
Fターム[2B304RB02]の内容
Fターム[2B304RB02]に分類される特許
1 - 20 / 24
苗移植機
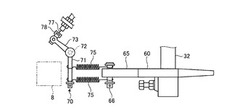
【課題】メカロックを発生させることなく、旋回時により確実に苗植付部を上昇させることのできる苗移植機を提供すること。
【解決手段】苗移植機1に、走行車体2に設けられて走行車体2を操舵するハンドル31と、走行車体2の後部に配設されると共に、苗を圃場に植え付ける苗植付部40と、苗植付部40を上昇させることができる苗植付部上昇機構50と、ハンドル31を操舵することにより回動するステアリングアーム60と、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができるオートリフト作動アーム70と、伸縮性を有してステアリングアーム60とオートリフト作動アーム70とを連結することにより、双方の距離が変化可能な状態でステアリングアーム60の回動をオートリフト作動アーム70に伝達する連結スプリング75とを備える。
(もっと読む)
苗移植機

【課題】
畦越走行時等に後側の苗植装置が上昇位置にあると、重心位置が高く、車体の前端部が上昇して、畦越走行姿勢が不安定となる。
【解決手段】
乗用走行車体5の後側に、リフトシリンダ6によって昇降のリフトリンク7を介して苗植装置8を連結し、前記リフトシリンダ6によって苗植装置8を下降させて底部のフロート9を接地滑走させながら均平土壌面に植付装置10により苗タンク11から繰出される苗を分離挿植すると共に、車体5の前端部にはこの車体5操作作用のグリップハンドル12を設けた苗植機において、前記グリップハンドル12を倒し操作することによって、苗植装置8を適宜位置まで下降させる構成とする。
(もっと読む)
田植機
【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
【解決手段】田植機は、植付部と、土壌反力検出装置と、制御部と、を備える。植付部は、植付爪を駆動することにより苗の植付けを行う。土壌反力検出装置は、植付爪が苗の植え付けを行うごとに土壌から受ける土壌反力を検出する土壌反力検出部と、植付爪の回転位相を検出する回転位相検出部を備えている。前記制御部は、前記土壌反力及び回転位相に基づいて植深値を算出する(S102)。そして制御部は、検出された植深値に基づいて、植付部を昇降制御する(S109)。
(もっと読む)
作業車両
【課題】本発明の課題は、前後進レバーによる面倒な前後進切替操作をなくし、単純なスイッチ操作のみで前後進の切り替えが行え、作業位置の位置合わせが容易に行える装置を具現することにある。
【解決手段】本発明は、走行車体(1)の後部に装着した作業機(10)を昇降可能に設け、この作業機(10)を昇降操作する昇降レバー(12)のグリップ部(12a)に押し込み操作時にのみ作動可能なスイッチ(13)を設け、該スイッチ(13)は現在の機体の進行方向を変更するように構成してあることを特徴とする作業車両とする。また、スイッチ(13)のスイッチ押し込み時は、車速を予め設定されたコントローラ設定値まで下げる構成とする。また、スイッチ(13)の押し込み操作時には、後進時における車速を段階的に下げる構成とする。
(もっと読む)
作業車両
【課題】昇降可能に装架した苗植付部や播種機等の作業装置の上昇操作を忘れた場合においても、機体後進による作溝機の詰まりや破損等の事態を招くことなく、圃場作業を円滑に進めることができる作業車両を提供する。
【解決手段】苗移植機は、作業装置4を昇降自在に支持するリンク機構およびその昇降位置検知部材と、作業装置4に設けた作溝器に粒状体を供給する粒状体供給装置5と、前後進の車速選択とリンク機構の支持高さ調節とを行う走行操作レバー73およびその走行操作検知部材73Sと、後輪回転検知部材と、報知部材71と、作業装置4に配置された報知停止スイッチ72とを走行車体に備えて構成され、リンク機構が所定高さ以下、走行操作レバー73が後進車速位置、後輪11が回転の3条件全てに該当した時に、報知停止スイッチ72の操作まで報知部材71を作動する制御を構成したものである。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 苗移植作業装置を上昇させると共に走行距離算出手段にて走行距離の算出を開始し、該走行距離に応じて、先ず苗移植作業装置が下降する指令を出力し、その後、前記走行距離に応じて、線引きマーカ(195)が下降する指令を出力する制御装置(170)を設けた。
(もっと読む)
トラクタ作業機の制御装置
【課題】本発明は、別の変更スイッチ等を設けることなく自動傾斜維持モードへの設定変更を容易に行えるようにする。
【解決手段】トラクタの車体1後部に作業機2をローリング可能に装着し、車体1に設けた傾斜センサ3の車体傾斜角検出に基づいてローリングシリンダ25を制御し、該ローリングシリンダ25のピストンロッドにより作業機2を水平に維持するトラクタ作業機の制御装置において、水平制御切換スイッチ33で作業機2を水平に維持する自動水平モードに設定した後に、作業機2の左右傾斜を調整する手動傾き調整スイッチ7,8の手動による傾き変更で水平に対する作業機2の傾斜角度を任意角度に設定可能にすると共に、この設定した傾斜角度を傾斜設定基準角度Aとして自動傾斜維持モードに移行して自動制御するようにしたことを特徴とするトラクタ作業機の制御装置の構成とする。
(もっと読む)
農作業機のリモコン装置
【課題】作業者に合うオフセット位置に作業部を容易に移動可能な農作業機のリモコン装置を提供する。
【解決手段】リモコン装置100は、作業部のオフセット位置を記憶する指令信号を送る作業位置記憶スイッチ101aと、農作業機の各種作動を制御する指令信号を送る指令スイッチと、各種作動を制御する指令信号データを記憶する記憶部111と、スイッチ101aや指令スイッチのオン時に指令信号データを記憶部111から読み込んで通信部112に送る制御部110を備える。制御部110は、スイッチ101aとスイッチ101bのオン時に、作業部のオフセット位置を記憶させる指令信号データを記憶部111から読み込み、その後のスイッチ101bのオン時に、作業部を現位置から記憶されるオフセット位置に移動させる指令信号データを記憶部111から読み込む指令信号データ選択部112aを有する。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
農業用作業車両
【課題】簡単な構成で旋回操作の開始及び終了を検出することが可能な農業用作業車両を提供する。
【解決手段】サイドクラッチ操作機構45は、ステアリングハンドル7が所定の操作量以上操作された場合に、サイドクラッチを切断する。クラッチセンサ49L,49Rは、サイドクラッチの作動状況を検出可能である。制御部は、植付部を昇降駆動するための昇降シリンダの駆動を制御する。植付クラッチは、植付部に対する駆動力の伝達の有無を切換可能である。また、前記制御部は、植付部の作動中において、植付クラッチの切断、サイドクラッチの切断、及び後進操作を、旋回時自動昇降制御の開始トリガとして検出可能である。そして、前記制御部は、開始トリガのうち何れか1つを検出すると、植付部を上昇させ、その後、前記サイドクラッチの接続を検出すると、植付部を下降させる。
(もっと読む)
作業機
【課題】後進時に作業部の上昇操作によって機体を上昇させる作業機において、機体の動作状況をオペレータに直感的に把握させることができる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの後進操作が検出されている場合において、刈取部が最上端位置にある状態で、刈取部昇降スイッチの上昇側操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。そして、制御部は、この機体上昇制御とともに、ブザーによって機体の上昇を報知する。この状態で、主変速レバーが前進操作に切り替えられたことが検出されると、制御部は、機体の高さを所定位置まで下降させる機体下降制御を行うとともに、ブザーによって機体の下降を報知する。
(もっと読む)
耕耘装置のリヤカバロック警報装置
【課題】耕耘装置のリヤカバーの上下動によって、この耕耘装置を車体に対して昇降して自動耕深制御を行わせる形態にあっては、前記リヤカバーの下動を規制することが多くあり、このリヤカバーの下動が規制されてロック状態にあるときは、このまま作業を行うことになるとロータリ耕耘装置が変形されたり、破損され易くなる。
【解決手段】トラクタ車体の後部に対してリフトアームにより昇降可能のロータリ耕耘装置に、この耕耘爪によって耕耘された土壌面を鎮圧均平するリヤカバーを設け、このリヤカバーの上下揺動によって耕耘装置を昇降して一定の耕深を維持制御する構成とし、前記リフトアームの下動によって耕耘装置を下降して前進走行したとき、リヤカバーの角度を検出するリヤカバセンサ7の入力によって、このリヤカバセンサ7が下り角を検出しているときは、リヤカバロック状態として警報する。
(もっと読む)
農作業機用無線受信制御装置及び農作業機用リモコン装置
【課題】無線受信制御装置の電源スイッチを入れたときにいきなり農作業機の動作が実行される可能性をなくし、安全性を高めることができる農作業機用無線受信制御装置及び農作業機用リモコン装置を提供する。
【解決手段】農作業機用無線受信制御装置70は、走行機体の後部に装着される農作業機に設けられ、農作業機の動作を指令する操作指令を無線信号によって指令するリモコン装置60からの信号を受信し、リモコン装置に返信の信号を送る通信手段と、通信手段によって受信された信号に従って農作業機の作動を制御する制御手段を備え、電源スイッチをオンしたときに、リモコン装置からの信号が受信圏内に存在するときには、自動的に制御手段への電力の供給を遮断する電源停止制御手段200aを備える。
(もっと読む)
作業車輌
【課題】ロータリ作業機のリヤカバーが畦畔等に意に反して当接する等の問題を解消し得る作業車輌を提供する。
【解決手段】制御部は、リヤカバー12の回動量検出値が、該リヤカバー12が接地しない状態より更にロータリ作業機3側に移動した値となった場合、誤操作信号を出力するように構成される。このため、トラクタが後進してリヤカバー12が畦畔17等に当たると、リヤカバー12の回動量検出値が非接地での値より更にロータリ作業機3側に移動した値となる。これにより、制御部が、誤操作が行われたものと判断して誤操作信号を発し、ブザーを作動させて警告音を鳴らしたり、エンジンを停止したりすることで、更なる後進によるリヤカバー12の破損を防止する。
(もっと読む)
乗用型苗植機
【課題】 適切な位置で苗の植え付けができる制御装置を備えた乗用型苗植機を提供すること。
【解決手段】 エンジンからの動力が伝達される伝動装置と、該伝動装置からの出力で駆動する左右の後輪と、該後輪への伝動を入り切りするサイドクラッチと、昇降自在の苗植付部と、走行距離を検出する走行距離検出センサと、操向操作用のハンドルを走行車体に設け、ハンドルの操作角度が所定値以上になると走行距離検出センサにより走行距離の検出を開始し、該走行距離が設定距離に達すると報知する報知装置を設けたことを特徴とする乗用型苗植機とした。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
作業車
【課題】 作業車において、被操作部の位置を検出するセンサーを備え、センサーの検出値に基づいて制御を行うように構成した場合、センサーの基準値が消失したり、センサーの基準値が別の値に変化したりしても、センサーの検出値に基づいて制御が適切に行われるように構成する。
【解決手段】 標準基準値K11〜K16を記憶する第2記憶手段39を備え、基準値K1〜K6が第1記憶手段38に記憶されていないエラー状態、又は第1記憶手段38に記憶されている基準値K1〜K6が標準基準値K11〜K16を含む所定範囲H11〜H16から外れているエラー状態であると、センサーの検出値及び標準検出値K11〜K16に基づいて制御を行う。
(もっと読む)
作業用走行車
【課題】作業用走行車のオペレータやサービスマンが、操縦部に備える液晶表示部を利用して、ユーザーマニュアルやサービスニュアル等に記載されている詳細情報や、緊急対応を要する異常が機体に生じた時の当該異常内容を確実に把握できるようにする。
【解決手段】作業情報K2を表示する液晶表示部46と、この液晶表示部46に表示する作業情報K2の内容を制御する制御部21とを備える作業用走行車において、前記液晶表示部46に表示する作業情報K2に併せて表示する二次元コードCによって、当該作業情報K2の詳細説明を読み取り可能に構成すると共に、緊急対応を要する異常が機体に生じた時は、前記液晶表示部46に二次元コードCによる割り込み表示がなされるように構成した。
(もっと読む)
移植機
【課題】植付に係る複数の作業装置を統括的に操作し、オペレータの負担を軽減し得るようにした移植機を提供する。
【解決手段】乗用田植機に対し、圃場端である枕地における作業にあっては、植付部、油圧制御装置、整地装置、或いはマーカ等の複数の作業部が同時に、枕地での制御状態となるように設定又は警報する1個の枕地スイッチ63を備えさせた。これにより、枕地での植付作業時に生じる複数の作業部の操作を1個の枕地スイッチ63によって統括的に行うことができる。
(もっと読む)
農用作業車
【課題】トラクタ本体が揺動源となり制御が不安定になることを防止し、且つ角速度センサの応答性の良さを生かして精度よく圃場面の起伏を検知して制御しうる農用作業車を提供する。
【解決手段】農用作業車1の左右の傾斜角の変化速度を検出する角速度センサ19と、前記角速度センサ19の検出値に基づいて、農用作業車1と対地作業装置14との相対角度を制御する制御手段60とを具備し、該制御手段60は前記対地作業装置14の姿勢変化による角速度を減少させるべく相対角度制御を行う農用作業車において、前記制御手段は、角速度センサ19の検出値が一定時間内に閾値を超える頻度が一定以上である場合は、前記対地作業機14の相対角度制御に対する角速度センサ19の検出値の影響を低下させる手段Aを設けた。
(もっと読む)
1 - 20 / 24
[ Back to top ]