
Fターム[2B043EC14]の内容
農業機械一般(操向) (6,001) | 検出量の伝達又は処理 (391) | 検出量の処理と制御 (323) | 判定、判別又は比較 (120)
Fターム[2B043EC14]に分類される特許
1 - 20 / 120
走行車両
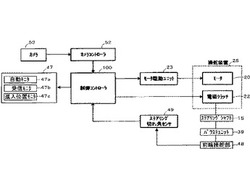
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
田植機

【課題】 本発明の課題は、植付部を適正に稼動することができる田植機を提供することにある。
【解決手段】 転向車輪と後輪とを備えて旋回走行可能な水田作業車の旋回動作信号と、同水田作業車に昇降可能に搭載されて均平用のフロートを備えた植付部の高さ位置信号とを受け、機体の旋回動作と対応して植付部の昇降調節と稼動を制御する制御処理部を備える田植機において、後輪を駆動する後輪伝動部(16)には、後輪車軸(3a)へ減速伝動する減速伝動部と、該減速伝動部よりも伝動上手側に設けた走行距離を算出するための回転センサ(16s)とを備え、旋回のためのハンドル操作又は植付切操作で走行の距離カウントを開始し、走行の距離カウントが所定の旋回走行距離に到達したときに植付部を稼動制御する制御装置を設けた。
(もっと読む)
苗移植機
【課題】レバー式植付操作機構に旋回連動機構を備える苗移植機において、植付昇降レバーの誤操作によることなく、植付部の安定動作を確保することができる苗移植機を提供する。
【解決手段】苗移植機は、走行車体を旋回操作する操舵部材(4)と、走行車体に昇降可能に支持した植付部(6)と、この植付部(6)の上昇、中立、下降、植付の順に切替え動作させる植付昇降レバー(8)と、上記操舵部材(4)による旋回の開始及び終了と連動して植付昇降レバー(8)を上昇と下降の位置に移動させる自動昇降機構(C)とを備えて構成され、上記植付部(6)の植付作業を検知する作業検知部材を設け、検知した作業が所定の継続範囲に該当しない場合に自動昇降機構(C)の作動を停止するものである。
(もっと読む)
水田作業機
【課題】水田作業機において、畦際での旋回終了を適切に検出する。
【解決手段】右の車輪2に動力を伝達する右のサイドクラッチ40と、左の車輪2に動力を伝達する左のサイドクラッチ40とを備える。操向操作自在な車輪1が直進位置A1側から右又は左の操向限度A3側に操向操作されると、右又は左のサイドクラッチ40が遮断状態に操作され、操向操作自在な車輪1が右又は左の操向限度A3側から直進位置A1側に操作されると、遮断状態に操作された右又は左のサイドクラッチ40が伝動状態に操作されるように構成する。車輪2の回転数に基づいて機体の前進及び後進の走行距離を検出する走行距離検出手段を備える。遮断状態に操作された右又は左のサイドクラッチ40が伝動状態に操作されたことと、走行距離検出手段で検出された機体の前進の走行距離と機体の後進の走行距離との差、とに基づいて旋回終了を検出する。
(もっと読む)
作業車両
【課題】作業者に負担を掛けないで、ブレーキペダルの連結と非連結を容易に切り替え可能であり、作業条件に合わせた操作が行える作業車両の提供である。
【解決手段】エンジンと前輪と後輪と苗植付部と左右のサイドクラッチと左右のサイドブレーキと左右のサイドクラッチ及び左右のサイドブレーキを操作可能な左右のブレーキペダル130と副変速レバーと副変速レバーセンサとを設けた走行車両に、左右のブレーキペダル130を連結又は非連結に切り替える切替装置140と、副変速レバーが高速時に切替装置140を作動して左右のブレーキペダル130を連結させる制御装置とを設ける。高速の直進走行時には、左右のブレーキペダル130が連結するため、停止操作が容易に行える。一方、低速時には、左右のブレーキペダル130が連結しないため、作業条件に合わせた操作が行える。
(もっと読む)
田植機
【課題】 本発明の課題は、機体旋回後の農作業装置の取扱いを可能な範囲で旋回動作と連動して自動処理することにより、オペレータの負荷を最小限度に抑えることができる自動植付作業車用制御装置を提供する点にある。
【解決手段】 旋回開始時のハンドル操作に基づいて後輪のドライブシャフト回転のカウントを開始し、植付部が下降状態で、その後の操舵ハンドルのハンドル角度が規定値以上でなく直進状態に戻した操作状態であることを条件に、更にその後、前記カウントが植付部を下降させたときの第一の所定値よりも大きい第二の所定値になったとき、植付クラッチを入にする連動制御を備え、植付部が下降状態で、その後の操舵ハンドルのハンドル角度が規定値以上であれば、連動制御を終了する制御装置を設けた田植機とした。
(もっと読む)
田植機
【課題】操作者が植付部に苗を補給している間であっても、苗を整列させて植付けることができる田植機を提供する。
【解決手段】CPUは、自動走行スイッチがオンになっている場合に、左右方向において、表示部に表示された線の中央と苗の列との距離を求め、求めた距離に応じた操舵量を演算する。操舵量を演算したCPUは、電磁切換弁201に切換信号を出力する。走行部1は、演算された操舵量だけ右又は左に操舵される。操舵終了後は、電磁切換弁201を中立位置に戻し、走行部を直進させる。
(もっと読む)
田植機
【課題】圃場の環境に左右されることなく、進行方向と苗の並び方向とを確実に整合させることができる田植機を提供する。
【解決手段】左フロントカメラ及び右フロントカメラ21にて圃場に植え付けられた苗を撮像し、撮像された苗を表示部8に表示する。操作者は、表示部8に表示された苗の並び方向を確認して田植機を操舵し、表示部8に表示された線を最も端に位置する苗の列に一致させて、進行方向と苗の並び方向とを整合させることができる構成とした。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記旋回量微調節手段の操作量に対応させて変更可能に構成した。旋回量微調節手段による走行機体の旋回量の調節量は、旋回量微調節手段の操作量に対応させて変更可能に構成しているため、オペレータは、旋回量微調節手段の操作量を変更することで、簡単に旋回量微調節手段による走行機体の旋回量の調節量を変更することができる。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記操向手段の操作量に対応させて変更可能に構成した。したがって、操向手段による旋回操作性を良好に確保した上で、更に旋回量微調節手段による補足的な操作を付加することができる。この際、調節量を操向手段の操作量に対応させて変更することで、操向手段による大雑把な旋回操作と旋回量微調節手段による補足的かつ微細な旋回操作を一体密接的に関連づけることができる。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記走行機体の速度に対応させて変更可能に構成した。したがって、操向手段による旋回操作性を良好に確保した上で、更に旋回量微調節手段による補足的な操作を付加することができる。この際、旋回量微調節手段による走行機体の旋回量の調節量を走行機体の速度に対応させて変更可能に構成しているため、かかる調節量を走行機体の速度に対応させて変更することで、種々の状況に即応させて走行機体の曲がり具合を変更することができる。
(もっと読む)
施肥装置
【課題】圃場の形状・寸法にかかわらず、効率性の高い走行経路の設定ができるとともに、走行経路の設定を行いながら連続的に施肥できるようにする。
【解決手段】第1設定点P1と第2設定点P2とを結ぶ基準線L0を設定する制御と、基準線L0と対向する平行な第2枕地走行経路L12を設定する制御と、第2枕地走行経路L12上に第3設定点P3を設定する制御と、第3設定点P3を設定することにより第2枕地走行経路L12の位置を設定する制御と、設定された第2枕地走行経路L12の位置に基づいて、第1枕地走行経路L11と第2枕地走行経路L12の間の距離を算出するとともに、第1枕地走行経路L11と第2枕地走行経路L12の間の施肥範囲B1中で施肥されてない範囲を算出し、枕地走行経路L1と内側走行経路L2を備えた走行経路Lを設定する。
(もっと読む)
苗移植機
【課題】予備苗載せ台を展開状態と収納状態とに切り替える際の作業者の労力や負担を軽減すると共に、作業能率が向上する苗移植機の提供である。
【解決手段】走行車体2の支持フレーム49に支持される複数の予備苗載せ台38と、予備苗載せ台38と支持フレーム49との間のリンク機構Kと、支持フレーム49に連結するアクチュエータ81と、アクチュエータ81及びリンク機構Kに連結する回転部材(70,82など)とを備え、予備苗載せ台38を展開状態と収納状態とに切り替える切替装置80と、切替装置80のスイッチ71と、スイッチ70のセンサ72と、ハンドル34の切れ角センサ33と、スイッチ71操作に応じてアクチュエータ81を作動すると共にハンドル34の操向角度が所定角度以上になると切替装置80のアクチュエータ81を駆動する制御装置100とを設けた苗移植機により、作業者の労力や負担を軽減し、作業能率が向上する。
(もっと読む)
農作業車の旋回開始位置設定装置及び旋回開始位置設定方法
【課題】農作業車が枕地において確実に旋回できる旋回開始位置を自動的、且つ確実に設定する。
【解決手段】GPSによる位置情報に基づいて、農作業車100の走行起点とする原点Pを設定する原点設定部1と、原点Pから直線状の基準線L1を設定する規準線設定部3と、原点Pからの移動距離を計測する移動距離計測部4と、農作業車100の実際の走行距離を計測する走行距離計測部5と、計測された移動距離と走行距離との差を算出する距離差算出部6と、農作業車100が旋回していると判定する旋回判定部7と、農作業車100の旋回が判定された位置に旋回判定点P2を設定する旋回判定点設定部8と、規準線L1上の任意の位置に直線基準点P3を設定する直線基準点設定部9と、旋回判定点P2から規準線L1に戻って、規準線L1上の距離差がない最終地点を検出し、この最終地点を旋回開始位置P4として設定する旋回開始位置設定部10とを備えた。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
作業車の車体状態切り換え構造
【課題】車体の状態を第1状態から第2状態に切り換える際の判断基準に創意工夫を凝らすことにより、作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】操舵輪の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備えた作業車の車体状態切り換え構造において、車体の走行速度を検出する車速センサ56を備え、車体状態切換手段48が、切角センサ55の検出、および、車速センサ56の検出に基づいて、車体の旋回角度を算出し、かつ、算出した旋回角度が設定角度を超えると、車体の状態を車体に連結した作業装置を機能させる作業用の第1状態から作業装置を機能させない移動用の第2状態に切り換えるように構成した。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域における作業車の位置を簡易な校正で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】角速度センサの出力に基づいて算出される進行方位に基づいて原動機を駆動して方位(地磁気)センサの出力に従って走行予定領域の境界を所定の起点から周回走行し、周回走行の間、算出される進行方位と走行距離を複数のビットに分割されてなるビットマップ上に順次記録して走行予定領域の境界線についての走行軌跡を生成し(S10からS14)、生成された走行軌跡を地図情報に変換し(S18)、地図情報のビットから作業車の位置を特定(検出)し、方位センサの出力から得られる規定方位を基準とし、算出される進行方位と走行距離と検出される位置とに基づき、作業車を直進走行させつつ、作業させる(S20)。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】ペダルやステアリングの操作状況に応じて生ずる芝の損傷を防止するとともに車両にかかる負担を軽減することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ペダル(後進アクセルペダル17及び前進アクセルペダル18)の操作量に応じて回転駆動され、ステアリングホイール16の操作量に応じて回転軸の角度が変更される車輪(前輪11a,11b及び後輪12)を備える車両であって、ペダルの操作量に基づいて目標とすべき車両の速度を算出する目標速度算出部38aと、車輪の回転軸の角度から車両の速度の制限値である車両速度制限値を設定する速度制限値設定部38bと、目標速度算出部38aの算出結果が車両速度制限値を超えている場合には、目標とすべき車両の速度を車両速度制限値に制限して車輪の回転駆動を制御するモータ制御部38cとを備える。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】ペダルやステアリングの操作状況に応じて生ずる芝の損傷を防止するとともに車両にかかる負担を軽減することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ステアリングホイール16の操作量に応じて回転軸の角度が変更される後輪12を備える車両であって、車両の速度を検出する速度センサ36と、ステアリングホイール16の操作量に基づいて目標とすべき後輪12の回転軸の角度である目標操舵輪角度を算出する目標操舵輪角度算出部38aと、速度センサ36の検出結果に応じて後輪12の回転軸の角度の制限値である操舵輪角度制限値を設定する操舵輪角度制限値設定部38bと、目標操舵輪角度が操舵輪角度制限値を超えている場合には、目標操舵輪角度を操舵輪角度制限値に設定して後輪12を制御するモータ制御部38cとを備える。
(もっと読む)
コンバイン
【課題】電動モータを駆動源とするコンバインにおいて、従来の旋回操作方法を変更することなく、急旋回や緩旋回等の旋回を行えるようにして、圃場作業における操縦性を高める。
【解決手段】左右のクローラ走行装置(3R,3L)を変速可能な左右の電動モータ(5R,5L)で夫々駆動すると共に該クローラ走行装置(3R,3L)を制動する左右のブレーキ(6R,6L)を設け、操縦席に立設する操向レバー(21)の左右傾倒角度に応じて該操向レバー(21)を傾倒した側の電動モータ(5R又は5L)の回転速度を減速させ、操向レバー(21)の傾倒角度が設定角度に達した場合にブレーキ(6R又は6L)を作動させて傾倒側のクローラ走行装置(3R又は3L)の回転を停止させる構成とする。
(もっと読む)
1 - 20 / 120
[ Back to top ]