
Fターム[2B396PA30]の内容
脱穀機要素−籾処理 (10,947) | 操作装置の構成又は配置 (964) | 操作対象装置 (260) | 穀粒搬送装置 (200) | 外部搬送装置 (183) | 機外への搬送装置(排出筒) (178)
Fターム[2B396PA30]に分類される特許
1 - 20 / 178
穀粒排出装置
【課題】穀粒排出装置による排出作業の作業能率を高める。
【解決手段】切換状態検出手段(23)によって排出口(12)が下向きに開放されたの第1状態に切り換えられていることが検出された場合には、排出指令手段(38)による伝動接続状態への切換操作に基づいて伝動状態切換手段(43)を直ちに伝動接続状態に切り換え、切換状態検出手段(23)によって排出口(12)が下向きには開放されない第2状態に切り換えられていることが検出された場合に、排出指令手段(38)による伝動接続状態への切換操作が設定時間経過する前に解除されたときには、伝動状態切換手段(43)を伝動遮断状態に維持し、排出指令手段(38)による伝動接続状態への切換操作が上記設定時間を超えて継続したときには、伝動状態切換手段(43)を伝動接続状態に切り換える。
(もっと読む)
コンバイン

【課題】機体側方からもオーガクラッチレバーを操作でき、作業効率を向上させることができるコンバインを提供する。
【解決手段】コンバイン1は、グレンタンク8に接続された排出用縦オーガ30を、機体外側に向かって傾倒させた状態で穀粒の排出を行うコンバイン1であって、回動基部39cが共通であり、着座操作部39aが回動基部39cから操縦部9に、側面操作部39bが回動基部39cから機体側方に、それぞれ延設されるオーガクラッチレバー39を設けた。
(もっと読む)
コンバイン
【課題】運転座席の後方に位置する装置を操作する操作レバーを運転座席の後方に構造面やコスト面で有利に配備することができるコンバインを提供する。
【解決手段】エンジンからの駆動力を脱穀装置6に伝達するよう運転座席の後方に配備した伝動ケース33が備える入力軸34に相対回転自在に外嵌するボス部51、及びボス部51から一体回転自在に延出するレバー本体52を備えて、操作レバー50を構成してある。
(もっと読む)
コンバイン
【課題】グレンタンクと排出オーガを備えたコンバインを、門扉等の障害物の下方を容易に通過できるものとする。
【解決手段】穀粒を貯留するグレンタンク(30)と、該グレンタンク(30)に貯留された穀粒を外部へ排出する排出オーガ(17)と、グレンタンク(30)の前側に位置する操縦席(20)を備えたコンバインにおいて、グレンタンク(30)と、機体上の格納位置に格納した排出オーガ(17)の先端部と、操縦席(20)の下側に備えたエンジン(8)に吸入する空気を浄化するプレフィルタ(11)とを、夫々の上端部が略同じ高さになるように配置する。
(もっと読む)
コンバイン
【課題】作業者が遠隔操作装置の電池残量を知ることができるコンバインを提供する。
【解決手段】グレンタンク17内の穀粒を外部に排出する排出オーガ32と、無線通信を用いて排出オーガ32の動作についての遠隔指示を送信する遠隔操作装置80と、遠隔操作装置80からの遠隔指示に基づいて排出オーガ32の動作を制御する制御手段60と、を具備するコンバイン1であって、制御手段60は、遠隔操作装置80の電池残量を、運転部9に設けられた表示装置25に表示させる。
(もっと読む)
コンバイン
【課題】遠隔操作装置がコンバイン本体から遠く離れている場合等における遠隔操作装置による排出オーガの操作を禁止することができ、操作ミスの発生を未然に防止することができるコンバインを提供する。
【解決手段】グレンタンク17内の穀粒を外部に排出する排出オーガ32と、各種ボタン(操作手段)の操作に応じて、無線通信を用いて排出オーガ32の動作についての遠隔指示を送信する遠隔操作装置80と、遠隔操作装置80からの遠隔指示に基づいて排出オーガ32の動作を制御する制御手段60と、を具備するコンバイン1であって、制御手段60は、遠隔操作装置80からの遠隔指示の受信レベルLが設定値L2(第一設定値)以上である場合に限り、当該遠隔指示に基づいて排出オーガ32を動作させる。
(もっと読む)
コンバインにおける穀粒排出用オーガの操作装置
【課題】コンバインにおいて操作性の向上を図れる穀粒排出用オーガの操作装置を提供する。
【解決手段】走行機体に備えられた穀粒排出用オーガの旋回並びに昇降を指令する手動操作式の指令スイッチ47,48と、穀粒排出用オーガの穀粒排出状態と穀粒停止状態とを切り替える揺動式の排出クラッチレバー45とを、運転座席13の横側の位置に配置された操作パネル27に設けてあるコンバインにおける穀粒排出用オーガの操作装置であって、操作パネル27は、第1操作パネル部27Aと、その前方で一段低く形成された第2操作パネル部27Bとを備えて構成してあり、排出クラッチレバー45は、第1操作パネル部27Aに前後に揺動自在に配置してあり、指令スイッチ47,48は、第2操作パネル部27Bの上面に配置してある。
(もっと読む)
コンバイン
【課題】周囲が暗い状況であっても遠隔操作装置の操作手段を視認することができ、当該遠隔操作装置の操作がし易いコンバインを提供する。
【解決手段】各種ボタン(複数の操作手段)を有し、前記各種ボタンの操作に応じて、無線通信を用いて排出オーガ32の動作についての遠隔指示を送信する遠隔操作装置80を具備するコンバイン1であって、遠隔操作装置80は、発光することによって前記各種ボタンを照らし出す内部LED84・84(発光手段)と、前記各種ボタンのうちのいずれかが操作されると、内部LED84・84を所定の発光頻度で発光させる制御部82と、を具備する。
(もっと読む)
コンバイン
【課題】作業者の意に反して排出オーガが自動的に動き出してしまうのを防止することができるコンバインを提供する。
【解決手段】排出オーガ32と、排出オーガ32を昇降又は旋回させるオーガ用アクチュエータと、排出オーガ32が載置されるオーガレスト21と、排出オーガ32がオーガレスト21に載置されていることを検出するオーガレストセットセンサ57と、複数の操作手段を有し、前記操作手段の操作に応じて、排出オーガ32の動作についての遠隔指示を送信する遠隔操作装置80と、前記遠隔指示に基づいて前記オーガ用アクチュエータを駆動制御する制御手段60と、を具備するコンバイン1であって、制御手段60は、前記複数の操作手段のうち特定の複数の操作手段(オートリターンボタン80k及びシフトボタン80m)が同時に操作された場合、排出オーガ32をオーガレスト21に載置させるように自動的に昇降又は旋回させる。
(もっと読む)
コンバイン
【課題】横オーガの収納状態を簡易且つ直接的に確認することができるようにすること。
【解決手段】受け台30が横オーガを収納するよう底部35aと該底部35aの両端から上方に延出された一対の縦向き部35bとで構成される収納空間Sを備え、収納空間Sを上方から覆う閉姿勢と、収納空間Sの上方を開放する開姿勢とに移動自在なアーム部41を、縦向き部35bに設け、アーム部41に、横オーガと接触する接触部分44を一体に設け、開姿勢において接触部分が収納空間Sの上方に配置され、横オーガを収納空間Sに収納するときの横オーガの接触部分44に対する上からの押圧によってアーム部41が揺動して閉姿勢となる。
(もっと読む)
コンバイン
【課題】作業者が運転席から簡単にコイルバネ長さを確認可能なコンバインを提供する。
【解決手段】走行機体の前部位置に運転座席12とエンジンとが配置され、これらの後方に穀粒を貯留するグレンタンク5が配置され、グレンタンク5から穀粒を排出するアンローダと、エンジンからアンローダに伝える駆動力の入り切りを行う排出クラッチCとが備えられ、排出クラッチCは、エンジンによって回転する駆動プーリ45とアンローダ6への入力プーリ46との間に巻回された伝動ベルト47と、伝動ベルト47に張力を加えるテンションローラ48とを備え、運転座席12近傍に配置された入り切り操作部材18,20とテンションローラ48との間に、少なくとも1本の操作ロッド53a,53bとコイルバネ54とが直列状に介装され、コイルバネ54が最も長い操作ロッド53aよりも上方に配置された構成とした。
(もっと読む)
コンバイン
【課題】アンローダを、格納姿勢から排出姿勢に切り換える途中の揺動姿勢に安定して保持すること。
【解決手段】アンローダFの揺動姿勢を維持する姿勢維持機構Jが、グレンタンクE側又はアンローダF側のいずれか一方に揺動自在に支持される連結ロッド80と、グレンタンクE側又はアンローダF側の他方に設けられる係合部材74とを備えて構成されており、アンローダFを揺動軸芯X周りに揺動させて格納姿勢から排出姿勢に切り換える途中の揺動姿勢において連結ロッド80の端部が係合する自動係合部75を係合部材74に設け、アンローダFの揺動姿勢を維持する。
(もっと読む)
コンバイン
【課題】格納姿勢にあるアンローダを排出姿勢に切換える際に、アンローダを無理なく排出姿勢に切換えることができるように構成すること。
【解決手段】自走機体にグレンタンクEが備えられ、このグレンタンクEの穀粒を排出スクリューにより排出するアンローダFが備えられ、アンローダFが、排出側端部を自走機体上方側に向かわせる格納姿勢と、排出側端部を自走機体外方側に向かわせる排出姿勢とに切換自在となるように揺動軸芯周りで揺動自在に備えられているコンバインであって、格納姿勢におけるアンローダFを、鉛直方向よりも自走機体内方側に傾斜する傾斜姿勢で保持する受け部材27と、傾斜姿勢にあるアンローダFを固定する姿勢ロック機構Kとを備える。
(もっと読む)
コンバイン
【課題】排出オーガに設けるカメラを保護すると共に、排出オーガを適正穀粒排出位置に位置決め操作する際の指標になるガードを備えたコンバインを提供する。
【解決手段】前処理部により刈取られた穀稈を脱穀3で脱穀し穀粒をグレンタンク内に貯留し、穀粒搬送オーガによって穀粒を排出するに、穀粒搬送オーガの排出オーガ7に設置したカメラ10によって穀粒排出状況を撮影し、映像をモニタに表示させながら穀粒排出作業を行うコンバインであって、排出オーガ7にカメラ10の外側を囲うガード30を設けると共に、ガード30の一部をカメラ10の撮像範囲内で撮像可能に位置させ、モニタに表示されるガード30を排出オーガ7の排出位置合せの指標とするように構成した。
(もっと読む)
コンバイン
【課題】排出オーガが自動的に昇降又は旋回することを防止すると共に、オートセット機能の作動時において遠隔操作装置(リモートコントローラ)の無線通信に使用される電波が本機に届かなく場合であっても、排出オーガの自動的な昇降又は旋回を緊急に停止させることができるコンバインを提供する。
【解決手段】前記制御手段60は、前記複数の操作手段(ボタン80a・80d等)のうち特定の操作手段(オートセットボタン84)への操作に応じて送信された遠隔指示を継続して受信している場合には、前記排出オーガ32を自動的に所定の高さまで上昇させた後、所定の方向へ旋回させる一方、その継続していた当該遠隔指示の受信が途絶えた場合には、当該排出オーガ32の自動的な上昇又は旋回を停止させる制御を実行するものである。
(もっと読む)
汎用コンバイン
【課題】走行機体にオーガを左右旋回可能且つ上下揺動可能に支持し、該オーガが下降して収納される収納位置を設けた汎用コンバインにおいて、上昇しているリールが、収納位置に収納されたオーガと接触することを効率的に防止するにあたって、オーガの長さを十分に確保できるとともに、走行機体の幅方向からのオーガの突出を抑制可能な汎用コンバインを提供することを課題としている。
【解決手段】オーガ9が、刈取部3及びリール17の上昇によって所定以上の高さに位置するリール17と側面視でラップする位置まで下降して収納される収納位置を設けるにあたって、オーガ9が平面視リール17とラップした第1収納位置Bと、オーガが平面視リールとラップしないように第1収納位置Bよりも左右外側に位置する第2収納位置Aとの少なくとも2つの収納位置を設けた。
(もっと読む)
汎用コンバイン
【課題】刈取部に設けたリールが所定以上の高さに上昇駆動された場合であっても、該リールと、オーガとの衝突を防止できるとともに、オーガの自動収納位置の切換え忘れを防ぐことにより、オーガの自動収納の誤操作によるリールとオーガの衝突も効率的に防止できる汎用コンバインを提供することを課題としている。
【解決手段】オーガ9が平面視リール17とラップした第1収納位置Bと、オーガ9が平面視リール17とラップしない第2収納位置Aとを前記制御部75に設定し、オーガレスト32を、第1収納位置Bのオーガ9を受止める第1受止め位置と、第2収納位置Aのオーガ9を受止める第2受止め位置とに切換可能に、走行機体2側に支持し、前記制御部75は、オーガレスト32が第1受止め位置の場合には、オーガ9が第1収納位置に収納され、オーガレスト32が第2受止め位置の場合には、オーガ9が第2収納位置に収納されるように自動制御を実行する。
(もっと読む)
コンバイン
【課題】排出オーガによる穀粒の排出状況を視認しながらオーガクラッチ操作具を操作しやすくする。
【解決手段】操縦部40の後方にグレンタンク60が配置され、グレンタンク60の後部と連通するように排出オーガ65が設けられたコンバインにおいて、排出オーガ65への動力伝達を断接するオーガクラッチ420を操作するためのレバー441を、グレンタンク60の機体外側の側面(右側面60y)であって操縦部40近傍に配置した。
(もっと読む)
コンバイン
【課題】簡易な構成により排出オーガの利便性及び操作性を向上させることができるコンバインを提供する。
【解決手段】制御手段60は、遠隔操作装置80における各種ボタンのうちオートリターンボタン83への押し操作に応じて送信された操作信号を継続して受信している場合には、排出オーガ32をオーガレスト21に載置させるように自動的に昇降又は旋回させる一方、その継続していた当該操作信号の受信が途絶えた場合には、当該排出オーガ32の自動的な昇降又は旋回を停止させる。
(もっと読む)
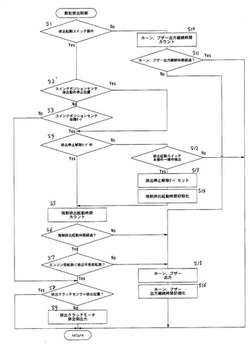
コンバイン
【課題】
走行車台の左右一側にグレンタンクを、左右他側に脱穀部を搭載し、左右の車体水平制御機構を備えたコンバインにおいて、グレンタンクの重量増加による、湿田等での走行不能状態を回避する。
【解決手段】
脱穀クラッチスイッチ(SW3)及び前記自動水平制御スイッチ(SW1)が入りの状態において、前記グレンタンク(5)搭載側のクローラ走行装置(2)の相対高さ検出手段(SE1)が走行車台(1)に対する当該クローラ走行装置(2)の設定高さ(H)以上の下降を検出した場合に、グレンタンク(5)からの穀粒排出を促すべく報知手段(32)を作動させるコントローラ(31)を設ける。また、設定高さ(H)を設定可能な報知高さ設定手段(SW2)を設ける。
(もっと読む)
1 - 20 / 178
[ Back to top ]