラ5の接する泥土面が水平になるに連れてダブルトーションバネ1の付勢力により整地姿勢に戻される。
(もっと読む)
代掻き作業機
【課題】畦もしくは畦際の斜面上に載置されたり、トラクタに牽引されて畦の斜面を下る際にレベラが上方に向かって回動してもレベラを元の整地姿勢に戻すことができる代掻き作業機の提供。
【解決手段】操作ロッド1bを動作させてレベラ5を整地姿勢と土引き作業姿勢とに切換自在な土寄せ操作装置1とを備えた代掻き作業機10において、土寄せ操作装置1に、整地姿勢から上向きに所定角度を超えて回動したレベラ5に押圧されることにより、レベラ5を整地姿勢に戻る方向に向かって回動させる付勢力をレベラ5に加える引っ張りコイルバネ1jを有したレベラ姿勢制御部1hを設ける。これにより、畦もしくは畦際の斜面上に載置されたり、トラクタに牽引されて畦の斜面を下る際に上方に回動したレベラ5は、その泥土面が水平になるに連れて引っ張りコイルバネ1jの付勢力により整地姿勢に戻されるので、代掻き作業機1を畦際まで近づけることが可能となる。
(もっと読む)
オフセット作業機
【課題】トラクタにオフセット作業が行えるように装着された作業機の自由度を制御して、精度の高い連続作業を可能にする。
【解決手段】走行機体2の後方にこの走行機体2に対し、その幅方向に水平移動自在に架設される伝動部材13に装着され、前記走行機体2の走行にともなって進行し、前記走行機体2の走行位置に対して側方にオフセットした位置での前進作業中に、畦に沿ったまま前記走行機体2に対する水平回動と水平移動の組み合わせからなる2つの動きの自由度を有する作業部51と、前記作業部51の位置及び方位を検出するセンサ20からの情報に基づいて前記作業部51の水平回動と水平移動の前記2つの量を独立して無段階に制御し、前記走行機体2の旋回をともなう前進動時に前記作業部51を畦に沿わせたまま、その、圃場の隅部付近までの直進性を維持させる制御手段を備える。
(もっと読む)
移植機
【課題】植付深さを調整する調整レバー及び載せ台からの苗の掻き取り量を変更する変更レバーを設け、植付け深さ調整に整地作業機の昇降高さ調整を連動させる移植機において、左右バランスが良好な移植機を提供する。
【解決手段】走行機体の後方に配置された苗載せ台と、苗載せ台の下方に配置されて苗を掻き取って圃場に植付ける植付部と、植付部の前方に配置されて圃場を整地する整地作業機6と、昇降作動機構33と、植付深さを調整する調整レバー31と、対地高さの変更に整地作業機6の昇降高さを連動させる連動機構34と、苗載せ台と植付部との距離を変更して苗の掻き取り量を変更する変更レバー27とを備え、植付作業機4の少なくとも一部を構成し、植付作業機の左右の一方側に、昇降作動機構33及び連動機構34を配置するとともに、他方側に調整レバー31及び変更レバー27を配置した。
(もっと読む)
ロータリ耕耘装置用の整地部材
【課題】コスト的に有利であり、尚且つ作業性も良いロータリ耕耘装置用の整地部材を提供すること。
【解決手段】可撓性を有する2つの平板18を備え、2つの平板18のそれぞれの上端部18aがロータリ耕耘装置のカバー11の後端部に連結された状態で、2つの平板18がカバー11の後端部に沿って横方向に並設されており、平板18の下辺部18bに沿った横向き姿勢で横方向に並設されて取り付けられた状態、及び平板18の外側縦辺部18eに沿った縦向き姿勢で平板18に取り付けられた状態に姿勢変更自在に、金属製の支持板25を2つの平板18のそれぞれに備えてあるロータリ耕耘装置用の整地部材。
(もっと読む)
畦塗り作業機
【課題】移動時における走行機体と作業機との前後バランスを向上させ、精度の良い畦塗り整形作業を行える畦塗り作業機を提供すること。
【解決手段】走行機体90に装着される装着部5と、装着部5から左右方向に移動可能なオフセット機構部10と、オフセット機構部10の移動端側に設けられた回動支点Oを中心として、水平方向に回動可能に配設された前処理体21及び整畦体40を有する作業部20と、走行機体90から伝達される動力によって前処理体21及び整畦体40を回転駆動させる動力伝達機構部50とを備えてなる畦塗り作業機において、前処理体21は回転軸23と回転軸23に放射状に取付られる耕耘爪24とを備え、回動支点Oは平面視において整畦体40の回転中心軸上に設けられ、平面視において、整畦体40の回転中心軸の方向と前処理体21における耕耘爪24の取付方向との成す角度が鋭角となるように配置されていること。
(もっと読む)
畦塗り機
【課題】トラクタにオフセット作業が行えるように装着された畦塗り作業機の自由度を制御して、精度の高い連続作業を可能にする。
【解決手段】走行機体2の後方に装着され、側方にオフセットした位置で作業部51が前進畦塗り作業を行う畦塗り機50において、作業部51の位置及び方位を検出する位置方位センサ20と、走行機体2と作業部51との相対位置を制御する第一の自由度を構成する手段と、作業部51の姿勢を制御するための第二の自由度を構成する構成手段と、前記第一の自由度および第二の自由度における水平回動量または水平移動量を制御する手段を備え、圃場隅部における走行機体2の姿勢変化に対応して、位置方位センサ20からの情報に基づき前記第一の自由度および第二の自由度における水平回動量または水平移動量を制御し、作業部51が畦に沿って直進姿勢を保持し、圃場の隅部付近までの直進作業状態を維持させる。
(もっと読む)
作業機
【課題】 本発明は、簡潔な構成で一部の作業部のみを着脱可能にし作業部の着脱作業の容易化を図ると共に、作業部として除草部を装着した場合、補助作業装置である整地装置が作業の邪魔にならない構成として良好な除草作業が行えるようにした作業機を得ることを課題とする。
【解決手段】 走行車体2の後側に昇降リンク装置3を介して縦リンク43を昇降可能に設け、該縦リンク43に前後方向の連結軸44を介して着脱用基部フレーム150を左右ローリング可能に設け、該着脱用基部フレーム150に上下動機構を介して整地ロータ27を上下動可能に支持させて設け、着脱用基部フレーム150に着脱される着脱ヒッチ151を介して除草部152を装着し、該除草部152を装着した状態で除草部152の下端よりも整地ロータ27が高位で地面に対して浮上する構成とした。
(もっと読む)
101 - 120 / 277
[ Back to top ]