
Fターム[2B304LA10]の内容
Fターム[2B304LA10]に分類される特許
1 - 20 / 21
トラクター直装式ブームスプレーヤ
【課題】 ブームが実際に傾斜した場合にそのブームを速やかに、かつ適正に回動制御して迅速な傾斜角度の補正ができるトラクター直装式ブームスプレーヤを提供する。
【解決手段】 ブーム4が基部フレーム3に対してその重心近傍で回動自在に支持されているとともに、ブーム4を正逆方向に回動させるブーム回動手段8と、前輪車軸24の車体21に対する相対的な傾斜角度を計測する前輪傾斜角度計測手段9と、走行面の凹凸により後輪が傾斜する前に、前輪車軸の相対的な傾斜角度の方向と反対方向にブーム4を回動させるための準備をブーム回動手段8に実行させるブーム回動準備制御手段11と、ブーム4の基部フレーム3に対する相対的な傾斜角度を計測するブーム傾斜角度計測手段10と、ブーム4の相対的な傾斜角度が所定の範囲を超えた場合、回動準備中のブーム回動手段8を駆動してブーム4を制御するブーム回動制御手段12とを有する。
(もっと読む)
作業機

【課題】複数の表示装置を備えていても、表示装置の種類(機種)や仕様の変更を容易に行うことができる作業機を提供する。
【解決手段】トラクタ2は、検出器で検出した状態を表示可能な複数の表示装置(メータパネル30及び液晶モニタ80)と、該複数の表示装置がCAN通信網Nを介して接続されると共に検出器が接続され、且つ検出器で検出された状態を示す検出情報を複数の表示装置に出力するメインECU50と、を備える。メインECU50は、検出情報を表示させる表示装置を識別するための識別情報を出力する識別情報出力手段52と、該検出情報を出力する検出情報出力手段51とを有する。複数の表示装置は、識別情報によって指定されたときに、検出情報出力手段51によって出力された検出情報を表示する。
(もっと読む)
薬液散布作業車両
【課題】旋回時などに散布ブームを障害物に接触させないように、自動的に昇降制御が可能な薬剤散布作業車両を提供することである。
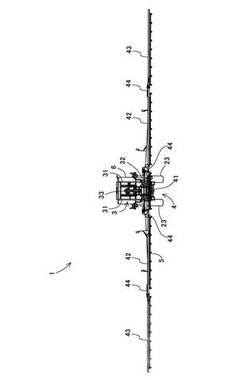
【解決手段】薬液タンク18からの薬液を圃場に散布するセンターブーム43と左右のサイドブーム44と左右のサイドブーム44の上下動をそれぞれ行うための上下シリンダ29と左右の車輪12及び/又は13)の切れ角を検出するタイヤ切れ角センサ46と車輪(12又は13)の回転数を検出する車速センサ6とタイヤ切れ角センサ46の旋回角度の検知により自動的に旋回外側のサイドブーム44の上下動を行い、該サイドブーム44の上げ速度は車速センサ6の検出値に基づき決める制御装置100を備えた薬液散布作業車両である。
(もっと読む)
薬液散布作業車両
【課題】旋回時又は旋回終了時に旋回外側のサイドブームを自動的に上昇又は下降させる制御を安全性を考慮して可能にした薬剤散布作業車両を提供すること。
【解決手段】GPS受信機81から得られる車速又は車輪12又は13の回転数から得られる車速により適切な薬液散布量となるように薬液タンク18からの薬液流量を流量制御モータ10により流量調節弁73の開度を調整する。このとき車輪12及び/又は13の操舵角の検知により自動的に旋回外側のサイドブーム44の上昇を行い、また前記車速が所定値以上になると旋回外側のサイドブーム44の自動上昇を行わない制御を行うことで、高速走行時にサイドブーム44の破損等の不具合を防止できる。
(もっと読む)
薬剤散布車の散布制御装置
【課題】左右のブームをそれぞれ昇降可能に備えて薬剤散布する際の機体旋回後の散布再開に伴う作業者の負荷軽減を可能とする薬剤散布車の散布制御装置を提供する。
【解決手段】薬剤散布車の散布制御装置は、直線散布走行から旋回走行により隣接域に移行して逆方向の直線散布走行を開始する薬剤散布車に薬剤散布用の左右のブーム(9b,9b)を昇降可能に備え、これら左右のブーム(9b,9b)を低位散布のための作業位置と高位待避のための非作業位置にそれぞれ切替え可能に構成され、直線散布走行中に所定の旋回判定舵角以上となる1回目の舵角検出によってその旋回外側のブーム(9b)を非作業位置に切替え制御し、これに続く同側の旋回判定舵角以上となる2回目の舵角検出によって旋回終了と判定し、この旋回終了の判定によって上記ブーム(9b)を作業位置に切替える制御処理を設けたものである。
(もっと読む)
散布作業車
【課題】薬液タンクを機体後部に備えた散布作業車において、機体後部に設けている作業機昇降用の昇降リンクを利用し、薬液タンクの据付け作業を一人の作業者でできるようにする。
【解決手段】左右昇降リンクの先端部に前記薬液タンクの底面前側部を取り付け可能に構成し、後側部を下方に前側部を上方にしている接地状態の前記薬液タンクの底面前側部を後側下方に下降回動している左右昇降リンクの先端部に連結し、左右昇降リンクを前側上方に回動し薬液タンクを持ち上げ、薬液タンクの底面後側部が走行車体の据付け面に到達すると、左右昇降リンクから薬液タンクを取り外し、次いで、左右昇降リンクの先端部で薬液タンクの底面を下側から支持しながら下降回動し据付け状態に移動するようにしたことを特徴とする散布作業車の構成とする。
(もっと読む)
ブームスプレーヤ
【課題】センタブームの昇降移動やサイドブームの開閉移動時の操作が簡単であるとともに、誤操作によるサイドブーム等の破損を防止することができるブームスプレーヤを提供する。
【解決手段】走行装置と、センタブームと、サイドブームと、センタブームを昇降移動させる昇降移動手段と、サイドブームを開閉移動させる開閉移動手段と、サイドブーム4の閉位置および開位置に対応する閉位置および開位置の操作位置の間を回動操作されることにより、開閉移動手段を操作する開閉操作レバーとを備えたブームスプレーヤにおいて、開閉操作レバーが閉位置から所定開度の位置の範囲にあるときに昇降移動手段によりセンタブームを下降移動させた場合に、センタブームが所定位置になると昇降移動手段によるセンタブームの下降移動を停止させる下降移動停止手段80を備えている。
(もっと読む)
農作業機
【課題】方向修正制御が容易に行えるトラクタに装着される農作業機を提供することを目的とする。
【解決手段】トラクタに装着する支持フレーム11、12と、支持フレーム11、12に対して回動可能に支持され農作業を行う作業部13と、作業部13を支持フレーム11、12に対して回動させるアクチュエータ22と、制御部26と、方向修正スイッチ27a、27bを有する操作部27と、作業部13に設置されるセンサ31とを備え、制御部26は、センサ31からの情報から作業部13の方向が基準の方向に一定になるようにアクチュエータ22を制御し、方向修正スイッチ27a、27bの操作された場合、アクチュエータ22を駆動させ、当該操作が終了したときの作業部13の方向を新たな基準の方向とする。
(もっと読む)
多目的小型電動式トラクター
【課題】畑作農作業のほとんどを機械化でき、密閉された空間でも作業が可能な多目的小型電動式トラクターと、ユニット化した小型農機具を提供する。
【解決手段】多目的小型電動式トラクター1は、荷物及び各農機具ユニットを載せる荷台8を有し、荷台8を載せる車体フレーム2にはロボットアーム10が設けられている。一対の駆動前輪3a、3bと一対の前輪駆動モータ4a、4bと一対のフリー回転の後輪9a、9bを有し、車体フレーム2に搭載されているウィンチワイヤー巻き取りドラム11と、ドラム駆動するモータ12を有している。荷台8は小型農機具ユニットを搭載して、荷台高さ調整モータ5で上下に移動可能になっている。ロボットアーム10は360度回転可能で3箇所に関節が設けられ、手首は360度回転可能で物体を挟むことが出来る。また手首部分は取り外し可能で、別種の農具を付け替えることが出来る。
(もっと読む)
作業車の油圧構造
【課題】部品点数の削減によるより一層の組み付け性やメンテナンス性の向上あるいはコストの削減などを図れるようにする。
【解決手段】ミッションケース2に形成した開口2Aを閉塞する蓋体53に複数の制御バルブ36,38,39,48〜50を装備し、蓋体53の内部に制御バルブ36,38,39,48〜50に対する油路28,30,32,34,41,51,52を形成した作業車の油圧構造において、蓋体53に、複数の制御バルブ36,38,39,48〜50のうちの少なくとも一つの制御バルブ36のバルブボディ36Aを一体形成してある。
(もっと読む)
トラクタの油圧装置
【課題】トラクタの外部油圧取出バルブと作業機昇降用制御バルブの合理的な油路の連通を図る。
【解決手段】油圧シリンダを内装した油圧ハウジング8の上面にベース部材16を取付け、該ベース部材16の両側に外部油圧取出バルブ18a、18bを配置して、ベース部材16からその両側の外部油圧取出バルブ18a,18bに圧油を供給する油路O2,O3と、該油路に油圧ハウジング8から圧油を供給するための入力ポートPと、外部油圧取出バルブ18a,18bから各種アクチュエータ17a、17bへ送油した圧油を排出するタンクポートTとをベース部材16内に設け、油圧シリンダを内装した油圧ハウジング8の側面に昇降用制御バルブ11を設け、外部油圧取出バルブ18a、18bの中立位置にて該バルブ18a、18bへそれぞれ供給した圧油を回収する出力ポートNと昇降用制御バルブ11とを連通する。
(もっと読む)
農用トラクタ
【課題】インプルメントが作業高さ範囲よりも上昇したことをインプルメント側で認識できるように構成して、貯留した薬剤や肥料が圃場端部の枕地で不要にこぼれ落ちることを防止する。
【解決手段】トラクタ本機1に備えた主制御装置16に、インプルメント制御用信号Eを出力する出力手段と、リンク機構4の昇降状態に基づいてリンク機構4に連結されたインプルメントが作業高さ範囲よりも上昇した場合にはインプルメント制御用信号Eを補正する出力補正手段とを備えてある。
(もっと読む)
ブーム式作業機
【課題】 平行リンケージ式リフト装置に対するブーム装置の上下取付固定位置を簡単且つ安全に変更できる、安価なブーム式作業機を提供する。
【解決手段】 平行リンケージ式リフト装置15によって昇降駆動されるガイド支柱25,25と、該ガイド支柱25,25に結合され、その結合状態を保持したままで該ガイド支柱25,25に沿って相対的に上下動自在であり、且つ、該ガイド支柱25,25に対して複数の上下位置で固定可能なブーム支持体26,26と、該ブーム支持体26,26に固着されたブーム装置6を備える。該ブーム装置6を支柱33で支持させ、前記ガイド支柱25,25と前記ブーム支持体26,26の固定状態を解除し、前記リフト装置15を作動させて前記ガイド支柱25,25を昇降させ、前記ガイド支柱25,25の新たな位置に前記ブーム支持体26,26を固定する。その後、前記支柱33を取り外す。
(もっと読む)
作業車両のアーム型作業機
【課題】農用作業車両の複数箇所にロボットアームを装着可能に構成し、ロボットアームにより複数の作業を円滑に実行する。
【解決手段】縦軸(22c)回り及び横軸(22d)回りに回動自在な第一アーム(23)と、この第一アーム(23)の先端部に屈折自在に連結している第二アーム(24)とでロボットアームを構成する。ベース部材(22)に前記第一アーム(23)を前記縦軸(22c)回りに回動自在に支持し、トラクタ(1)の機体前側部と左右側部にベース部材(22)の取付部(21a,21b)を設け、第二アーム(24)の先端部に複数の補助作業装置(26,…)を取り付け可能に構成する。
(もっと読む)
自動平行式作業機
【課題】 手動から自動操作にすることにより作業面と作業機の角度関係にオペレータが何も気を使う必要がなく、オペレータの疲労を軽減し、正確に処理作業を行うことができる自動平行式作業機を提供すること。
【解決手段】 揺動軸の回りに揺動する支持リンク20に支持軸22の一端部を固定すると共に、支持軸22の他端部に回転軸を介して作業部を固定する。作業部は、第4シリンダ26等からなるアクチュエータによって、上記回転軸の回りを揺動できるようになっている。作業部7のケース19の外面には、対象物までの距離を測定する第1および第2超音波センサ30,31が取り付けられている。上記第1および第2超音波センサ30,31からの信号を受けた自動制御装置が、作業部7が斜面等の対象物に対して略平行になるように、アクチュエータを制御するようになっている。
(もっと読む)
歩行式移動作業車両の傾斜制御装置
【課題】機体の左右バランスを大きく崩すことなく、軟弱な土壌や凹凸のある圃場面を走行可能な歩行式動力散布機を提供する。
【解決手段】歩行式動力散布機11の操向操作具である左右両側に把持部を有する操縦ハンドル23L,23Rを機体フレーム13に上下動(ローリング)可能に取り付け、且つ機体フレーム13に対して左右一対の走行装置12L,12Rを独立的若しくは背反的に上下動可能に支持すると共に、前記操縦ハンドル23L,23Rの上下動操作に連動して両走行装置12L,12Rの上下動させる連係手段81を設けた。
(もっと読む)
除草機
【課題】 機体全体の大型化及びコストアップを招くことなく、株元部分の除草位置及び除草範囲を簡単かつ容易に調節して常に適確良好な除草効果を発揮できるようにする。
【解決手段】 乗用走行機体4に昇降自在に連結された前後方向に長いフレーム22に接地ソリ23と、植付け条における株間に左右側方から作用するタイン24を前後複数に並設した株間除草手段10Aと、条間除草手段10Bとを取り付けてなる除草機であって、複数のタイン24を、左右方向に位置変更固定自在で、かつ、フレーム22に対する前後方向の傾斜角度変更固定自在に構成している。
(もっと読む)
多目的農業機械
【課題】走行駆動と作業機駆動出力とが可能な本機に、異なる作業機を付替え可能な構成において、作業機の交換に応じて切替えを要求される制御プログラムの誤選択の発生が起こり得る。
【解決手段】走行駆動と作業機駆動出力とが可能な本機2と、この本機2に装着可能で制御対象(昇降制御、左右水平制御、植深さ調整制御)の組合せの異なる作業機3・4・5・6の群と、を備える多目的農業機械1であって、本機2には、前記制御対象の組合せにそれぞれ対応する制御プログラム93・94・96の群が備えられると共に、作業機側コネクタ100と本機側コネクタ27との連結により形成される識別回路110と、この識別回路110による検出に応じて、その制御対象の組合せに対応する制御プログラムの動作を許可する選択用判定回路28と、が備えられる。
(もっと読む)
走行式動力散布機
【課題】圃場内を走行して水稲を損傷させることなく農薬、肥料等の粉粒状ないし液状の散布物を広範囲、且つ効率的に散布することが可能な走行式動力散布機を提供する。
【解決手段】左右一対のクローラ走行装置11L,11Rを支持する機体フレーム12
に搭載してなる動力散布機31の高さ調節を行う高さ調節手段Qを設けると共に、当該動力散布機31の散布管61を水平方向に所定角度θで揺動させる強制揺動手段Sを設けることによって、散布管61の先端から散布物を広範囲、且つ効率的に散布できるようにした。
(もっと読む)
マルチャ
【課題】マルチフィルム敷設装置の畝に対する姿勢を容易に調整できるマルチャを提供する。
【解決手段】ロータリ4の機枠12に、爪軸13回りに上下揺動自在で且つ任意の揺動位置で固定自在に第2の機枠38を取り付け、第2の機枠38に畝整形器5とマルチフィルム敷設装置6とを設け、ゲージ輪62の高さを調整する高さ調整装置71の第1の係合部78と、第2の機枠38の第2の係合部82とに亘って設けられるロックプレート79を備え、このロックプレート79は第1、第2の係合部78,82に係合する係合孔80A,80Bを有し、第2の機枠38に、不使用時にロックプレート79を左右軸廻りに回動自在に支持する支持部83と、該支持部83に支持された状態のロックプレート79の係合孔80Bに挿通する指示部材86とを設け、指示部材86と係合孔80Bとの位置関係により、マルチフィルム敷設装置6の姿勢が適正姿勢であるか否かが指示される。
(もっと読む)
1 - 20 / 21
[ Back to top ]