
Fターム[2B304MA20]の内容
Fターム[2B304MA20]に分類される特許
1 - 20 / 32
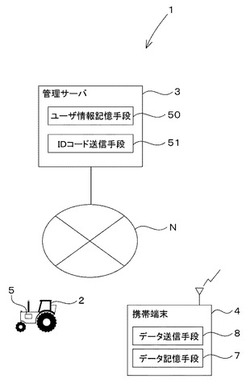
作業機の作動システム
【課題】第三者による作業機の作動を確実に防止することができる作業機の作動システムを提供する。
【解決手段】管理サーバ3は、ユーザ登録の完了後に携帯用IDコードを携帯端末4に送信するIDコード送信手段51を備え、携帯端末4は、IDコード送信手段51から送信された携帯用IDコードを保存するデータ記憶手段7と、データ記憶手段7に記憶された携帯用IDコードを作業機2に送信するデータ送信手段8とを備え、制御装置5は、携帯端末4から送信された携帯用IDコードと予め保存された作動用IDコードとの照合を行うIDコード照合手段と、照合手段によってIDコードの照合が成立したときに制御装置5による通常制御を許可すると共に照合が不成立のときに通常制御を許可しない制御制限手段とを備えている。
(もっと読む)
作業車両のエンジン負荷制御装置

【課題】作業時に過負荷がかかった場合において、作業形態に応じて減速割合を変更可能とし、負荷制御のモードを切換可能な作業車両のエンジン負荷制御装置を提供する。
【解決手段】作業車両のエンジン負荷制御装置において、エンジン負荷制御装置50は、エンジン回転数を設定エンジン回転数Xsに保つように、エンジン21が過負荷となった時の負荷に応じて、車速を増減し、又は作業機30を昇降する構成とし、負荷車速制御と負荷作業機昇降制御との制御優先順位を設定する制御実行順序設定手段52を備える。
(もっと読む)
農作業機
【課題】トラクタに装着して農作業を行う農作業機であって電装品が故障又は操作不能になった場合、必要な位置にアクチュエータを強制的に作動させることができる農作業機を提供することを目的とする。
【解決手段】トラクタ1に装着して、操作ユニット11からの操作信号を受信して、受信した操作信号に基づきバッテリ2を電源として、農作業機に配置される制御ボックス13内の制御部133の制御により農作業機の一部をアクチュエータ56、56’により作動させる農作業機において、制御ボックス13の表面に非常動作用スイッチ131を設け、非常動作用スイッチ131をONとすると、制御部133はアクチュエータ56、56’を作動させる
(もっと読む)
農作業機
【課題】トラクタに装着して農作業を行う農作業機であって電装品が故障又は操作不能になった場合、必要な位置にアクチュエータを強制的に作動させることができる農作業機を提供する。
【解決手段】操作部11からの操作信号を受信して、受信した操作信号に基づきバッテリ2を電源として、制御部13の制御により農作業機の一部をアクチュエータ56により作動させ、制御部13とアクチュエータ56とバッテリ2とはメインハーネス20を介して接続されており、両端にコネクタを有する作動用ハーネス25を備え、メインハーネス20は、途中で分岐して先端にコネクタを有する分岐ハーネス部21を有し、分岐ハーネス部21の先端のコネクタに作動用ハーネス25の一端のコネクタを接続し、作動用ハーネス25の他端のコネクタにアクチュエータ56を接続した場合に、バッテリ2からの電気がアクチュエータ56に直接送られてアクチュエータ56を作動させる。
(もっと読む)
薬液散布作業車両
【課題】旋回時又は旋回終了時に旋回外側のサイドブームを自動的に上昇又は下降させる制御を安全性を考慮して可能にした薬剤散布作業車両を提供すること。
【解決手段】GPS受信機81から得られる車速又は車輪12又は13の回転数から得られる車速により適切な薬液散布量となるように薬液タンク18からの薬液流量を流量制御モータ10により流量調節弁73の開度を調整する。このとき車輪12及び/又は13の操舵角の検知により自動的に旋回外側のサイドブーム44の上昇を行い、また前記車速が所定値以上になると旋回外側のサイドブーム44の自動上昇を行わない制御を行うことで、高速走行時にサイドブーム44の破損等の不具合を防止できる。
(もっと読む)
セミクローラ型作業車両
【課題】セミクローラ型作業車両において、左右クローラ走行装置を持ち上げ支持し、泥の落下を防止しながら路上走行をすることを課題とする。
【解決手段】作業車両の機体前側部には左右前輪を、機体後部には左右クローラ走行装置を設けたセミクローラ型作業車両において、機体後部に作業機昇降用のリフトアーム及び作業機連結用の三点リンク機構を設け、該三点リンク機構の左右ロワーリンクに、前後方向に長い左右持ち上げ棒を取り付け、左右ロワーリンクの前端部よりも前方へ突出する左右持ち上げ棒の前側部位に左右接地輪体を設け、左右リフトアームにより左右ロワーリンクを上方へ回動させると、左右持ち上げ棒の左右接地輪体により左右クローラ走行装置を地面から浮上させて支持することを特徴とするセミクローラ型作業車両とする。
(もっと読む)
薬剤散布車の散布制御装置
【課題】左右のブームをそれぞれ昇降可能に備えて薬剤散布する際の機体旋回後の散布再開に伴う作業者の負荷軽減を可能とする薬剤散布車の散布制御装置を提供する。
【解決手段】薬剤散布車の散布制御装置は、直線散布走行から旋回走行により隣接域に移行して逆方向の直線散布走行を開始する薬剤散布車に薬剤散布用の左右のブーム(9b,9b)を昇降可能に備え、これら左右のブーム(9b,9b)を低位散布のための作業位置と高位待避のための非作業位置にそれぞれ切替え可能に構成され、直線散布走行中に所定の旋回判定舵角以上となる1回目の舵角検出によってその旋回外側のブーム(9b)を非作業位置に切替え制御し、これに続く同側の旋回判定舵角以上となる2回目の舵角検出によって旋回終了と判定し、この旋回終了の判定によって上記ブーム(9b)を作業位置に切替える制御処理を設けたものである。
(もっと読む)
ブームスプレーヤ
【課題】センタブームの昇降移動やサイドブームの開閉移動時の操作が簡単であるとともに、誤操作によるサイドブーム等の破損を防止することができるブームスプレーヤを提供する。
【解決手段】走行装置と、センタブームと、サイドブームと、センタブームを昇降移動させる昇降移動手段と、サイドブームを開閉移動させる開閉移動手段と、サイドブーム4の閉位置および開位置に対応する閉位置および開位置の操作位置の間を回動操作されることにより、開閉移動手段を操作する開閉操作レバーとを備えたブームスプレーヤにおいて、開閉操作レバーが閉位置から所定開度の位置の範囲にあるときに昇降移動手段によりセンタブームを下降移動させた場合に、センタブームが所定位置になると昇降移動手段によるセンタブームの下降移動を停止させる下降移動停止手段80を備えている。
(もっと読む)
農作業機のリモコン装置
【課題】無線化されたリモコン装置の電源の消費電力を抑える。
【解決手段】リモコン装置100は、電源113と、これをオンオフする電源スイッチ101bと、このオンオフ状態を表示する電源ランプ101cと、農作業機の各種作動を制御する指令信号を送るための指令スイッチ101e等と、農作業機が所定作業可能状態にあるときに点灯する自動可ランプ101fと、各種作動を制御する指令信号データを記憶する記憶部111と、指令スイッチ101e等・電源スイッチ101bのいずれかがオンされると、指令信号データを記憶部から読み込んで通信部に送る制御部110を備え、制御部110は電源ランプ101cと自動可ランプ101fが点灯している時に、電源ランプ101cと自動可ランプ101fの電力消費を抑える省エネモード及び電源ランプ101cを消灯するオートパワーオフモードのいずれかに切り替えるランプモード切替部110bを備える。
(もっと読む)
移動農機
【課題】使用頻度の高いエンジンの高回転域で、安定した作業速度を確保して作業の高能率化を図ることができるようにした移動農機を提供しようとするものである。
【解決手段】エンジン2の出力回転数を変更するアクセルペダル87と、前記アクセルペダル87の操作位置を検出するアクセルセンサ92を備え、前記アクセルセンサ92の出力に基づき、アクセルセンサ92の出力に対応するエンジン2回転数が、エンジン2の出力回転数として得られるように、前記出力回転数を制御するように構成する移動農機において、前記出力回転数の上限を設定する上限設定手段30,99,100を備え、前記アクセルセンサ92の出力に対応するエンジン2回転数が、前記上限設定手段30,99,100により設定した上限回転数よりも高い場合には、前記上限回転数が前記出力回転数として得られように、前記出力回転数を制御するように構成したものである。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のためのリモコンの操作ボックスを部品の交換なしに異なる作業機に対応できる農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機と、タッチスクリーンであるタッチパネル部41に表示された操作表示画面上の操作スイッチ表示に触れて操作する操作ボックス10とを備え、作業機は、当該作業機に設けられた出力機器30と、操作スイッチ表示の操作による操作信号を受信しこれに基づき出力機器30を制御する制御部21とを有し、操作表示画面は、作業機の機種毎に変更して、異なる作業機の操作を可能とする。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のためのリモコンの操作ボックスを部品の交換なしに異なる作業機に対応できる農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機と、操作パネル100、101、102上の操作スイッチを操作する操作ボックス10とを備え、作業機は、当該作業機に設けられた出力機器30と、操作スイッチの操作による操作信号を受信しこれに基づき出力機器30を制御する制御部21とを有し、操作ボックス10は、作業機の異なる機種に対応した複数の操作パネル100、101、102を有し、複数の操作パネル100、101、102は、操作ボックス10を構成する筐体の異なる面に設置されている。
(もっと読む)
農作業機用リモコン操作システム
【課題】部品の共通化が可能でかつシステムの変更を容易に行うことができるトラクタに装着する農作業機に備える出力機器を無線で操作するための農作業機用リモコン操作システムを提供することを目的とする。
【解決手段】トラクタに装着する農作業機に備える出力機器を無線で操作するための農作業機用リモコン操作システムであって、操作信号を無線送信可能な送信部10と、農作業機側に設置され送信部10からの無線信号を受信する受信部20と、農作業機側に設置され受信部20からの操作信号により出力機器を制御する制御部40と、受信部20と出力機器と制御部40とに接続される制御ハーネス30とを有し、受信部20と制御ハーネス30の間には、受信部20を脱着可能な接続部20aを具備する。
(もっと読む)
トラクタ
【課題】要求精度を満たしつつ、電動モータのロック回数を減らす。
【解決手段】昇降スイッチレバー23の操作に応じて電動モータ25を駆動制御することにより、作業機を所定の上昇位置及び下降位置まで昇降作動させる昇降スイッチ制御手段を設けたトラクタにおいて、昇降スイッチ制御手段は、電動モータ25から出力されるパルスに基づいてモータ作動体24の位置を特定すると共に、昇降スイッチレバー23の上昇操作に応じてモータ作動体24を上昇側に作動させる際には、モータ作動体24を上昇側の機械的なロック位置まで作動させ、昇降スイッチレバー23の下降操作に応じてモータ作動体24を下降側に作動させる際には、電動モータ25の出力パルスに基づいて特定される下降側の所定位置までモータ作動体24を作動させる。
(もっと読む)
農作業機用リモコン送信装置
【課題】トラクタに装着する農作業機に備える出力機器を操作するための農作業機用リモコン送信装置で、電源確保の確実性を向上させた農作業機用リモコン送信装置を提供することを目的とする。
【解決手段】トラクタ1に装着される農作業機2に備える出力機器110を操作するために操作信号を無線により送信する農作業機用リモコン送信装置10において、操作信号を無線により送信する無線送信部11と、外部電源が接続可能な外部電源接続部10aと、外部電源接続部10aから入力される電圧を無線送信部11で使用する一定の電圧に変換する電源回路12とを有する。
(もっと読む)
農作業機用リモコン装置
【課題】電源を入れたと同時に、操作者が意図しない農作業機の動作が実行される可能性をなくすことができる農作業機用リモコン装置を提供する。
【解決手段】農作業機用リモコン装置60は、電源スイッチ210がオン状態のとき、指令信号を搬送するための電波を送信し、各指令スイッチがオンされたとき指令信号データに基づいて指令信号を電波に載せて送信する通信手段223と、各指令スイッチがオンされたとき指令信号データを記憶手段222から読み込み、指令信号データを通信手段223に送る制御手段221を備え、通信手段223は、電源スイッチ210が入れられた立ち上げ時には、各指令スイッチを操作するときに出力する電波の強度よりも小さい強度で出力する制御を行う出力制御手段226を備える。
(もっと読む)
農作業機用無線受信制御装置及び農作業機用リモコン装置
【課題】無線受信制御装置の電源スイッチを入れたときにいきなり農作業機の動作が実行される可能性をなくし、安全性を高めることができる農作業機用無線受信制御装置及び農作業機用リモコン装置を提供する。
【解決手段】農作業機用無線受信制御装置70は、走行機体の後部に装着される農作業機に設けられ、農作業機の動作を指令する操作指令を無線信号によって指令するリモコン装置60からの信号を受信し、リモコン装置に返信の信号を送る通信手段と、通信手段によって受信された信号に従って農作業機の作動を制御する制御手段を備え、電源スイッチをオンしたときに、リモコン装置からの信号が受信圏内に存在するときには、自動的に制御手段への電力の供給を遮断する電源停止制御手段200aを備える。
(もっと読む)
無線受信制御装置
【課題】走行機体に搭乗した作業者が操作する無線指令装置からの指令信号を確実に受信し、装置内部への水の浸入を防止可能な無線受信制御装置を提供する。
【解決手段】走行機体の後部に装着される耕耘作業機1に設けられ、耕耘作業機1に搭乗した作業者が操作する無線指令装置から送信される無線方式の指令信号を受信しこの信号に応じて耕耘作業機1の作動を制御する無線受信制御装置70であり、耕耘作業機1に設けられた取付板71と、内部に形成された収容凹部の開口部が取付板71に面して塞がれた状態で取付板71に設けられた制御ボックス82と、収容凹部内に収容され、無線指令装置からの指令信号を受信するアンテナが基板上に形成された電子基板100を備え、制御ボックス82は、耕耘作業機1の作業姿勢時において、電子基板100が耕耘作業機1に搭乗した作業者側を向いて取付板71に設けられる。
(もっと読む)
対地作業具の支持装置
【課題】対地作業具の装着時には適正な速度及び付勢力でホルダの回動をアシストしながら、対地作業具を外した状態では、第1付勢具の付勢による回動速度を第2付勢具が抑え、ホルダの上方への回動速度を遅くすることができる。
【解決手段】
作業機K後部の支持フレーム2に上下回動可能に対地作業具4を装着するホルダ5を支持し、このホルダ5を上方側に回動させる方向に付勢して対地作業具4の持ち上げ力を軽減する回動アシスト機構6に、ホルダ5を回動させる付勢方向が同一である第1付勢具7と第2付勢具8とを設け、この第2付勢具8の付勢によるホルダ5を回動させる速度が第1付勢具7より遅くしている。
(もっと読む)
対地作業具の支持装置
【課題】付勢具を支持フレームに略沿わせて配置して、コンパクトにすることができると共に、付勢具の付勢力を効率よく対地作業具に伝えることができる。
【解決手段】作業機K後部の支持フレーム2に上下回動可能に対地作業具4を支持し、対地作業具4を上方側に付勢して持ち上げ力を軽減する回動アシスト機構6は、対地作業具4と一体回動するアーム9と、アーム9に枢支された連動リンク11と、連動リンク11に作用軸12で枢支され且つ支軸13で支持フレーム2に枢支された揺動部材14と、揺動部材14に力軸15で枢支された付勢具7とを有し、付勢具7の伸張で作用軸12が後下がりに移動して対地作業具4を作業位置Aから非作業位置Bへ回動させる。対地作業具4の作業位置A時に力軸15を作用軸12の後下方で且つ支軸13の前下方に位置させ付勢具7を支持フレーム2に略沿わせて配置している。
(もっと読む)
1 - 20 / 32
[ Back to top ]