
Fターム[2B304QA11]の内容
Fターム[2B304QA11]の下位に属するFターム
ロータリ耕耘装置 (50)
Fターム[2B304QA11]に分類される特許
1 - 20 / 56
乗用移植機
【課題】植付作業機を傾斜した地面に下ろす際に、植付作業機や強制傾斜機構の破損を防止する。
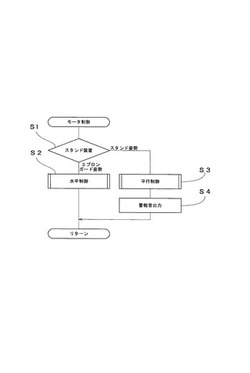
【解決手段】走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備える。
(もっと読む)
トラクタ

【課題】作業の経過時間でDPF内のPMの堆積量を推定することで、PMの堆積量が閾値を超えるまでの作業可能時間を推定し、作業効率を向上させることを課題とする。
【解決手段】排気ガス中の粒状化物質PMを捕集するディーゼルパティキュレートフィルタ46bを備えたディーゼルエンジンを搭載したトラクタにおいて、作業時に作業の種類を選択する作業切換手段71を設け、該作業切換手段71の選択に応じて時間の経過とともに前記ディーゼルパティキュレートフィルタ46b内の粒状化物質PMの堆積量を推定する堆積量推定手段110を設けたことを特徴とするトラクタの構成とする。
(もっと読む)
作業機のアンロード装置
【課題】油圧アクチュエータの停止時に油圧ポンプからの圧油を切換弁によってアンロード油路に流出させる作業機のアンロード装置を安価に得る。
【解決手段】切換弁102の背圧室から排油路104に圧油排出させる開き状態と圧油排出を停止する閉じ状態とに切り換え自在な開閉弁105、開閉弁105をパイロット油圧によって切り換え操作する制御弁107を備えてある。アクチュエータ駆動回路30,40が油圧アクチュエータ18,21を駆動するべく操作されると、制御弁107が開閉弁105を閉じ状態に切り換え操作し、アクチュエータ駆動回路30,40が油圧アクチュエータ18,21を停止するべく操作されると、制御弁107が開閉弁105を開き状態に切り換え操作する。
(もっと読む)
作業車両における作業機の昇降制御装置
【課題】作業機を下降させた状態での機体後進を確実に回避し、作業機の損傷を未然に防止する。
【解決手段】機体後部に昇降可能に連結される作業機3を昇降制御する制御部19であって、該制御部19は、ポジションコントロールレバー17の操作位置に応じて作業機3を昇降制御するポジション制御手段と、走行機体1の後進又は後進操作に応じて作業機3を所定の上昇位置まで上昇制御するバックアップ制御手段と、クイックアップレバー9の上昇操作に応じて作業機3を所定の上昇位置まで上昇制御し、クイックアップレバー9の下降操作に応じて作業機3を所定の下降位置まで下降制御するクイックアップ制御手段とを備え、バックアップ制御手段によって作業機3が上昇している際には、走行機体1の後進又は後進操作が解除されない限り、クイックアップレバー9による作業機3の下降制御を無効とする。
(もっと読む)
田植機
【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
【解決手段】田植機は、植付部と、土壌反力検出装置と、制御部と、を備える。植付部は、植付爪を駆動することにより苗の植付けを行う。土壌反力検出装置は、植付爪が苗の植え付けを行うごとに土壌から受ける土壌反力を検出する土壌反力検出部と、植付爪の回転位相を検出する回転位相検出部を備えている。前記制御部は、前記土壌反力及び回転位相に基づいて植深値を算出する(S102)。そして制御部は、検出された植深値に基づいて、植付部を昇降制御する(S109)。
(もっと読む)
トラクタ
【課題】車輪がスリップした場合に適正にプラウを上昇させて耕起作業を継続するトラクタを構成する。
【解決手段】牽引負荷センサSで検出した牽引負荷値で制御情報を参照して得られる目標対機体レベル値までプラウを上昇させるドラフト制御手段34が備えられている。制御情報はプラウの目標耕深に設定した際の目標耕深と牽引負荷値とに基づいて設定されるものであり、スリップ率取得手段37で検出するスリップ率が閾値を超えた場合には、既に設定されている制御情報に代えて、同じ値の牽引負荷値に対する目標対機体レベル値が高い値となる制御情報を新たに設定することでプラウを上昇させる。
(もっと読む)
作業車両
【課題】作業者が設定した所望の溝を圃場に精度よく形成することが可能な作業車両を提供する。
【解決手段】
トラクタは、圃場に自動制御によって溝を形成するに際し、まず、溝掘り作業機と圃場面との接地位置を検出する(S3)。そして、この接地位置を基準点として、溝掘り作業機を下降させることによって、溝の始端部において、設定された初期深さまで正確に溝を形成し、この始端部から所定の勾配で圃場に溝を形成する(S4)。
(もっと読む)
苗移植機
【課題】
苗載せ台を畦際側とは反対側へ移動させるときは、苗植機の走行を直ちに停止して、植付装置の植付操作を停止して、苗タンクを目的の方向へ大きく移動させて、苗移植機の旋回操作等を行わせる。又、この一旦横端へ移動させていた苗タンクを移動前の苗植付停止位置に戻してから、苗移植機の植付動作を行わせる必要があり、煩雑で正確な操作を要し、相当の時間と熟練を要する。
【解決手段】
植付装置3の伝動を停止した状態で苗タンク2を横端へ移動させるときの、摺動軸1の横送回転数をタンク送りセンサ6で検出し、この苗タンク2が横端に移動した後に前記苗植作用を開始するときは、前記タンク送りセンサ6が検出した横送回転数に基づいて摺動軸1を伝動回転して、前回苗植停止位置に苗タンク2を移動復帰する構成とする。
(もっと読む)
トラクタの作業機上限規制装置
【課題】作業機をトラクタの後部にリンク機構を介して昇降自在に装着したものにおいて、作業機の上昇上限位置をトラクタ近接位置に容易に設定することができるトラクタの作業機上限規制装置を提供する。
【解決手段】作業機8をトラクタ1の後部に昇降自在に装着するリンク機構9を備え、このリンク機構9を駆動して作業機8を上昇させる昇降シリンダ22を備え、作業機8が上昇してトラクタ1に近接した位置であるトラクタ近接位置に達したことを検出する上限検出センサ47を設け、この上限検出センサ47の検出信号によって昇降シリンダ22の作業機上昇動作を停止させるように構成する。
(もっと読む)
乗用草刈機
【課題】地上高を一定に保持可能なモアデッキを備える乗用草刈機を提供する。
【解決手段】電動ローンモア10が、モアブレードと、モアブレードを上方および側方から覆うモアデッキ15と、モアデッキ15を懸架するとともに、進行方向に延設されるメインフレーム18と、メインフレーム18の前部に取り付けられ、走行面の起伏を検出する前輪11と、メインフレーム18の後端と連結したシャーシ27と、前輪の検出した走行面の起伏に応じて、メインフレーム18をシャーシ27に対して上下回動可能とする回動筒73とを備える。
(もっと読む)
作業車両
【課題】オペレータが作業中に昇降制御や姿勢制御が確実に行われていることを確認できるようにすると共に、昇降制御や姿勢制御における感度調節のための参考情報を容易に得られるようにする。
【解決手段】昇降制御、或いは姿勢制御を行うアクチュエータ24,32に対して伸張指令が出されているか、縮小指令が出されているか、又は制御不能な状態にあるか否か等を、座席に座ったオペレータが目視可能なセンターピラー9bに設ける表示ユニット57を介してオペレータに表示する。
(もっと読む)
トラクタ
【課題】要求精度を満たしつつ、電動モータのロック回数を減らす。
【解決手段】昇降スイッチレバー23の操作に応じて電動モータ25を駆動制御することにより、作業機を所定の上昇位置及び下降位置まで昇降作動させる昇降スイッチ制御手段を設けたトラクタにおいて、昇降スイッチ制御手段は、電動モータ25から出力されるパルスに基づいてモータ作動体24の位置を特定すると共に、昇降スイッチレバー23の上昇操作に応じてモータ作動体24を上昇側に作動させる際には、モータ作動体24を上昇側の機械的なロック位置まで作動させ、昇降スイッチレバー23の下降操作に応じてモータ作動体24を下降側に作動させる際には、電動モータ25の出力パルスに基づいて特定される下降側の所定位置までモータ作動体24を作動させる。
(もっと読む)
オフセット作業機の作業方法
【課題】走行機体にオフセット作業が行えるように装着された作業機が、走行機体の移動と作業機自身の水平面内での回動及び移動により、圃場の作業部分から隅部分までの仕上げ作業が連続して行えるようにする。
【解決手段】走行機体2の前進走行に伴って前進する作業機1を一方の側にオフセットさせたときに、前記作業機1がその作業機1に介装された2種類の電動シリンダまたは油圧シリンダの伸縮により水平面内での前記走行機体2に対する2以上の水平回動の自由度を有するオフセット作業機を用い、前記走行機体2が前進走行しながら旋回したときに、前記作業機1に取り付けられた位置方位センサ20からの検出情報に基づいて前記2種類の電動シリンダまたは油圧シリンダの伸縮作動を自動制御することにより前記作業機1を水平面内で2以上に水平回動させながら、前記走行機体2に対する姿勢を連続的に順次変化させて前記作業機1自体の直進性を維持する制御を行う。
(もっと読む)
苗移植機
【課題】畦越えなどしようとして、苗植付装置を上昇させるときにエンストを起こさないようにすることができる苗移植機を提供すること。
【解決手段】車体の後側に昇降リンク装置2を介して昇降可能に装着された苗植付装置3を接地する作業位置まで下降させる操作と対地浮上する所定の非作業位置まで上昇させる操作が行える昇降操作装置110bと苗植付装置を任意の高さに上昇させることができる任意上昇操作装置110cを設け、任意上昇操作装置110cを操作すると、その上昇操作量に応じてエンストさせないようにエンジン12のアイドリング回転数を上昇させ、昇降操作装置110bを操作するとエンジンのアイドリング回転数を上昇させる作動状態であると、それを解除してアイドリング回転から元の通常回転に戻るようにしたので、畦越えしながらの植付時、エンジン12のアイドリング回転数が上昇するので、走行負荷に対処でき、エンストを防止できる。
(もっと読む)
畦成形機
【課題】水田等の圃場の作業残隅部の畦成形作業を走行機を後進させて行うような熟練を要する作業機ではなく、制御装置や制御プログラムが簡易で操作が簡単であるとともに、全体の製造コストを低くできる畦成形機の提供。
【解決手段】走行機が畦から離れる方向に旋回走行しながら直線状の連続した畦を成形する非平行走行畦成形作業が行える制御部を有し、非平行走行畦成形作業時は、畦成形作業部4に畦成形作業部4の進行方向の変位量を検知する検知手段6が設けられていて、変位量に基づき第2水平回動手段を作動させて畦成形作業部4の進行方向を一定方向とする制御を行うとともに、第1水平回動手段はフリー状態と固定状態を交互に予め設定した実行時間で繰り返し行う制御のみにより制御されて畦成形作業を行う畦成形機による。
(もっと読む)
農作業機
【課題】本発明は、上記課題に鑑みて、トラクタに装着され、トラクタの基本情報及びトラクタの状態情報に基いて適切に制御可能な動作部を有する農作業機を提供することを目的とする。
【解決手段】制御部3は、あらかじめ記憶部に記憶されたトラクタに関する情報であるトラクタ基本情報101に基づき計算される基本動作パターンをトラクタから取得したトラクタ状態情報102により修正して実動作パターンを計算し、実動作パターンに基づいて、検出部8からの情報により動作部で目的の動作をさせるためにアクチュエータ7の稼動を制御することで上記課題を解決する。
(もっと読む)
農作業機
【課題】トラクタに装着し農作業をする農作業機が作業しているか否かをより的確に判定
する判定システムを有する農作業機を提供することを目的とする。
【解決手段】農作業機が移動しているか否かを検知する移動検知手段1と、農作業機の姿勢が作業姿勢であるか否かを検知する作業姿勢検知手段2と、農作業機が作業している否かを判定する判定手段4とを有し、判定手段4は、移動検知手段1からの情報から農作業機が移動中であり、かつ、作業姿勢検知手段2からの情報から農作業機の作業姿勢が作業状態であると判断した場合、当該農作業機が作業中であると判定する。
(もっと読む)
苗移植機
【課題】本発明では、圃場を滑走するフローとの前側に整地ロータを配設した苗移植機で、苗植付部の左右ローリングと対地高さの制御感度の調整時の制御方法に工夫を凝らすことで苗植付部の苗植え付け深さが均等になるようにすることが課題である。
【解決手段】走行車体の後部に整地ロータとフロートを備えた苗植付部を設け、水平センサが検出する苗植付部の左右の傾きとフロート迎い角センサの検出する圃場面の前後傾きでローリングモータと昇降用油圧電磁バルブを制御して苗植付部のローリングと昇降を制御する苗移植機において、各センサの検出信号に対する制御動作の感度を調整する感度調節手段を設け、該感度調節手段を鈍感に調整した場合に整地ロータの高さ調整量を標準よりも低く制御した。
(もっと読む)
作業車両の昇降装置
【課題】昇降可能な作業機の下降をロックすることが可能な作業車両の昇降装置において、作業機の下降ロック作業を行ない忘れることによる作業機の意図しない下降作動が防止される作業車両の昇降装置を提供することを課題とする。
【解決手段】本発明は、作業機を昇降させるリフトシリンダ12と、該リフトシリンダ12を伸縮作動させる油圧制御回路14とを備え、前記油圧制御回路14の下降側回路に電磁切換バルブ21を介装し、該電磁切換バルブ21が通電されることにより作業機の下降が許容される一方で電磁切換バルブ21が消磁されることにより下降側回路が閉ざされて作業機の下降が阻止される。
(もっと読む)
移植機
【課題】感知体の土圧感知に基づいて植付作業機の対地高さを制御するものにおいて、構成がシンプルで且つハンチングの発生を効率的に抑制できる移植機を提供することを課題とする。
【解決手段】走行機体3と、走行機体3に昇降自在に連結された植付作業機7と、植付作業機7を昇降駆動させる油圧式の昇降シリンダー9と、前記昇降シリンダー9を伸縮作動させる昇降バルブ18と、植付作業機7に設けられ圃場面からの土圧を感知する感知体12と、感知体12の土圧感知に昇降バルブ18の開閉を連動させる連係手段32とを備えた移植機において、非接地高さにある植付作業機7を下降作動させ、植付作業機7が圃場に接地すると、それ以降、感知体12の土圧感知に基づく対地高さ制御中に昇降バルブ18の植付作業機7下降側の開度が全開にならないように規制する規制手段33を設け、植付作業機7の下降スピードを制限する。
(もっと読む)
1 - 20 / 56
[ Back to top ]