
Fターム[2B043BB14]の内容
農業機械一般(操向) (6,001) | 農業機械の作業別の種類 (591) | 収穫機 (137) | コンバイン (123)
Fターム[2B043BB14]に分類される特許
1 - 20 / 123
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記旋回量微調節手段の操作量に対応させて変更可能に構成した。旋回量微調節手段による走行機体の旋回量の調節量は、旋回量微調節手段の操作量に対応させて変更可能に構成しているため、オペレータは、旋回量微調節手段の操作量を変更することで、簡単に旋回量微調節手段による走行機体の旋回量の調節量を変更することができる。
(もっと読む)
コンバイン

【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記操向手段の操作量に対応させて変更可能に構成した。したがって、操向手段による旋回操作性を良好に確保した上で、更に旋回量微調節手段による補足的な操作を付加することができる。この際、調節量を操向手段の操作量に対応させて変更することで、操向手段による大雑把な旋回操作と旋回量微調節手段による補足的かつ微細な旋回操作を一体密接的に関連づけることができる。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記走行機体の速度に対応させて変更可能に構成した。したがって、操向手段による旋回操作性を良好に確保した上で、更に旋回量微調節手段による補足的な操作を付加することができる。この際、旋回量微調節手段による走行機体の旋回量の調節量を走行機体の速度に対応させて変更可能に構成しているため、かかる調節量を走行機体の速度に対応させて変更することで、種々の状況に即応させて走行機体の曲がり具合を変更することができる。
(もっと読む)
コンバイン
【課題】電動モータを駆動源とするコンバインにおいて、従来の旋回操作方法を変更することなく、急旋回や緩旋回等の旋回を行えるようにして、圃場作業における操縦性を高める。
【解決手段】左右のクローラ走行装置(3R,3L)を変速可能な左右の電動モータ(5R,5L)で夫々駆動すると共に該クローラ走行装置(3R,3L)を制動する左右のブレーキ(6R,6L)を設け、操縦席に立設する操向レバー(21)の左右傾倒角度に応じて該操向レバー(21)を傾倒した側の電動モータ(5R又は5L)の回転速度を減速させ、操向レバー(21)の傾倒角度が設定角度に達した場合にブレーキ(6R又は6L)を作動させて傾倒側のクローラ走行装置(3R又は3L)の回転を停止させる構成とする。
(もっと読む)
農作業車両運行管理システム
【課題】 農作業車両の運行状況を即時的に、空間的に確認することができる農作業車両運行管理システムを提供することにある。
【解決手段】 農作業車両に搭載された移動体装置から送信された位置情報を受信し、地図データベースから取得した地図データの表示画面に重ねて表示する手段を備えることを特徴とする。また、移動体装置から送信された位置情報と、地図データベースから取得した圃場データとの重なりの条件によって、表示画面に作業状況を色分け表示する手段をさらに備えることを特徴とする。また、移動体装置から送信された位置情報の日付と、地図データベースから取得した圃場データと圃場データに格納された作業予定日の比較結果に基づき、表示画面に圃場データを色分け表示する手段を備えることを特徴とする。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応すること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量を変更可能に構成した。その結果、オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させることができる。
(もっと読む)
移動作業機の自動操縦装置
【課題】移動作業機の例として、稲刈り機やトラクターなどが挙げられるが、これらの移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】レーザー光の発信機能及び受信機能を有し、目標物の方向及び距離を検出する測定装置を備えた移動作業機があって、移動作業機の作業領域の周囲に反射材を有する複数の案内支柱を設置し、案内支柱を目標物として測定装置の検出した情報を基に移動作業機の進路方向及び移動距離を演算する演算装置と、演算装置の結果を基に移動作業機の操縦装置を操作する制御装置を備えることにより、案内支柱に沿って移動作業機が自動で作業を行うことを可能にした。
(もっと読む)
移動作業機の操縦制御装置
【課題】乗用型移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】移動作業機に設置した1つの可動式方向測定装置と、2つの可動式距離測定装置により作業領域の周囲に設置した複数の案内支柱を検出して移動作業機の進路の基準とし、移動作業機の進行に伴って目標とする案内支柱を切り換えながら途切れることなく検出し、移動作業機に内蔵する演算制御装置が正しい進路を進行するよう移動作業機を制御することで、移動作業機の案内支柱の列に沿った前進、転回を自動操縦で行うことを可能とし、前記課題を克服する。
(もっと読む)
作業車両
【課題】ミッションケース88に設けられた直進出力検出手段93と旋回出力検出手段95とを泥土等から保護するガード板353に関して、ミッションケース88に取り付け易い構造で且つ部品点数も少なくする。
【解決手段】ミッションケース88における左右一側面の上部側に、直進用及び旋回用油圧式無段変速機構53,54を内蔵する油圧変速ケース350を取り付ける。前記ミッションケース88のうち前記油圧変速ケース350と反対側の側面から横方向外向きに突出したPTO軸99の突端側に、PTOプーリ119を配置する。前記ミッションケース88のうち前記PTO軸99より下方に、前記直進用油圧式無段変速機構53の変速出力量を検出する直進出力検出手段93と、前記旋回用油圧式無段変速機構54の変速出力量を検出する旋回出力検出手段95とを、前後に並べて配置する。正面視で前記ミッションケース88と前記PTOプーリ119との間に位置するガード板353によって、前記両出力検出手段93,95の外周側を覆う。
(もっと読む)
コンバイン
【課題】穀稈の状況に応じた適切な進路を把握でき、刈取作業が行いやすくなるコンバインを提供する。
【解決手段】走行部2と、前記走行部2の前方に配置される刈取部3と、前記刈取部3の後方で前記走行部2の前部上に配置される運転部8とを備えるコンバイン1であって、前記運転部の前方を撮影する第一撮影手段12と、前記第一撮影手段12により撮影された映像を表示する表示装置85と、前記運転部8の操向操作手段(ハンドル82)の操作量に基づいて予測進路軌跡Bを作成する制御装置97とを備え、前記制御装置97は、前記予測進路軌跡Bを前記第一撮影手段12により撮影された映像に重畳させ、この予測進路軌跡Bが重畳された映像を前記表示装置85に表示させる。
(もっと読む)
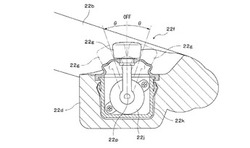
作業車の操向制御装置
【課題】トランスミッションの応答性能に拠らず、さらに、機体位置検出手段が検出不能域に存在する場合であっても、機体を、所定の進行方向から外れることなく圃場の作物に沿って自動操向させることのできる作業車の操向制御装置を提供すること。
【解決手段】機体位置検出手段16の検出値に基づいて、修正出力を出して機体が圃場の作物Mに沿うように操向操作手段22a,22bを制御する操向制御手段23aと、操向制御手段23aが修正出力の出力を開始すると、右及び左の回転数検出手段26a,26bの検出値の差を演算する演算手段23bとを備え、演算手段23bの演算値が設定値以上になると、操向制御手段23aが修正出力の出力を停止するように構成する。
(もっと読む)
走行車両
【課題】走行機体に搭載されたエンジンの動力を変速する直進用及び旋回用変速機と、直進用変速機に対する直進操作具と、旋回用変速機の旋回操作具とを備えている走行車両において、操作系統の簡素化及び操作性の向上を図る。
【解決手段】互いに直交する旋回軸線及び変速軸線回りに回動可能な制御体を内蔵したステアリングボックス120を備える。旋回操作具の操作に伴う制御体の旋回軸線回りの正逆回動にて旋回用変速機54を作動させる一方、直進操作具の操作に伴う制御体の変速軸線回りの正逆回動にて直進用変速機を作動させるように構成する。ステアリングボックス120は、走行機体に設けられた操縦部9のうち走行機体1の左右中央側に位置するサイドコラム12内に配置する。
(もっと読む)
コンバイン
【課題】可変容積型油圧ポンプ及び可変容積型油圧モータを有する走行用HSTと機械式の多段変速装置とが走行系伝動経路に直列的に介挿され、前記走行用油圧モータが走行モード切替操作部材への人為操作に基づき選択的に小容積状態又は大容積状態とされるコンバインにおいて、低速走行させる必要がある場合における走行安全性を向上させる。
【解決手段】制御装置は、副変速検出センサからの信号に基づき前記多段変速装置が最低速段に係合していると判断する場合には、前記走行モード切替操作部材からの人為操作信号に拘わらず前記走行用油圧モータが大容積状態となるように走行モード切替作動機構を強制的に作動制御する。
(もっと読む)
走行車両
【課題】走行機体に搭載されたエンジンの動力を変速する直進用及び旋回用変速機53,54と、直進用変速機53に対する直進操作具と、旋回用変速機54の旋回操作具とを備えている走行車両において、操作系統の簡素化及び操作性の向上を図る。
【解決手段】互いに直交する旋回軸線及び変速軸線回りに回動可能な制御体を備える。旋回操作具の操作に伴う制御体の旋回軸線回りの正逆回動にて旋回用変速機54を作動させる一方、直進操作具の操作に伴う制御体の変速軸線回りの正逆回動にて直進用変速機53を作動させるように構成する。制御体は、各変速機53,54からの出力を左右の走行部に伝達するミッションケース18に内蔵する。
(もっと読む)
コンバイン
【課題】センサにより旋回機構の異常を検出しても、作業者が旋回機構の異常を認識しないで作業することがある。
【解決手段】コンバインは、左右の車軸51の回転に回転差を発生させて旋回する無段階に変速可能な走行装置3と、走行装置3の操向レバー75の操作位置を検出する操向レバー位置検出手段76と、前記左右の車軸51の夫々の回転数を検出する回転検出手段78とを有する。制御コントローラ79の旋回制御異常検出手段80は、検出した左右の車軸51の回転差と、前記操向レバー75の傾倒操作角度とを対比して、旋回制御異常検出手段80で旋回制御の異常を検出し、該旋回制御異常検出手段80が異常と判定すると、異常を報知手段81により報知する。
(もっと読む)
農業用管理システム
【課題】多数の圃場の中から正確に農作業をする圃場を識別することができるGPS衛星を利用した管理システムを提供すること。
【解決手段】農業機械10の電子制御機器11は、記録媒体16の情報を読み取ると、GPS衛星13からの電波の受信により割り出した農業機械10の圃場識別情報Aと記録媒体16から読み取った特定の圃場の位置情報Bと照合して農業機械10のモニタ12に圃場識別情報Aと特定の圃場の位置情報Bを表示させ、農業機械10が当該特定の圃場の位置に到着すると、当該特定の圃場の圃場内情報Cを表示させる機構を備えているので、特定の圃場位置情報Bに対応する圃場識別情報Aを交互に又は同時にモニタ12に表示しながら移動できるので、その地域の土地勘のないオペレータも迷うことなく前記特定の圃場に到着できる。
(もっと読む)
作業車の旋回制御装置
【課題】摩擦式油圧クラッチを兼用することにより走行駆動手段の構成の簡素化を図り、併せて、適切にブレーキ旋回状態を現出させることが可能となる作業車の旋回制御装置を提供する。
【解決手段】走行駆動手段が逆転クラッチの操作圧を変更することにより、ブレーキ旋回状態と逆転旋回状態とに切り換え自在に構成され、前記逆転旋回状態が指令されると、摩擦式油圧クラッチの操作圧を逆転旋回用操作圧にし且つブレーキ旋回状態が指令されるとブレーキ旋回用操作圧に調整するブレーキ旋回用処理を実行し、且つ、ブレーキ旋回状態の指令に切り換えられた直後においては、予め設定された初期操作圧を目標操作圧として設定し、その後は、ブレーキ旋回状態であると判別されるまで、初期操作圧から圧力を変更させた補正操作圧を目標操作圧として設定して、摩擦式油圧クラッチの操作圧を調整する。
(もっと読む)
コンバインの自動方向制御装置
【課題】オペレータが疎植圃場を刈り取っていることしっかり認識し、刈取走行方向が乱れようとすると直ちに手動操向によって走行方向を修正出来るようにする。
【解決手段】穀稈センサ1a,1bが未刈穀稈に接触して刈取部13の位置を検出し、その検出結果で走行方向を制御する制御装置2を設けたコンバインの自動刈取方向制御において、従来の植付間隔よりも広い疎植を判定する手段S22を設け、刈取開始後に疎植を判定すれば、オペレータに疎植された圃場での刈取中であることを知らせる手段S23を設けたことを特徴とするコンバインの自動方向制御装置とした。
(もっと読む)
作業機等の油圧制御回路
【課題】油圧制御ブロックを小さなブロックで分離可能にしてメンテナンスの能率を高める。
【解決手段】左側走行装置の駆動と制動を左操向クラッチシリンダ15Lと左走行ブレーキシリンダ18Lで制御し、右側走行装置の駆動と制動を右操向クラッチシリンダ15Rと右走行ブレーキシリンダ18Rで制御する回路であって、左操向クラッチシリンダ15Lと左走行ブレーキシリンダ18Lを制御する左クラッチ切換電磁弁14Lと左パイロット圧切換電磁弁16Lと左電磁比例弁17Lを一体に組み込んだ左油圧制御ブロック35Lと、右操向クラッチシリンダ15Rと右走行ブレーキシリンダ18Rを制御する右クラッチ切換電磁弁14Rと右パイロット圧切換電磁弁16Rと右電磁比例弁17Rを一体に組み込んだ右油圧制御ブロック35Rを各別の回路にする。
(もっと読む)
コンバイン
【課題】エンジンの動力を、左右の走行部に伝達する直進用変速機及び左右の走行部に逆回転して伝達する旋回用変速機と、前記直進用変速機の直進手動操作具と、前記旋回用変速機の旋回用手動操作具とを備えている走行車両において、その旋回操作機構の簡素化及び旋回操作性能の向上を図る。
【解決手段】直交する2つの軸線P、S回りに回動可能な制御体131を備え、この制御体は、前記旋回用手動操作具の旋回操作に伴う前記第1軸線P回りの正逆回動にて前記旋回用変速機を、旋回連動機構180を介して旋回作動させ、前記直進用手動操作具の変速操作に伴う前記第2軸線S回りの正逆回動にて前記直進用変速機を変速作動させるように構成され、前記旋回連動機構には、前記旋回用変速機を旋回作動する油圧シリンダ193を備えている。
(もっと読む)
1 - 20 / 123
[ Back to top ]