
Fターム[2B062CA25]の内容
移植機(田植機の要素) (4,646) | 制御 (808) | 連動制御 (503) | センサーによる連動制御 (156)
Fターム[2B062CA25]に分類される特許
81 - 100 / 156
移植機
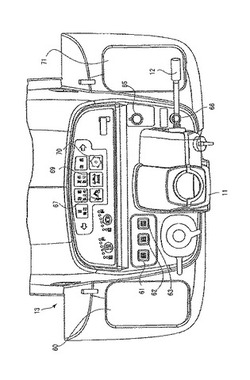
【課題】植付に係る複数の作業装置を統括的に操作し、オペレータの負担を軽減し得るようにした移植機を提供する。
【解決手段】乗用田植機に対し、圃場端である枕地における作業にあっては、植付部、油圧制御装置、整地装置、或いはマーカ等の複数の作業部が同時に、枕地での制御状態となるように設定又は警報する1個の枕地スイッチ63を備えさせた。これにより、枕地での植付作業時に生じる複数の作業部の操作を1個の枕地スイッチ63によって統括的に行うことができる。
(もっと読む)
農用作業車

【課題】GPSにより車体位置を計測しつつ、自律的に直進走行する農用作業車において、ティーチング経路を折れ線状や曲線状に生成することを可能とする技術を提供する。
【解決手段】GPSユニット102と、処理部110を備え、目標経路上を自律的に走行する田植機1であって、GPSユニット102により計測される位置情報に基づいて、ティーチング開始時から終了時まで、田植機1の車体位置を所定の間隔ごとに測定して、複数の車体位置(測定点Aから点G)を記録し、該記録に基づいて、走行した前後二つの測定点を直線で結ぶ線分の集合として、処理部110によりティーチング経路を生成し、該ティーチング経路に対して平行な目標経路を生成し、該平行な目標経路の線間距離は作業幅(即ち、植付幅aに植付条数bを乗じた距離(6a))とする。
(もっと読む)
作業車用制御装置
【課題】大廻り旋回についての確実な事前判定により、自動旋回制御に反映して大廻り旋回の影響を小さく抑えることができる作業車用制御装置を提供する。
【解決手段】作業車用制御装置は、旋回走行中の走行車輪の転動量に基づいて旋回行程の所定の基準位置nによる作業機動作制御を行う制御処理部21を備えて構成され、上記制御処理部21は、走行車輪の左右回転速度差が所定の基準値より小なる場合に、上記基準位置nを所定の補正処理した補正基準位置により作業機動作制御を行うように構成したものである。
(もっと読む)
水田作業機
【課題】 水田作業機において、アクチュエータにより右及び左のマーカーを作用姿勢及び格納姿勢に操作自在に構成して、オートマーカー機能を備えた場合、アクチュエータに大きな負担が掛からないように構成する。
【解決手段】 対地作業装置5が上昇駆動されると、作用姿勢の右又は左の一方のマーカー19が格納姿勢に操作され、対地作業装置5が下降駆動されると、格納姿勢の右又は左の他方のマーカー19が作用姿勢に操作されるように、アクチュエータを作動させる制御手段(オートマーカー機能)を備える。対地作業装置5が機体に対する所定低位置よりも上方に位置していると、格納姿勢の右又は左の他方のマーカー19が作用姿勢に操作されることを阻止し、対地作業装置5が所定低位置に下降駆動されると又は所定低位置を越えて下降駆動されると、格納姿勢の右又は左の他方のマーカー19が作用姿勢に操作されることを許容する牽制手段を備える。
(もっと読む)
農作業機
【課題】 従来、走行車体の後進時に農作業装置が上昇するようになっているため、農作業装置の接地作業状態でのひきづりが発生し安全上に問題があった。本発明は、後進操作前に農作業装置を上昇させることによって、農作業装置のひきづりを防止し安全性を確保することにある。
【解決手段】 走行車体の後部に農作業装置を昇降可能に設け、前後進切替可能な操作レバー40の操作経路を一方向に延びる前後進中立経路41Nと、前後進中立経路に交差して接続される前進経路41F及び後進経路41Rとを備え、前進経路41Fと後進経路41Rとが前後進中立経路41Nに交差する位置を異ならせてクランク状に構成し、前後進中立経路41Nの後進経路41R側端部は、後進経路41Rと交差する位置を越える位置にあり、該位置には前記操作レバー40が操作されたことを検出する検出手段42の検出結果に基づいて農作業装置を上昇させる制御手段44を備える。
(もっと読む)
農作業機
【課題】 走行機体にローリング可能に連結した作業装置を駆動機構によってローリング作動させるとともに、作業装置あるいは走行機体の左右傾斜検出情報に基づいて駆動機構を作動させて、作業装置の対地ローリング姿勢を設定姿勢に修正維持するローリング制御手段を備えた農作業機において、作業装置の左右での重量バランスの崩れや、作業装置自体の重量変動などにかかわらず、応答遅れの少ないローリング制御を行えるようにする。
【解決手段】 作業装置の重量状況を検知する手段を備え、作業装置をローリング作動させる駆動機構の作動速度を検知された重量情報に基づいて変更制御する。
(もっと読む)
乗用型田植機
【課題】 走行機体に苗植付け装置を連結するとともに、苗植付け装置に備えられた検出手段からの情報に基づいて作動する報知手段を走行機体に設けた乗用型田植機において、あって、付設した作業装置で検知された状況を走行機体の搭乗運転者が容易に認識して、直ちに作業装置に必要な措置をとることができるようにする。
【解決手段】 苗植付け装置に脱着可能に取付けられる作業装置、あるいは、苗植付け装置と取替えられて走行機体に連結される作業装置に、該作業装置における特定作動状況を検出する検出手段を設け、作業装置における特定作動状況の検出情報に基づいて走行機体の報知手段を作動可能に構成する。
(もっと読む)
水田作業機
【課題】 マーカの姿勢切り換えを電動モータの駆動で行う水田作業機において、マーカの損傷を回避するとともに、マーカの出し忘れを防止し作業性を向上する。
【解決手段】 電動モータ42の駆動によって作用姿勢と格納姿勢とに姿勢切り換え自在なマーカ20を備えた水田作業機において、作業装置10の高さが所定高さ以上の高さで人為操作具61の作用姿勢への切り替え指令が入力されてもマーカ操作機構40の作用姿勢側への作動を阻止する牽制手段71と、牽制手段71によりマーカ操作機構40の作用姿勢側への作動が阻止されても作業装置10の高さが所定高さ以下の高さになればマーカ操作機構40の作用姿勢側への作動を開始するマーカ作用制御手段72とを備える。
(もっと読む)
移植機
【課題】整地ロータを油圧モータの駆動力で回転させる移植機において、油圧ポンプの兼用化によりコストダウンを図る。また、同一の油圧ポンプが用いられる複数の油圧回路を効率良く作動させることにより、油圧回路の複雑化や油圧ポンプの容量アップを回避する。
【解決手段】油圧モータ22の駆動力で回転する整地ロータ14を備える乗用型田植機において、整地ロータ用油圧回路26を、整地ロータ14と同時作動しないパワーステアリング用油圧回路25と同一の油圧回路に組み込み、パワーステアリング用油圧ポンプ31を整地ロータ用油圧ポンプに兼用する。
(もっと読む)
水田作業機
【課題】 水田作業装置及び対地作業装置を備えた水田作業機において、対地作業装置の作業性を向上させる。
【解決手段】 対地作業装置53をアクチュエータ56により昇降駆動自在に支持する。人為的に操作自在な人為操作具を備える。対地作業装置53が田面Gから上方の上方位置に位置する上昇状態、及び対地作業装置53た田面Gに接地可能な下方位置に位置する下降状態を、人為操作具により設定可能に構成する。人為操作具により下降状態が設定された状態で、非作業状態であると対地作業装置53が上方位置に位置するようにアクチュエータ56を作動させ、作業状態であると対地作業装置53が下方位置に位置するようにアクチュエータ56を作動させる。
(もっと読む)
乗用型田植機
【課題】 乗用型田植機において、苗植付装置の前部に整地装置を支持した場合、植付設定高さを変更しても(設定深さを変更しても)、田面から整地装置までの高さ(整地深さ)が変化しないように構成する。
【解決手段】 整地装置53を苗植付装置の前部に昇降自在に支持し、整地装置53を苗植付装置に対して昇降駆動するアクチュエータ56を備える。苗植付装置の植付設定高さA1の変更に基づいて、整地装置53が田面Gから整地設定高さA2に維持されるようにアクチュエータ56を作動させる。
(もっと読む)
移植機
【課題】 整地ロータが静止した状態で圃場内を引き回し、整地ロータにより圃場の表層部を荒らす泥押しなどを防止するようにした移植機を提供する。
【解決手段】 該植付装置に昇降自在に支持され、かつ前記植付装置の伝動系から動力伝達される整地装置を備えてなる移植機において、前記植付装置が植付け位置にあることを検出するリフト角ポテンショメータ125と、植付けクラッチのオン・オフを検出する油圧カムポテンショメータ48と、前記整地装置が整地位置にあることを検出する整地装置操作レバースイッチ93と、警報ブザー127と、前記各検出手段125、48、93に基づき、前記植付装置が植付位置にあり、前記植付クラッチが切状態であり、かつ前記整地装置が整地位置にあることを検出すると、前記警報手段127が警報作動するように制御する制御手段121とを備えた。
(もっと読む)
植え付け作業機の昇降制御構造
【課題】 部品レイアウトに苦慮することなく、又、コストの高騰並びに組み付け性やメンテナンス性の低下を招くことなく、植え付け深さ調節にかかわらず、自動昇降制御において、苗植付装置を予め設定した接地高さ位置に精度良く維持できるようにする。
【解決手段】 操作手段51により、植付機構16に対する接地体17の高さ位置を変更することで植え付け深さが調節され、制御手段40が、揺動角度検出手段54で検出される接地体17の検出角度θbが予め設定した制御目標角度θoと一致するように、苗植付装置昇降用のアクチュエータ2の作動を制御することで、苗植付装置4が予め設定した接地高さ位置に維持されるように構成した植え付け作業機の昇降制御構造おいて、植え付け深さ調節に連動して、揺動角度検出手段54の検出角度θbを補正する補正手段64を備えてある。
(もっと読む)
乗用型苗植機
【課題】実際の田植作業では昇降制御のセンサーである整地フロートはローリング制御による苗植装置の傾斜修正作動にて泥面から押上げ力を受けて上動する為に、苗植装置は上昇作動してしまい、苗の植付け深さが浅くなって苗が浅植えになったり植付けられなかったりする事態が発生した。
【解決手段】苗植装置25に設けた接地センサー32の接地圧が所定値に維持されるように昇降駆動装置28を制御する昇降制御手段と、苗植装置25の左右傾斜角度を検出する傾斜センサー64の検出値が所定値に維持されるようにローリング駆動装置60を制御するローリング制御手段とを備え、該ローリング制御手段によるローリング駆動装置60の作動中または作動中及び作動後の所定時間は昇降制御手段による苗植装置25を昇降駆動装置28にて上昇作動させる制御を牽制する制御装置51を設けた乗用型苗植機。
(もっと読む)
乗用型田植機
【課題】 乗用型田植機において、電動モータにより所望の少数条クラッチが作動及び停止状態に操作されるように構成する場合、人為操作具の右及び左用操作経路の配置スペースをコンパクトに構成し、人為操作具の操作位置の検出構造を簡素に構成する。
【解決手段】 全条作動位置ON、全条作動位置ONから同じ方向に延出された右及び左用操作経路79,80を備え、全条作動位置ON、右及び左用操作経路79,80での人為操作具50の操作位置を検出する検出装置を備える。全条作動位置ON、右及び左用操作経路79,80での検出装置の検出信号が全て異なるように構成する。検出装置の検出信号に基づいて、人為操作具50を全条作動位置ONから右用操作経路79(左用操作経路80に操作していくと右(左)の少数条クラッチから停止状態に順次操作されるように構成する。
(もっと読む)
移植機
【課題】フロートを不要にして植付作業機の軽量化や小型化を可能にするものでありながら、植付作業機の植付深さや整地装置の作用深さを調節できるようにする。
【解決手段】走行機体1の後部に昇降自在に連結され、圃場に苗を植付ける植付作業機7と、該植付作業機7の前部に設けられ、苗植付位置の前方で整地を行う整地装置14とを備える乗用田植機であって、整地装置14の後部に上下回動自在に設けられ、圃場面に追従して上下回動するリヤカバー22と、該リヤカバー22の回動角に基づいて植付作業機7の対地高さを検出するリヤカバーセンサ23と、該リヤカバーセンサ23の検出値に基づいて植付作業機7を昇降制御する制御部28とを備えると共に、整地装置14を植付作業機7に対して昇降自在に支持する。
(もっと読む)
移植機
【課題】植付作業機の軽量化や小型化が図れるだけでなく、フロートによるスペースの圧迫を解消し、整地装置などのレイアウトを容易にする。
【解決手段】走行機体1の後部に昇降自在に連結され、圃場に苗を植付ける植付作業機7と、該植付作業機7の前部に設けられ、苗植付位置の前方で整地を行う整地装置16とを備える乗用田植機において、整地装置16の後部に、植付作業機7の植付深さ変化に応じて上下回動するリヤカバー25を設けると共に、リヤカバー25の回動角を検出するリヤカバーセンサ25を設け、該リヤカバーセンサ25の検出値に基づいて植付作業機7を自動的に昇降制御することにより、植付作業機7の植付深さ(対地高さ)を一定に保つ。
(もっと読む)
移植機
【課題】運転席外の移植機周辺にいる作業者が苗切れや肥料切れを容易に認識することができる移植機を提供することを課題としている。
【解決手段】苗の植付けを行う植付作業機8と、圃場に肥料の施肥を行う施肥機構とを備えた移植機に、植付作業機8の両側端部に設けられたランプを備えてなる植付け用の苗の苗切れを報知する苗切れ報知手段と、施肥用の肥料の肥料切れを報知する肥料切れ報知手段とを設けた。上記ランプを植付作業機8の両側端部に設けたウインカランプ16に兼用させた。
(もっと読む)
乗用型苗移植機
【課題】旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】左右前輪6を所定角度以上に操向操作すると苗移植作業装置3を上昇させる指令を出力して苗移植作業装置3を上昇させ、且つ、走行距離算出手段にて走行距離を算出して、該走行距離に応じて苗移植作業装置3が下降する指令を出力する自動旋回制御を行なうと共に、マーカ作動操作具220の左右線引きマーカ195の作動を停止させる操作にて該自動旋回制御を行わない状態に切り替える制御装置170を設けた乗用型苗移植機。
(もっと読む)
作業車両
【課題】作業車両の走行中及び走行車体に連結される作業装置の実作動時間を正確にカウントして作業時間の計測を行うことができる作業車両を提供すること。
【解決手段】作業時間(実際にエンジン20が駆動している状態、作業車両1が作動している状態又は苗植付部4の苗植付装置52が作動している状態にある時間)を計測する作業時間カウンターを備え、(1)走行車体2の走行停止状態に連動して作業時間カウンターによる作業時間の計測を中断させるか、(2)エンジン20の非駆動状態に連動させて作業時間カウンターの作業時間の計測を中断させるか、又は(3)苗植付部4の苗植付装置52の作動停止状態に連動させて作業時間カウンターの計測を中断させる制御装置100を備えたエンジン20を搭載して走行する走行車体2と該車体2に連結した苗植付部4を備えた作業車両である。
(もっと読む)
81 - 100 / 156
[ Back to top ]