
Fターム[2B062CA25]の内容
移植機(田植機の要素) (4,646) | 制御 (808) | 連動制御 (503) | センサーによる連動制御 (156)
Fターム[2B062CA25]に分類される特許
21 - 40 / 156
苗移植機
【課題】
苗載せ台を畦際側とは反対側へ移動させるときは、苗植機の走行を直ちに停止して、植付装置の植付操作を停止して、苗タンクを目的の方向へ大きく移動させて、苗移植機の旋回操作等を行わせる。又、この一旦横端へ移動させていた苗タンクを移動前の苗植付停止位置に戻してから、苗移植機の植付動作を行わせる必要があり、煩雑で正確な操作を要し、相当の時間と熟練を要する。
【解決手段】
植付装置3の伝動を停止した状態で苗タンク2を横端へ移動させるときの、摺動軸1の横送回転数をタンク送りセンサ6で検出し、この苗タンク2が横端に移動した後に前記苗植作用を開始するときは、前記タンク送りセンサ6が検出した横送回転数に基づいて摺動軸1を伝動回転して、前回苗植停止位置に苗タンク2を移動復帰する構成とする。
(もっと読む)
田植機

【課題】圃場の環境に左右されることなく、進行方向と苗の並び方向とを確実に整合させることができる田植機を提供する。
【解決手段】左フロントカメラ及び右フロントカメラ21にて圃場に植え付けられた苗を撮像し、撮像された苗を表示部8に表示する。操作者は、表示部8に表示された苗の並び方向を確認して田植機を操舵し、表示部8に表示された線を最も端に位置する苗の列に一致させて、進行方向と苗の並び方向とを整合させることができる構成とした。
(もっと読む)
田植機
【課題】苗載台を正確に苗台端位置に移動させて、欠株を防止することができる田植機を提供することである。
【解決手段】苗載台41を苗台端位置に移動させる信号が入力されると、苗載台41が第一所定速度で移動するように変速モータ71を駆動制御して、苗台位置検出により前記苗載台41が前記苗台端位置より手前の所定位置に到達したことを検出すると、前記植付クラッチ55が「切」となるように植付クラッチモータ73を駆動制御するとともに、前記苗載台41が前記第一所定速度よりも遅い第二所定速度で移動するように変速モータ71を駆動制御するものである。
(もっと読む)
苗移植機
【課題】移植装置の植付設定について、煩わしい切替え操作を要することなしに、食害対応のための変更調節を適切に行うことができる苗移植機を提供する。
【解決手段】苗移植機は、機体走行と連動して苗マットから苗株を取出して圃場に植え付ける移植装置(6)と、株間切替装置(22)と、苗取量調節装置(21)とを設けて構成され、上記移植装置(6)は、株間切替装置(22)および苗取量調節装置(21)をそれぞれ駆動するアクチュエータ(22a,21a)とその駆動を制御する制御装置(31)とによって圃場苗の食害に対抗可能な所定の株間および苗取量による食害対抗植付に設定切替え可能に構成するとともに、畦際への接近を検出する畦際検出手段(23)を設け、植付け位置が畦に沿う所定の近接範囲内であることを設定切替条件として移植装置(6)の設定を食害対抗植付に切替えるものである。
(もっと読む)
苗移植機
【課題】ぬかるみやすい圃場における安定走行の確保とともに、ぬかるみにくい圃場における燃費向上および排ガス低減を可能とする苗移植機を提供する。
【解決手段】苗移植機は、エンジン(5)の動力を変速して走行装置(2,3)および苗移植装置(6)に伝動する変速伝動装置(4)、変速レバー(4a)の指示に応じてエンジン(5)および変速伝動装置(4)を動作制御する制御装置(11a)等を設けて植付け走行可能に構成され、上記制御装置(11a)は、変速レバー(4a)の指示に対するエンジン回転の動力特性が、低燃費走行用の低回転モード(L)と、通常の回転による標準モード(M)と、ぬかるみ走行用の高回転モード(H)のいずれかを選択可能に構成するとともに、変速レバー(4a)の指示が停車時の停止速および発進直後の低速域の範囲について高回転モード(H)を適用するものである。
(もっと読む)
苗移植機
【課題】 本発明は、苗植付部の前後傾斜姿勢の制御は高精度で適正に行うことを課題とする。
【解決手段】 機体の走行の加減速を検出する走行加速度センサ(222)を設け、該走行加速度センサ(222)の検出に基づき、走行が加速されているときには苗植付部(4)を後上がり側へ前後傾斜させるべく前後傾斜用アクチュエータ(203)を作動させ、走行が減速されているときには苗植付部(4)を後下がり側へ前後傾斜させるべく前後傾斜用アクチュエータ(203)を作動させる制御装置を設けた苗移植機とした。
(もっと読む)
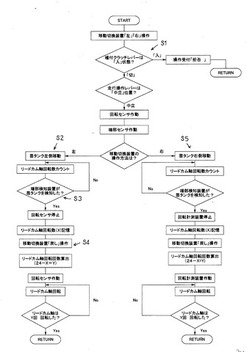
苗移植機
【課題】予備苗載せ台を展開状態と収納状態とに切り替える際の作業者の労力や負担を軽減すると共に、作業能率が向上する苗移植機の提供である。
【解決手段】走行車体2の支持フレーム49に支持される複数の予備苗載せ台38と、予備苗載せ台38と支持フレーム49との間のリンク機構Kと、支持フレーム49に連結するアクチュエータ81と、アクチュエータ81及びリンク機構Kに連結する回転部材(70,82など)とを備え、予備苗載せ台38を展開状態と収納状態とに切り替える切替装置80と、切替装置80のスイッチ71と、スイッチ70のセンサ72と、ハンドル34の切れ角センサ33と、スイッチ71操作に応じてアクチュエータ81を作動すると共にハンドル34の操向角度が所定角度以上になると切替装置80のアクチュエータ81を駆動する制御装置100とを設けた苗移植機により、作業者の労力や負担を軽減し、作業能率が向上する。
(もっと読む)
苗移植機
【課題】
畦際の旋回痕を整地ロータで充分に均し、圃場均平用フロートで均平にすることで、畦際での苗の植付深さを揃える苗移植機を提供することにある。
【解決手段】
走行車体2の後部に整地ロータ27とフロート55,56と苗植付装置52を設けた苗植機において、左右の整地ロータ27a,27bをそれぞれ独立昇降自在に構成し、畦際での植付作業を検出する畦際検出部材SAを設け、畦際検出部材SAで検出した畦側の整地ロータ27a,27bを反対側の整地ロータ27a,27bよりも下方へ降下させ、畦際検出部材SAを、左右の畦クラッチレバー71,71の操作を検知する左右の畦クラッチスイッチ71a,71bで構成し、左右の畦クラッチスイッチ71a,71bを操作すると左右の整地ロータ27a,27bのいずれか一方を下方に下降させる構成とする。
(もっと読む)
田植機
【課題】高速走行時における植付部の振動及び騒音を低減させるとともに、高速走行時においても苗をきれいに植え付けることができる田植機を提供する。
【解決手段】田植機は、不等速変速部25と、植付部、回転センサ43と、制御部45と、を備えている。不等速変速部25は、エンジン10からの回転駆動力を不等速回転駆動力に変換して出力する。植付部は、不等速変速部25が出力する不等速回転駆動力によって植付爪22を駆動して苗の植え付けを行う。回転センサ43は、不等速変速部25から植付爪22まで駆動力を伝達する伝動系に発生し得るガタやねじれの大きさを検出する。また、不等速変速部25は、当該不等速変速部25が出力する不等速回転駆動力の加速度及び減速度を変更可能に構成される。そして、制御部45は、回転センサ43が検出した前記伝動系のガタやねじれが大きくなるに従って、不等速変速部25の加速度及び減速度を小さくする。
(もっと読む)
苗移植機
【課題】作業者が労力を費やすことなく「展開状態」と「収納状態」との切り替えを行うことができ、切替作業中であっても他の作業を中断せずにすみ、作業能率を向上することが可能な苗移植機を提供する。
【解決手段】第1〜3予備苗載台38a〜38cが前後一列に並んだ「展開状態」と、上下多段に並んだ「収納状態」とを第1〜3移動リンク部材39a〜39cにより切替可能な予備苗載台と、駆動力が与えられると、回動軸ax1,ax2を中心に第1〜3移動リンク部材39a〜39cを回動させる回動ギア300gと、回動ギア300gに駆動力を与える切替モータ300mとを設けた。
(もっと読む)
苗移植機
【課題】後進した後で苗の植付を開始する場合に、苗が植えられていない圃場領域をなくした苗移植機を提供すること。
【解決手段】走行車両1の後部の苗植付装置3と変速操作レバー17と植付速、中立速及び移動速に切替操作する植付操作レバー26と植付操作レバー26の操作に従って移動速、中立速と植付速にそれぞれ切り替える作業シフタ56を設け、苗植付装置3の上昇または下降を検出する上下動センサ48と植付操作レバー26の操作位置を検出するセンサ50と変速操作レバー17が前進位置または後進位置にあることを検出するセンサ52の信号により制御装置100が苗植付装置3の上昇状態でかつ車両1が後進中であることを検知すると植付具41を作動させる作業シフタ56を中立状態に切り替える切替モータ57を設け、前進時に苗の植付を速やかに行うことがきるので、苗を植え付け損なった箇所に手作業で苗を植え直す必要がなくなり、作業者の労力が軽減される。
(もっと読む)
移植機
【課題】電動ステアリング機構と、電動ステアリング機構を介した操向制御を行う制御部を備え、直進走行後に走行機体を旋回させるための操向操作を自動的に行う自動旋回制御を行うにあたり、オペレータの意図に沿って自動旋回制御を実行する移植機を提供することを課題とする。
【解決手段】本発明は、電動ステアリング機構34と、電動ステアリング機構34を介した操向制御を行う制御部21とを備え、制御部21が、直進走行後に走行機体4を旋回させるための操向操作を自動的に行う自動旋回制御を行う移植機であって、走行機体4の旋回方向を選択する操作を検出する操作検出手段を設け、制御部21は、操作検出手段によって旋回方向の選択操作が検出されたことを少なくとも1つの条件とし、畦際での旋回である小回り旋回が可能な切れ角になるまで該選択された旋回方向に電動ステアリング機構34を自動的に操向作動させる自動旋回制御を実行する。
(もっと読む)
水田作業機
【課題】エンジンによる燃料の無駄な消費を抑制したり、騒音の低減を図ることが可能となるものでありながら、エンジンが停止している状態でバッテリーの充電量が大幅に低下することを回避することが可能な水田作業機を提供する。
【解決手段】キースイッチ90がオン操作されている状態において、エンジン12の作動を停止させるエンジン自動停止処理、及び、エンジン12の作動を停止させたのちにエンジン12を始動させるエンジン自動始動処理を実行する制御装置Hが、エンジン自動停止処理を実行したのちにおいてもバッテリーVから機体各部への電力供給を維持し、且つ、エンジン自動停止処理を実行してからエンジン自動始動処理を実行しない状態が設定時間以上継続すると、バッテリーVから機体各部への電力供給状態を電力消費が無い省電力状態に切り換える電力供給状態切換処理を実行するように構成されている。
(もっと読む)
水田作業機
【課題】エンジンを停止させることが適切ではない場合にエンジン自動停止制御を実行することによる不都合を回避しながら、燃料消費の抑制や騒音の低減を図ることが可能な水田作業機を提供する。
【解決手段】機体各部の作動を制御する制御手段が、牽制条件が成立していれば、エンジン停止条件が成立してもエンジン自動停止制御を実行しないように構成され、牽制条件が、作業装置が田面よりも上方に位置しているという条件、走行機体又は作業装置が水平面から設定傾斜角以上傾斜しているという条件、作業装置に備えられた左右両側のマーカーが夫々収納状態であるという条件、及び、走行用の変速装置が水田作業用変速状態とは別の変速状態に切り換えられているという条件、のうちの少なくもいずれか1つの条件である。
(もっと読む)
作業車両
【課題】
土壌状態に合わせてエンジンの燃料噴射量を変更し、安定した土壌ではエンジンの回転数を減少させて燃費を向上させると共に、不安定な圃場ではエンジンの回転数を増大させて走行姿勢を安定させることのできる作業車両を提供する。
【解決手段】
左右の前輪6,6と左右の後輪7,7により圃場を走行する走行車体9にエンジン8を設け、走行車体9の後部に圃場に苗を植え付ける植付部5を設けた作業車両において、走行する土壌の状態を検出する土壌センサ10を設け、土壌センサ10が検出した土壌状態に合わせてエンジン8の燃料の噴射量を増減制御する構成とし、土壌センサ10の下部に、土壌センサ10の検出面11に間欠的に接触して付着物を除去する清掃部材12を設ける。
(もっと読む)
苗移植機
【課題】
圃場に凹凸がある度に植付部の植付深さが変更されると、かえって苗の植付深さが不安定になるため、機体が設定値以上傾斜するとアクチュエータの制御弁の作動時間が長くなる制御を行なう。
【解決手段】
苗を圃場に植え付ける植付装置4を備えた植付部5を走行車体8の後部に設け、植付部5を昇降させるアクチュエータ9を設け、センタフロート1の上下揺動によってアクチュエータ9の制御弁10を切り替えて植付部5を昇降させ、苗の植付深さを所定深さに維持する植付昇降制御可能に構成した苗移植機において、走行車体8に傾斜センサ11を設け、傾斜センサ11が検知する走行車体8の前後方向の設定値以上の傾斜を検出するとこの検出値から制御弁10を出力作動するまでの間の応答時間を長くする制御を行なう構成とする。
(もっと読む)
苗移植機
【課題】
走行車体が左右方向に傾斜すると、苗植装置が圃場面に対して略左右水平姿勢となるようにローリング駆動させ、苗の植付姿勢を安定させる苗移植機を提供する。
【解決手段】
圃場を走行する走行車体2の後部に苗を積載する苗載せ台4と、苗載せ台4の下部に苗載せ台4から苗を取って圃場に植える植付装置5からなる苗植装置6を設け、苗植装置6の傾斜量を検出する傾斜検知部材53を設け、傾斜検知部材53の検知に合わせて苗植装置6を左右方向に回動させるローリング機構Rを設けた苗移植機において、走行車体2に圃場の凹凸に対応して上下回動するローリング機構R2を設け、走行ローリング機構R2に所定量以上の回動を検知する走行ローリング検知部材49L,49Rを設け、走行ローリング検知部材49L,49Rが所定量以上の回動を検知したとき、ローリング機構Rの作動速度を減速させる構成とする。
(もっと読む)
苗移植機
【課題】本発明では、作業時の燃料消費を抑えた、低燃費の苗移植機を提供することを課題とする。
【解決手段】
走行車体2にエンジン20と油圧無段変速装置23を設け、走行車体2の後部に圃場に苗を植え付ける苗植付装置52を設け、油圧無段変速装置23の出力を切り替えて機体の前後進及び走行速度を操作する変速操作レバー8を設けた苗移植機において、油圧無段変速装置23に駆動容量を変更可能な可変アクチュエータ29を設け、走行車体2の走行状態を検知する第1走行検知部材14と第2走行検知部材9を設け、第1走行検知部材14の検知する走行状態に合わせて可変アクチュエータ29の駆動容量とエンジン20の回転数を制御する制御装置6を設けて構成する。
(もっと読む)
苗移植機
【課題】フロートの前側に夾雑物が溜まることがあっても、苗の植え付け深さを適正に行うことができる苗移植機を提供すること。
【解決手段】センターロータ27bのカバー37の後端部を開閉可能にし、カバー37の後端部に回動自在に取り付けられた回動角度センサ39aにより作業中に接触体39が開閉したことを検知すると接触体39に夾雑物が引っかかったと判断し、油圧バルブ48が昇降油圧シリンダ46を伸張させて苗植付部4を上昇させる。これによりフロート55,56と圃場面との間に空間部が生じて夾雑物がフロート55,56に引っかかることを防止できるて苗の植付深さが正確に検知されて植付精度が向上し、フロート55,56に引っかかった夾雑物を取り除く作業が必要無くなり作業能率が向上する。また、昇降用油圧シリンダ46の伸縮制御感度を敏感側にして苗植付部4を瞬間的に浮かせることで整地ロータ27aが夾雑物を乗り越えることができるようにする。
(もっと読む)
苗移植機
【課題】 旋回時、植え付け装置を機械的に自動上昇させる、安価な苗移植機の実現。
【解決手段】 走行車体2の車輪10の方向を制御するピットマンアーム60と、走行車体2の後側に設けられ、昇降油圧シリンダによって昇降させられる植え付け装置と、植え付け装置の昇降、植え付けを設定するための植え付け昇降レバー33と、昇降レバー33の操作に従って、昇降油圧シリンダを制御するカム74、位置決めローラ77等と、ピットマンアーム60に連結された連繋部材61、62、64、71と、連繋部材61、62、64、71に連結された旋回切替操作具73とを備え、旋回切替操作具73は、操舵部材が所定量以上回動すると、カム74、ローラ77などを機械的に駆動することによって植え付け装置52を上昇させるモードと、操舵部材が所定量以上回動しても、カム74、ローラ77などを駆動しないモードが選択出来る。
(もっと読む)
21 - 40 / 156
[ Back to top ]