
Fターム[2B304QB12]の内容
Fターム[2B304QB12]の下位に属するFターム
Fターム[2B304QB12]に分類される特許
1 - 20 / 50
作業車両における作業機の昇降制御装置
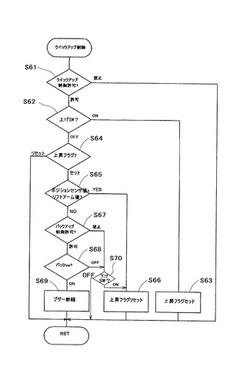
【課題】作業機を下降させた状態での機体後進を確実に回避し、作業機の損傷を未然に防止する。
【解決手段】機体後部に昇降可能に連結される作業機3を昇降制御する制御部19であって、該制御部19は、ポジションコントロールレバー17の操作位置に応じて作業機3を昇降制御するポジション制御手段と、走行機体1の後進又は後進操作に応じて作業機3を所定の上昇位置まで上昇制御するバックアップ制御手段と、クイックアップレバー9の上昇操作に応じて作業機3を所定の上昇位置まで上昇制御し、クイックアップレバー9の下降操作に応じて作業機3を所定の下降位置まで下降制御するクイックアップ制御手段とを備え、バックアップ制御手段によって作業機3が上昇している際には、走行機体1の後進又は後進操作が解除されない限り、クイックアップレバー9による作業機3の下降制御を無効とする。
(もっと読む)
作業車両

【課題】本発明は、路上走行と耕耘作業のモード切替手段を設けることによって路上走行速のままで耕耘作業に入るような事態を回避し、問題解決を図らんとするものである。
【解決手段】メータパネル(8)の適所にスイッチON・OFFにより耕耘作業モードと路上走行モードとに切り替えできるモード切替スイッチ(22)を設け、前記耕耘作業モードの詳細設定をする各種設定器(29)は、前記メータパネル(8)部周辺若しくは運転操作部(9)近くに設置してあることを特徴とする作業車両とする。また、前記各種設定器(29)は、耕深設定器(24)、傾斜設定器(26)、ブレーキ調整設定器(28)等からなり、タッチパネル画面で調整が行えるように構成してあることを特徴とする作業車両とする。
(もっと読む)
作業車の供給物補給構造
【課題】作業装置の供給物補給高さ位置への無理な下降操作で作業装置が損傷するなどの不都合の発生を阻止する。
【解決手段】走行車体の後部に供給物を圃場に供給する作業装置を昇降可能に装備し、作業装置への供給物の補給を要する状態を検知した場合に、作業装置を作業高さ位置から予め設定した供給物補給高さ位置まで自動昇降させる補給用昇降制御を実行する制御手段を備えた作業車の供給物補給構造において、作業装置の接地を検知し、かつ、作業装置の高さ位置が供給物補給高さ位置よりも高いことを検知した状態で、作業装置への供給物の補給を要する状態を検知した場合には、制御手段が補給用昇降制御を実行しないように構成してある。
(もっと読む)
作業車両
【課題】昇降可能に装架した苗植付部や播種機等の作業装置の上昇操作を忘れた場合においても、機体後進による作溝機の詰まりや破損等の事態を招くことなく、圃場作業を円滑に進めることができる作業車両を提供する。
【解決手段】苗移植機は、作業装置4を昇降自在に支持するリンク機構およびその昇降位置検知部材と、作業装置4に設けた作溝器に粒状体を供給する粒状体供給装置5と、前後進の車速選択とリンク機構の支持高さ調節とを行う走行操作レバー73およびその走行操作検知部材73Sと、後輪回転検知部材と、報知部材71と、作業装置4に配置された報知停止スイッチ72とを走行車体に備えて構成され、リンク機構が所定高さ以下、走行操作レバー73が後進車速位置、後輪11が回転の3条件全てに該当した時に、報知停止スイッチ72の操作まで報知部材71を作動する制御を構成したものである。
(もっと読む)
移植機
【課題】機体の前上がり傾斜が所定の傾斜角以上になる畦越え作業や、機体の後部に昇降自在に連結した植付作業機が圃場から脱出するぎりぎりの状態(植終い)までの植付作業を、オペレータが乗用型田植機に搭乗した状態で行えるようにする。
【解決手段】機体の前後方向の傾斜を検出するピッチングセンサ69が所定の傾斜角以上の機体の前上がり傾斜を検出している時、自動昇降制御中にはフロート23の基準姿勢を基準値かた前下がり状態に姿勢変更して自動昇降制御を継続し、自動昇降制御中でなければ植付を停止した状態でフロート23を接地させた植付作業機5の自動昇降制御を実行する制御手段61を設ける。
(もっと読む)
均平作業機
【課題】均平作業機が、均平作業に伴い、圃場表面の余剰の土を均平作業機の左右側方に掻き分けるようにして押し逃がして左右側縁に沿って不必要な畝が生じるような従来の問題を解決する。
【解決手段】均平部3は、作業進行方向に対して横方向に水平に伸びる均平支持軸20に、その長手方向に一定間隔を置いて取り付けられた複数の均平部材21とを有し、全体的に櫛歯状に構成されており、圃場外部に設けられたレーザ発光装置48から放射される水平レーザ信号49を受光装置41で受光して、受光装置41で検出した均平部3の高さに応じて、油圧シリンダ30を動作して上下可動用リンク機構4により、均平部3を圃場表面に対して一定の角度の姿勢を維持して上下に移動させて高さを制御する。
(もっと読む)
作業車の車体状態切り換え構造
【課題】車体の状態を第1状態から第2状態に切り換える際の判断基準に創意工夫を凝らすことにより、作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】操舵輪の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備えた作業車の車体状態切り換え構造において、車体の走行速度を検出する車速センサ56を備え、車体状態切換手段48が、切角センサ55の検出、および、車速センサ56の検出に基づいて、車体の旋回角度を算出し、かつ、算出した旋回角度が設定角度を超えると、車体の状態を車体に連結した作業装置を機能させる作業用の第1状態から作業装置を機能させない移動用の第2状態に切り換えるように構成した。
(もっと読む)
トラクタの作業機上限規制装置
【課題】作業機をトラクタの後部にリンク機構を介して昇降自在に装着したものにおいて、作業機の上昇上限位置をトラクタ近接位置に容易に設定することができるトラクタの作業機上限規制装置を提供する。
【解決手段】作業機8をトラクタ1の後部に昇降自在に装着するリンク機構9を備え、このリンク機構9を駆動して作業機8を上昇させる昇降シリンダ22を備え、作業機8が上昇してトラクタ1に近接した位置であるトラクタ近接位置に達したことを検出する上限検出センサ47を設け、この上限検出センサ47の検出信号によって昇降シリンダ22の作業機上昇動作を停止させるように構成する。
(もっと読む)
乗用草刈機
【課題】地上高を一定に保持可能なモアデッキを備える乗用草刈機を提供する。
【解決手段】電動ローンモア10が、モアブレードと、モアブレードを上方および側方から覆うモアデッキ15と、モアデッキ15を懸架するとともに、進行方向に延設されるメインフレーム18と、メインフレーム18の前部に取り付けられ、走行面の起伏を検出する前輪11と、メインフレーム18の後端と連結したシャーシ27と、前輪の検出した走行面の起伏に応じて、メインフレーム18をシャーシ27に対して上下回動可能とする回動筒73とを備える。
(もっと読む)
ブームスプレーヤ
【課題】センタブームの昇降移動やサイドブームの開閉移動時の操作が簡単であるとともに、誤操作によるサイドブーム等の破損を防止することができるブームスプレーヤを提供する。
【解決手段】走行装置と、センタブームと、サイドブームと、センタブームを昇降移動させる昇降移動手段と、サイドブームを開閉移動させる開閉移動手段と、サイドブーム4の閉位置および開位置に対応する閉位置および開位置の操作位置の間を回動操作されることにより、開閉移動手段を操作する開閉操作レバーとを備えたブームスプレーヤにおいて、開閉操作レバーが閉位置から所定開度の位置の範囲にあるときに昇降移動手段によりセンタブームを下降移動させた場合に、センタブームが所定位置になると昇降移動手段によるセンタブームの下降移動を停止させる下降移動停止手段80を備えている。
(もっと読む)
牽引作業車両の対地作業機昇降制御装置
【課題】本発明の目的は、昇降調節とともに傾動動作するいわゆる2Pリンク式のヒッチに装着された対地作業機について、その耕耘作業部の昇降誤差を抑えて所要の耕深を確保することができる牽引作業車両の対地作業機昇降制御装置を提供する。
【解決手段】牽引作業車両の対地作業機昇降制御装置は、傾動制御可能なリフトアーム2によって後部ヒッチ3を一体に支持し、この後部ヒッチ3に検出橇13を圃場面に追従可能に軸支し、その傾動角度と対応する圃場面からの高さに基づいて、上記後部ヒッチ3からその後方に延出して一体装着した作業機フレーム4aを昇降作動制御することにより、同作業機フレーム4aに支持される耕耘作業部6を耕深設定具24によって設定した目標の耕深Dに調節するように構成され、上記検出橇13の圃場面に対する角度dと対応する耕耘作業部6の高さを作業機フレーム4aの昇降角度値Δによって補正するものである。
(もっと読む)
作業機
【課題】後進時に作業部の上昇操作によって機体を上昇させる作業機において、機体の動作状況をオペレータに直感的に把握させることができる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの後進操作が検出されている場合において、刈取部が最上端位置にある状態で、刈取部昇降スイッチの上昇側操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。そして、制御部は、この機体上昇制御とともに、ブザーによって機体の上昇を報知する。この状態で、主変速レバーが前進操作に切り替えられたことが検出されると、制御部は、機体の高さを所定位置まで下降させる機体下降制御を行うとともに、ブザーによって機体の下降を報知する。
(もっと読む)
水田作業機
【課題】植播系作業装置の昇降に関連して作動するように構成された昇降関連作業装置の作動を、不要な誤操作などを生じる虞少なく行えるようにする。
【解決手段】植播系作業装置の昇降作動方向、及び植播系作業装置が所定高さ位置H2の上側または下側の何れの側に位置するかの判別結果に基づいて、昇降関連作業装置の作動状態を、昇降作動行程中における所定高さ位置H2の上側と下側とで互いに作動状態が異なり、かつ所定高さ位置H2の下側における作動状態が、昇降作動行程の上昇行程でも下降行程でも同じ作動状態に維持されるように構成し、所定高さ位置H2を変更可能にした。
(もっと読む)
トラクタ
【課題】エンジン始動時の傾斜自動制御を禁止すると共に、複雑な禁止解除操作を行うことなく傾斜自動制御を有効にし、速やかな作業再開を可能にする。
【解決手段】制御装置32に、昇降スイッチレバー23の操作に応じて電動モータ25を駆動制御することにより、作業機を所定の上昇位置及び下降位置まで昇降作動させる昇降スイッチ制御手段と、走行機体1又は作業機の左右傾斜に応じて傾斜制御バルブ14を切り換え制御することにより、作業機を自動的に傾斜作動させる傾斜自動制御手段とを設けたトラクタにおいて、昇降スイッチ制御手段は、電動モータ25から出力されるパルスに基づいてモータ作動体の位置を特定可能であって、エンジン始動時に傾斜自動制御を禁止する傾斜自動禁止手段と、所定の作業機昇降操作に応じて傾斜自動制御の禁止を解除する傾斜自動禁止解除手段とを備える。
(もっと読む)
作業機の油圧装置
【課題】ローリング制御弁の中立位置で、流量分配弁よりも上流側の圧油の全量を昇降制御弁側へ送り込み可能にし、圧油の有効利用と、昇降用シリンダの作動ショックを少なくする。
【解決手段】ローリング用シリンダ11が操作限界位置に達してリリーフ弁36が圧油を油タンクT側へ排出すると、ローリング制御弁39を中立位置39cに戻し、流量分配弁38を分配供給位置38bに切換え、リリーフ弁36の排出作動中に昇降制御弁42が操作されると、その昇降制御弁42による昇降用シリンダ9側への圧油供給量の増加率を、リリーフ弁36の排出作動中以外の時点で操作されるときの圧油供給量の増加率よりも緩やかにする制御手段14Aを備えた。
(もっと読む)
田植機
【課題】走行部が傾斜しても整地装置を適切な位置で整地作業をすることができる田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を昇降自在に取り付けた田植機において、走行部の前後方向の傾斜角度を検出する傾斜角度検出手段と、植付部の植付深さ位置を検出する植付深さ位置検出手段と、両検出手段の検出結果に基づいて整地装置の整地高さを算出補正する制御部と、同制御部により制御されて整地装置を昇降させる昇降用アクチュエータとを具備するようにしている。
(もっと読む)
移植機
【課題】植付作業機の上昇操作を行う上昇操作具を変速レバーの把持部に設けて操作性を向上させた移植機において、オペレータの意図しない植付作業機の上昇を防止することを課題とする。
【解決手段】本発明は、走行機体3の後部に昇降可能に連結された植付作業機7と、植付作業機7の昇降制御を行う制御部23と、走行変速操作を行う変速レバー18の把持部18aに設けられて植付作業機7の上昇操作を行う上昇操作具24とを備えた移植機において、走行速度を検出する速度検出手段41を設け、制御部23が、上昇操作具24の植付作業機7上昇操作による植付作業機7の上昇作動を規制する規制モードを有し、速度検出手段41によって走行速度が所定速度以上になったことが検出されると、上記規制モードから、上昇操作具24の植付作業機7上昇操作による植付作業機7の上昇作動を許容する許容モードに移行する。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】圃場面の状況や刈取対象穀稈の植立状態等の作業状況の違いに応じて適切な刈取昇降制御を行うことにより、良好な刈取作業を行うことが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】刈取部における刈幅方向の異なる箇所に配備された複数の接地式の対地高さ検出手段及び目標対地高さ設定手段の情報に基づいて昇降操作手段を制御する刈取昇降制御を実行する制御手段が、手動操作式の制御モード切換指令手段の指令に基づいて、2個の対地高さ検出手段のいずれかが目標対地高さよりも低い値を検出すると刈取部を上昇させる少数検出時上昇処理モードと、全ての対地高さ検出手段が目標対地高さよりも低い値を検出すると刈取部を上昇させる多数検出時上昇処理モードとを切り換える。
(もっと読む)
乗用型水田作業機
【課題】乗用型水田作業機において、仕様の異なる複数の機種に亘って昇降操作具及び感度操作具を使用(兼用)する場合、部品点数を抑えながら適切に対処できるように構成する。
【解決手段】制御弁による水田作業装置の昇降操作を行うもので人為的に操作される昇降操作具29と、制御弁による水田作業装置の昇降操作の感度を変更するもので人為的に操作される感度操作具55とを、支持部材23,24,32,33,34に支持させて、支持部材23,24,32,33,34を機体フレーム21に連結する。
(もっと読む)
作業用車両
【課題】燃料噴射制御手段22を備えたエンジン10にて走行駆動される走行機体9と,これに昇降可能に装着され前記エンジンにて駆動される作業機2と,前記作業機の昇降用油圧機構5に作動油を供給するために前記エンジンにて駆動される油圧ポンプ17を備えた作業用車両において,前記油圧ポンプの小型化を図る。
【解決手段】前記作業機2を上昇作動しているときの速度が遅いか,又は,上昇作動しないとき,前記エンジンの回転数を前記燃料噴射制御手段にてアップする構成にする。
(もっと読む)
1 - 20 / 50
[ Back to top ]