
Fターム[2B396KA01]の内容
Fターム[2B396KA01]に分類される特許
1 - 20 / 41
穀粒排出装置
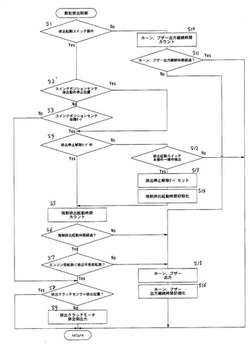
【課題】穀粒排出装置による排出作業の作業能率を高める。
【解決手段】切換状態検出手段(23)によって排出口(12)が下向きに開放されたの第1状態に切り換えられていることが検出された場合には、排出指令手段(38)による伝動接続状態への切換操作に基づいて伝動状態切換手段(43)を直ちに伝動接続状態に切り換え、切換状態検出手段(23)によって排出口(12)が下向きには開放されない第2状態に切り換えられていることが検出された場合に、排出指令手段(38)による伝動接続状態への切換操作が設定時間経過する前に解除されたときには、伝動状態切換手段(43)を伝動遮断状態に維持し、排出指令手段(38)による伝動接続状態への切換操作が上記設定時間を超えて継続したときには、伝動状態切換手段(43)を伝動接続状態に切り換える。
(もっと読む)
コンバイン

【課題】運転座席の後方に位置する装置を操作する操作レバーを運転座席の後方に構造面やコスト面で有利に配備することができるコンバインを提供する。
【解決手段】エンジンからの駆動力を脱穀装置6に伝達するよう運転座席の後方に配備した伝動ケース33が備える入力軸34に相対回転自在に外嵌するボス部51、及びボス部51から一体回転自在に延出するレバー本体52を備えて、操作レバー50を構成してある。
(もっと読む)
コンバイン
【課題】過度に加熱されず、耐久性に優れた排気装置と、大量の穀粒貯留できるグレンタンクを備えたコンバインを提案する。
【解決手段】上記課題は、脱穀装置(5)とグレンタンク(6)の間に形成される空間(S)にエンジン(9)の排気ガスを浄化するDPFユニット(40)を配置し、DPFユニット(40)の少なくとも上側及び横側を覆う覆い体(42)を設け、覆い体(42)の下部に開口部(A)を形成することにより解決される。
(もっと読む)
コンバイン
【課題】簡単な操作で所定量の穀粒を確実に排出することができるコンバインを提供すること。
【解決手段】グレンタンク内の穀粒を排出するアンローダと、アンローダから排出される穀粒の量を検出する検出手段20とを備え、アンローダによる穀粒の排出が開始されてから設定量の穀粒が排出されたことが検出手段20により検出されると、アンローダによる穀粒の排出を停止する制御手段22を備える。
(もっと読む)
コンバイン
【課題】周囲が暗い状況であっても遠隔操作装置の操作手段を視認することができ、当該遠隔操作装置の操作がし易いコンバインを提供する。
【解決手段】各種ボタン(複数の操作手段)を有し、前記各種ボタンの操作に応じて、無線通信を用いて排出オーガ32の動作についての遠隔指示を送信する遠隔操作装置80を具備するコンバイン1であって、遠隔操作装置80は、発光することによって前記各種ボタンを照らし出す内部LED84・84(発光手段)と、前記各種ボタンのうちのいずれかが操作されると、内部LED84・84を所定の発光頻度で発光させる制御部82と、を具備する。
(もっと読む)
コンバイン
【課題】作業者の意に反して排出オーガが自動的に動き出してしまうのを防止することができるコンバインを提供する。
【解決手段】排出オーガ32と、排出オーガ32を昇降又は旋回させるオーガ用アクチュエータと、排出オーガ32が載置されるオーガレスト21と、排出オーガ32がオーガレスト21に載置されていることを検出するオーガレストセットセンサ57と、複数の操作手段を有し、前記操作手段の操作に応じて、排出オーガ32の動作についての遠隔指示を送信する遠隔操作装置80と、前記遠隔指示に基づいて前記オーガ用アクチュエータを駆動制御する制御手段60と、を具備するコンバイン1であって、制御手段60は、前記複数の操作手段のうち特定の複数の操作手段(オートリターンボタン80k及びシフトボタン80m)が同時に操作された場合、排出オーガ32をオーガレスト21に載置させるように自動的に昇降又は旋回させる。
(もっと読む)
コンバイン
【課題】作業者が遠隔操作装置の電池残量を知ることができるコンバインを提供する。
【解決手段】グレンタンク17内の穀粒を外部に排出する排出オーガ32と、無線通信を用いて排出オーガ32の動作についての遠隔指示を送信する遠隔操作装置80と、遠隔操作装置80からの遠隔指示に基づいて排出オーガ32の動作を制御する制御手段60と、を具備するコンバイン1であって、制御手段60は、遠隔操作装置80の電池残量を、運転部9に設けられた表示装置25に表示させる。
(もっと読む)
コンバイン
【課題】遠隔操作装置がコンバイン本体から遠く離れている場合等における遠隔操作装置による排出オーガの操作を禁止することができ、操作ミスの発生を未然に防止することができるコンバインを提供する。
【解決手段】グレンタンク17内の穀粒を外部に排出する排出オーガ32と、各種ボタン(操作手段)の操作に応じて、無線通信を用いて排出オーガ32の動作についての遠隔指示を送信する遠隔操作装置80と、遠隔操作装置80からの遠隔指示に基づいて排出オーガ32の動作を制御する制御手段60と、を具備するコンバイン1であって、制御手段60は、遠隔操作装置80からの遠隔指示の受信レベルLが設定値L2(第一設定値)以上である場合に限り、当該遠隔指示に基づいて排出オーガ32を動作させる。
(もっと読む)
コンバインにおける穀粒排出用オーガの操作装置
【課題】コンバインにおいて操作性の向上を図れる穀粒排出用オーガの操作装置を提供する。
【解決手段】走行機体に備えられた穀粒排出用オーガの旋回並びに昇降を指令する手動操作式の指令スイッチ47,48と、穀粒排出用オーガの穀粒排出状態と穀粒停止状態とを切り替える揺動式の排出クラッチレバー45とを、運転座席13の横側の位置に配置された操作パネル27に設けてあるコンバインにおける穀粒排出用オーガの操作装置であって、操作パネル27は、第1操作パネル部27Aと、その前方で一段低く形成された第2操作パネル部27Bとを備えて構成してあり、排出クラッチレバー45は、第1操作パネル部27Aに前後に揺動自在に配置してあり、指令スイッチ47,48は、第2操作パネル部27Bの上面に配置してある。
(もっと読む)
コンバイン
【課題】排出オーガによる穀粒の排出状況を視認しながらオーガクラッチ操作具を操作しやすくする。
【解決手段】操縦部40の後方にグレンタンク60が配置され、グレンタンク60の後部と連通するように排出オーガ65が設けられたコンバインにおいて、排出オーガ65への動力伝達を断接するオーガクラッチ420を操作するためのレバー441を、グレンタンク60の機体外側の側面(右側面60y)であって操縦部40近傍に配置した。
(もっと読む)
移動農機
【課題】排出オーガの近くで作業している作業者の意に反して、機体側の作業者が排出オーガを操作することを防止するコンバインを提供する。
【解決手段】少なくともオーガ機体側リモコン30aからの指令に基づいて排出オーガ9を操作可能な通常モードと、オーガ先端側リモコン30bからの指令のみによって排出オーガ9を操作する優先モードと、の2つのモードを設け、オーガ先端側リモコン30bの操作に基づいて、制御部50を通常モードから優先モードに切換える。
(もっと読む)
コンバイン
【課題】穀粒を排出する際の遠隔操作装置による操作を簡素化し、作業性を向上させることができるコンバインを提供する。
【解決手段】排出オーガ32と、収納位置または排出位置に切り換え可能な穀粒排出筒体40と、オーガクラッチ33と、排出オーガ32がオーガレスト21に載置されていることを検出するオーガレストセットセンサ57と、無線通信を用いて排出オーガ32の動作についての遠隔指示を送信する遠隔操作装置80と、遠隔操作装置80からの遠隔指示に基づいて各種アクチュエータを駆動制御する制御手段60と、を具備するコンバイン1であって、制御手段60は、排出オーガ32がオーガレスト21から離れたことを検出した後、オーガクラッチ33を接続する旨の遠隔指示を最初に受信した場合、穀粒排出筒体40を排出位置に切り換えた後にオーガクラッチ33を接続させる。
(もっと読む)
コンバインにおけるオーガリモコンの配置構造
【課題】運転部にオーガリモコンを備えるコンバインにおいて、オーガの操作性を向上させる。
【解決手段】茎稈を刈り取る前処理部2と、刈り取った茎稈から穀粒を脱穀して選別する脱穀部3と、選別した穀粒を貯留する穀粒タンク4と、穀粒タンク4内の穀粒を先端部の排出口12から排出する旋回自在なオーガ5と、オーガ5を操作するオーガリモコン24と、を備えるコンバイン1において、オーガリモコン24を運転席7が設けられる運転部8に配置するにあたり、オーガリモコン24を、そのリモコンスイッチ面24aを正面に向けた状態で、運転席7の後方に起立する姿勢で着脱自在に設ける。
(もっと読む)
コンバイン
【課題】十字状の手動操作スイッチと自動旋回スイッチの位置を改善して、排出オーガの操作性を向上する。
【解決手段】排出オーガを左右方向に旋回及び上下方向に昇降する十字状に配置された手動操作スイッチB,C,D,Eの中央部に、排出オーガを排出位置又は収納位置に自動的に移動する自動旋回スイッチAを配置する。手動操作スイッチB〜Eの上方に、自動旋回スイッチAによる排出オーガの排出位置を選択する選択スイッチGと該選択された排出位置を表示するインジケータランプJ,K,Lを配置する。
(もっと読む)
操作装置
【課題】リモコンユニットをホルダに機械的に安定保持する。
【解決手段】リモコンケース40の裏面に、リモコンユニット31を手で持った際の把持位置の目安となる凹部40bを左右方向に横切るように形成する。線材を折曲して形成されるホルダ30は、底面支持部g,h、前面保持部i,j、背面保持部e,f、側面保持部k,l及び左右方向に延びる係止部mを有し、それぞれリモコンユニット31に当接し、かつ上記凹部40bが係止部mに係合して保持する。
(もっと読む)
コンバイン
【課題】穀粒タンクの容量減少を防止しながらタンク内穀粒の重心を低くすることができ、さらに穀粒タンクの底部管理に支障が生じないコンバインを提供する。
【解決手段】穀粒タンク6を走行機体上下向き軸芯まわりに閉じ姿勢と開き姿勢とに揺動させるタンク支持部を、機体フレーム2に設けてある。機体フレーム2にタンク収容空隙22を走行機体横外側向きに開口した状態で設けてある。穀粒タンク6が閉じ姿勢に支持された状態で穀粒タンク6の底部6aがタンク収容空隙22に入り込む。穀粒タンク6の底部6aに設けられたメンテナンス開口6bの蓋体30に作用する泥除けカバー35を底部6aの下方で、かつタンク収容空隙22に配設してある。
(もっと読む)
コンバイン
【課題】排出オーガを遠隔操作装置により操作する際に、排出オーガの作動が意図せず停止することを極力回避して、作業性の低下を抑制することができるコンバインを提供する。
【解決手段】前記遠隔操作装置80は、前記作動開始用操作手段(自動右セット・リターンボタン80a)が操作されると、動作確認信号を前記制御手段60へ間欠的に送信し、前記制御手段60は、前記動作確認信号を第一設定時間を超えて受信しなければ、前記作動用アクチュエータ(各アクチュエータ35・37)を駆動制御して、前記排出オーガ32の作動を停止させる。
(もっと読む)
コンバイン
【課題】先端排出筒の回動操作を自動制御操作と手動制御操作の双方で切換え操作できるようにし、手動操作手段による回動速度を自動操作手段による回動速度よりも遅くしたコンバインを提供する。
【解決手段】走行機体1と、刈取装置3及び脱穀装置5と、脱穀装置5で脱穀した穀粒を貯留するグレンタンク7と、グレンタンク7に連通して貯留穀粒を機外に排出する排出オーガ14とを具備したコンバイン100において、排出オーガ14のオーガ筒終端部に支軸を介して先端排出筒69を回動自在に連設し、先端排出筒69の上下方回動により排出オーガ14の終端開口部の開閉を行うべく構成し、しかも、先端排出筒69の上下方回動操作を自動制御操作により行う自動操作手段と、手動による制御操作を行う手動操作手段とを設けると共に、先端排出筒の手動操作手段による回動速度を自動操作手段による回動速度よりも遅くした。
(もっと読む)
作業車
【課題】移動体が所定の移動範囲を超えて移動したときにおいても、位置検出機構の故障を防止できる作業車を提供する。
【解決手段】アクチュエータMの駆動により移動可能な移動体8と、移動体8に取り付けられた被検出体31a、31bと、被検出体31a、31bに接触して揺動可能な接触子32aを有する位置検出機構32と、位置検出機構32にて被検出体31a、31bを検出するとアクチュエータMの駆動を停止させる制御機構とを設け、被検出体31a、31bに当接して移動体8の移動を規制する固定のストッパ33を設け、接触子32aが被検出体31a、31bに接触した状態を維持しながら、被検出体31a、31bがストッパ33に当接するように、位置検出機構32及びストッパ33を配置してある。
(もっと読む)
コンバイン
【課題】アクチュエータを介して穀粒排出オーガを旋回作動させるオーガ旋回操作具の操作方向と、穀粒排出オーガの旋回方向とを一致させることによって、オペレータによる直感的な該穀粒排出オーガの旋回操作を可能にする。
【解決手段】オーガ制御手段31により、ダイヤル式オーガ旋回操作具22の回動操作方向と、穀粒排出オーガ13の旋回作動方向とが一致するように穀粒排出オーガ13を旋回作動させるアクチュエータ17の動作を制御すると共に、当該ダイヤル式オーガ旋回操作具22の回動操作量に応じて穀粒排出オーガ13の旋回速度を変更すべく前記アクチュエータ17の動作を制御するように構成にした。
(もっと読む)
1 - 20 / 41
[ Back to top ]