
Fターム[2D003CA03]の内容
掘削機械の作業制御 (15,843) | 駆動方式 (2,115) | 油圧系(空圧系を含む) (1,585) | ポンプ数 (447)
Fターム[2D003CA03]の下位に属するFターム
Fターム[2D003CA03]に分類される特許
61 - 80 / 291
建設機械の旋回駆動装置
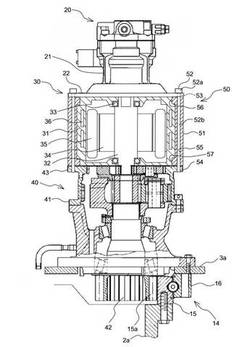
【課題】電動モータハウジングがアルミ合金製で強度が低くても、油圧モータ、電動モータおよび減速機をこの順番で重ねて強固に結合することができる建設機械の旋回駆動装置を提供すること。
【解決手段】油圧モータハウジング21、電動モータハウジング31、減速機ハウジング41の3つを組付ける組付け手段50は、ボルト52の呼び長さ部52bが油圧モータハウジング21のボルト孔53と補強部材51の通し孔とに差し通された状態で減速機ハウジング41の雌ネジ部54に螺合することに伴い、油圧モータ側段部56と減速機側段部57により油圧モータ20側と減速機40側から電動モータハウジング31を挟持することで、電動モータハウジング31を油圧モータハウジング21と減速機ハウジング41とに対して間接的に固定する。
(もっと読む)
作業機

【課題】少ない搭載機器でエンジンのアシストを行えて、その上、エンジンのアシストを行うための制御が簡単な作業機を提供する。
【解決手段】作業機の一例である油圧ショベルは、旋回用油圧モータ10にメインライン27を介して作動油を供給する主動力ポンプ4と、この主動力ポンプ4を駆動するエンジン6と、旋回用油圧モータ10からタンク24への戻りライン23に接続されて、エンジン6をアシスト可能なアシスト用油圧モータ7と、戻りライン23からタンク24へ分岐した分岐ライン25に接続されて、アシスト用油圧モータ7がエンジン6をアシストするトルクが予め設定されたトルク値以下となるように、戻りライン23の圧力を制限するリリーフバルブ16とを備える。
(もっと読む)
吐出量制御装置
【課題】可変容量型油圧ポンプの吐出量をより効率的に制御する吐出量制御装置を提供すること。
【解決手段】アキシャルピストンポンプ20の吐出量を制御する吐出量制御装置10は、その位置の変化に応じてアキシャルピストンポンプ20の吐出量を変化させるピストン111aを変位させる油圧閉回路アクチュエータ11と、ピストン111aの位置を検出する駆動状態検出装置12と、油圧閉回路アクチュエータ11を駆動する電動モータ13と、電動モータ13の回転を制御するモータ制御装置14と、を備え、モータ制御装置14は、駆動状態検出装置12が検出するピストン111aの現在位置と所望の吐出量に対応するピストン111aの目標位置とに基づいて電動モータ13の回転を制御する。
(もっと読む)
作業機の動作システム
【課題】一時的に作業機の動作を制限することによって作業機の盗難防止ができるようにする。
【解決手段】作業機2の動作システムは、作業機2の販売管理を行う管理サーバ6と、作業機2に設けられて当該作業機2の制御を行うと共に作業機2の通常制御をロックするロック信号が保持された制御装置と、作業機2に設けられ且つネットワーク8を介して管理サーバ6に接続可能な作業機用無線端末9とを備え、管理サーバ6は、ネットワーク8を介して作業機用無線端末9に通常制御のロックを解除するためのロック解除信号S1を送信するように構成され、作業機用無線端末9は、管理サーバ6が送信したロック解除信号S1を制御装置に出力するように構成されており、制御装置は、ロック解除信号S1が入力されるとロック信号による通常制御のロックを解除するように構成されている。
(もっと読む)
油圧式作業機
【課題】油圧式作業機械を装着した作業状態のままで他機の緊急脱出に使用できるとともに、他機からの油圧供給によって緊急脱出することができる油圧回路を備えた油圧式作業機を提供する。
【解決手段】走行装置及び作業機械を作動させる油圧回路20を備えた油圧式作業機において、油圧回路は、油圧ポンプ21と油圧制御部22との間から分岐した供給配管接続回路31と、供給配管接続回路と油圧制御部との間に設けられた供給流路切替弁32と、供給配管接続回路の分岐点と油圧ポンプとの間の配管に設けられたチェック弁33と、タンク23と油圧ポンプ21との間から分岐した戻り配管接続回路34と、戻り配管接続回路と油圧ポンプとの間に設けられた戻り流路切替弁35と、供給配管接続回路及び戻り配管接続回路にセルフシールカップリング17を介して油圧ホースを接続する油圧ホースを接続するホース接続部19とを備えている。
(もっと読む)
油圧装置
【課題】負荷の特性が変わっても油圧ポンプの吐出圧力を良好に制御することができ、さらに、負荷の要求流量の変動に対して俊敏に応答できる油圧装置を提供する。
【解決手段】油圧装置が備える制御装置5は、圧力センサ3が検出したパイロットポンプ1の吐出圧力に対するパイロットポンプ1の目標吐出圧力の比と、回転速度センサ4が検出したパイロットポンプ1の回転速度から求められるパイロットポンプ1の吐出流量とに基づいて、パイロットポンプ1の目標吐出圧力に対応するパイロットポンプ1の目標吐出流量を求めて、パイロットポンプ1の吐出流量がパイロットポンプ1の目標吐出流量に近づくように、電動モータ2の回転速度を制御する。
(もっと読む)
ハイブリッド建設機械
【課題】油圧ポンプが吸収するパワーに応じてエンジン回転数を変更しても、油圧ポンプの吐出流量が変化せず、ハイブリッドではない通常の建設機械と同様の操作感覚が得られるハイブリッド建設機械を提供する。
【解決手段】 油圧アクチュエータに作動油を供給する可変容量型の油圧ポンプ1、油圧ポンプ1を回転駆動できるように備えられたエンジン2、油圧ポンプ1を回転駆動できるように備えられた電動モータ3、エンコンダイヤル4、コントローラ4及び操作レバー5を備える。コントローラは、エンジン2の発生するパワーに応じて、燃料消費量が少なくなるようにエンジン2の回転数を変更し、エンジン2の回転数とエンコンダイヤル4のダイヤル位置と操作レバー5の操作量に基づいて、油圧ポンプ1の容量を変更する。
(もっと読む)
作業機械の油圧制御回路
【課題】作業機械の油圧制御回路に関し、アタッチメント装置の交換作業に伴う圧力設定の労力を軽減し、アタッチメント装置が要求する作動油流量及び作動油圧等に応じた油圧制御を容易とする。
【解決手段】アタッチメント装置に供給される作動油の流量及び流通方向を制御する制御弁4をベース油圧回路CB上に設ける。また、制御弁4よりも上流側のベース油圧回路CBから優先回路CPを分岐形成し、アタッチメント装置に供給される作動油の流量を優先的に確保する優先弁5を介装する。さらに、優先回路CPが接続されたベース油圧回路CBの一方からリリーフ回路CRを分岐形成し、リリーフ弁7を介装する。リリーフ弁7のリリーフ圧は、優先回路CP側の流量に応じて変更する。
(もっと読む)
自動作業機
【課題】 自動動作用の機器を用いて手動操作時のショックレス機能を実現することができる自動作業機を提供する。
【解決手段】 ブーム用の主切換弁21にはシャトル弁25A,25Bを介して手動減圧弁23A,23Bおよび比例減圧弁24A,24Bを接続する。手動減圧弁23A,23Bには、操作量を検出する操作検出器26A,26Bを接続する。比例減圧弁24A,24Bは、演算制御装置32からの電流指令信号I1,I2に応じて油圧信号Pa1,Pa2を出力する。演算制御装置32は、選択スイッチ35によって自動動作を停止した状態でブーム11の起動、停止を行ったときには、操作検出器26A,26Bからの操作信号m1,m2に基づいて、ショックを低減するための電流指令信号I1,I2を出力する。
(もっと読む)
旋回作業機械及び旋回作業機械の制御方法
【課題】 接触の可能性の高さに応じて、適切な制御を行うことが可能な旋回作業機械を提供する。
【解決手段】 アタッチメントが、基体に対して旋回可能に取り付けられている。旋回機構が、アタッチメントを旋回させる。制御装置が、旋回機構を制御する。進入物検出装置が、作業領域内へ進入した進入物の位置を検出する。制御装置は、アタッチメントの現時点の角速度及びアタッチメントの現時点の慣性モーメントの少なくとも一方に関わる第1の物理量、及び進入物検出装置で検出された進入物の位置に基づいて、アタッチメントの旋回動作を制御する。
(もっと読む)
電動式建設機械
【課題】電動システムの絶縁抵抗劣化が検知された場合でも、作業現場における機械及びオペレータの安全を確保できる電動式建設機械を提供する。
【解決手段】第1電動モータ201と第2電動モータ25と第1インバータ53と第2インバータ52と蓄電デバイス202とから構成される電動システムと車体との間の絶縁抵抗の劣化を検知する絶縁抵抗劣化検知手段90と、第1インバータ53と第2インバータ52とにそれぞれトルク増減指令を出力することで、第1電動モータ201及び第2電動モータ25の回転数を制御する制御装置80とを備え、制御装置80は、絶縁抵抗劣化検知手段90が電動システムの絶縁抵抗の劣化を検知した場合に、オペレータに電動システムの絶縁抵抗の劣化を報知し、第1電動モータ201の回転数を低下させる監視制御手段を備えた。
(もっと読む)
作業機械の作業範囲制御装置
【課題】作業機械の作業範囲制御装置に関し、フロント装置での作業時において安定性を向上させつつ作業性を向上させる。
【解決手段】下部走行体に対する上部旋回体の旋回姿勢を検出する旋回姿勢検出手段11L,11Rを設ける。また、フロント装置の作業範囲としての側方作業範囲を記憶する第一記憶手段32と、フロント装置の作業範囲として作業機械の機体中心から外端までの水平距離が該側方作業範囲よりも大きく設定された前方作業範囲を記憶する第二記憶手段33とを設ける。
さらに、フロント装置の作業範囲を制限する制御手段37を設け、該旋回姿勢が側方姿勢である場合に作業範囲を該側方作業範囲の内側に制限する。一方、該旋回姿勢が前方姿勢である場合に作業範囲を該前方作業範囲の内側まで拡大する。
(もっと読む)
作業機械の駆動装置
【課題】待機状態にある作業用アタッチメントの操作再開時における応答性の向上、部品交換にかかる作業負担の削減及び蓄電装置の電力保持時間の減少の抑制を図りつつ、燃費を向上することが可能な作業機械の駆動装置を提供する。
【解決手段】この作業機械の駆動装置は、エンジン2の動力を受けて作動し、圧油を吐出するメイン油圧ポンプ6と、メイン油圧ポンプ6から吐出される圧油を作業用アタッチメント100を駆動する作業用油圧モータ8へ供給する作業用圧油供給回路10と、メイン油圧ポンプ6の最大容量よりも小さい容量を有し、補助ポンプ用電動機20によって駆動されて作業用圧油供給回路10へ圧油を供給する補助油圧ポンプ30と、作業用アタッチメント100が待機状態のときに、エンジン2を停止させるとともに、バッテリ18の電力により補助ポンプ用電動機20を作動させて補助油圧ポンプ30を作動させるコントローラ46とを備えている。
(もっと読む)
建設機械の排ガス浄化システム
【課題】PMの発生量を抑えることにより、再生燃焼の頻度を少なくし、DPFの寿命を延ばすことを可能にする建設機械の排ガス浄化システムを提供する。
【解決手段】エンジンと、エンジンに動力連結されて、エンジンの発生した動力により発電を行う状態とエンジン及び駆動軸へのトルクアシストを行う状態とに制御可能なモータと、駆動軸に連結した油圧ポンプと、排ガス中に含まれるPMを捕集するDPFとを備えた建設機械の排ガス浄化システムにおいて、油圧ポンプの吐出圧力を検出する圧力センサと、エンジンの排煙濃度を検出するスモークメータと、圧力センサで検出した吐出圧力とスモークメータで検出した排煙濃度とに基づいて、相関特性と閾値を設定する第1の制御モードと、検出した排煙濃度が閾値を超えた場合に、モータの動力アシスト量を制御することで、排煙濃度を閾値以下に保つ第2の制御モードとを実行する制御装置とを備えた。
(もっと読む)
作業機械
【課題】センタジョイントの大型化を抑制できる作業機械を提供する。
【解決手段】センタジョイント6を介して、上部旋回体3に設けられている上部旋回体上部コントロールバルブ30のアクチュエータポート47cと、下部走行体2に設けられている下部コントロールバルブ50のメインポート64とを接続するように構成した。そして、上部コントロールバルブ30から下部コントロールバルブ50へ圧油を供給する流量制御弁31cの開口面積を、下部コントロールバルブ50のロードセンシング差圧PLS1を基に制御するように構成した。これにより、センタジョイント6の管路数を抑制できるので、センタジョイント6の大型化を抑制できる。
(もっと読む)
建設機械の作動油予熱機構と予熱方法
【課題】外部電源を用いることなく、燃料ロスを生じさせることなく作動油を予熱する。
【解決手段】油圧ショベルは、エンジン9と、油圧ポンプ13、14に作動油を供給する作動油タンク19を備える。更に作動油タンク19には作動油タンク19内の作動油を加熱するヒータ20を備え、作動油の温度を測定する温度センサー21を設ける。蓄電装置10からヒータ20に電力を供給する直流回路11に、導通と遮断を切り換える切り換えスイッチ23を設ける。温度センサー21で測定した作動油の温度が設定温度より低い場合に切り換えスイッチ23を導通させる制御手段25を設ける。蓄電装置10にはエンジンを始動させずに導通させる作動スイッチ22を設ける。
(もっと読む)
作業機械
【課題】油圧ポンプのピストンの焼付きを防ぎながら効率よく省エネが図れる作業機械を提供する。
【解決手段】斜板54の傾転角θを変化させることにより作動油の吐出量を変化させる可変容量型のピストンポンプ14を備えた作業機械である。操作装置11の操作に応じてアクチュエータ26が作動するように、傾転角θが所定の使用範囲内で制御される。傾転角θは、使用範囲の下限に位置する所定の第2傾転角B2と、第2設定角B2よりも小さい所定の第1傾転角B1とに保持可能である。エンジン13の始動時には、第2傾転角B2以上に保持され、その後に切り替わって第1傾転角B1に保持可能になる。
(もっと読む)
建設機械のポンプ吐出量制御回路
【課題】2つの油圧ポンプを有する油圧回路の場合に対しても簡単に適用することができ、かつ、電気系に不具合が発生した場合でも、簡単な制御で油圧ポンプ駆動用のエンジンをより適切な特性で運転することができる建設機械のポンプ吐出量制御回路を提供する。
【解決手段】パイロットポート30Aを有し、該パイロットポート30Aには油圧ポンプ12の吐出圧が入力され、油圧ポンプ12の吐出圧に応じて2次圧を出力するパイロット式油圧比例弁30を備え、電磁比例弁22にコントローラ16からの電気信号が送られていないときには、パイロット式油圧比例弁30の2次圧がレギュレータ14に入力されて、油圧ポンプ12の吐出圧に応じて該油圧ポンプ12の吐出量が制御される。
(もっと読む)
建設機械
【課題】 ブーム、アーム、及びバケット等の作業要素に荷重検出器を取り付けずに、作業要素の位置及び姿勢から掘削反力を求めることで、掘削動作における過負荷を判定し、作業要素の動作を制御することのできる建設機械を提供することを課題とする。
【解決手段】 掘削作業を行なう建設機械の制御部は、ブーム角度、アーム角度、バケット角度、及び土砂特性に基づいて、バケットに作用する土砂の掘削反力を算出し、算出した掘削反力が予め設定した上限値より大きいか否かを判定して掘削動作を修正すべきか否かを判断する。
(もっと読む)
ハイブリッド式作業機械の制御方法
【課題】油圧ポンプの入力側の動力を精確に求め、入力側の動力に基づいてエンジンの負荷を制御することを課題とする。
【解決手段】ハイブリッド式作業機械において、油圧ポンプ21をエンジン30の出力と電動発電機34の出力とで駆動する。油圧ポンプ21の入力側のトルクを推定演算により算出する。算出したトルクに油圧ポンプ21の回転数を乗算して油圧ポンプ21の入力側の動力を算出する。算出した動力に基づいて電動発電機34の出力を制御する。
(もっと読む)
61 - 80 / 291
[ Back to top ]