
Fターム[2D129CB01]の内容
Fターム[2D129CB01]に分類される特許
21 - 31 / 31
掘削装置および基礎杭施工時の拡大翼状態判定装置
【課題】機械式の拡大翼であったとしても、地上部において、拡大翼の拡径を簡便且つ確実に確認することが可能にする。
【解決手段】掘削ロッド1の先端部に対し拡径可能に支持される拡大翼4を備える基礎杭施工用の掘削装置による掘削で使用される。上記拡大翼4が拡径・縮径する際の可動部、若しくは掘削ロッド1の先端部に取り付けられて、拡大翼4の少なくとも縮径状態から拡径状態への変化を検出する傾斜センサ20と、その傾斜センサ20から信号を入力すると、掘削ロッド1を振動させて、弾性波として信号を送信する発信装置20と、地上部において、掘削ロッド1を伝搬してきた弾性波を検出する受信装置とを備える。
(もっと読む)
多成分粒子系における掘削作業を管理する方法およびシステム

【解決手段】 本発明は、全体として、多成分粒子系における掘削作業を管理する方法に関する。当該方法は、前記多成分粒子系に伴う複数の地球物理学的データおよび石油物理学的データを取得する工程と、前記複数の地球物理学的データおよび石油物理学的データに対応した少なくとも1つの特性を計算する工程と、前記多成分粒子系の弾塑性特性の少なくとも1つの測定値を取得する工程と、前記多成分粒子系の弾塑性特性の前記少なくとも1つの測定値を使って、前記多成分粒子系の少なくとも1つの弾塑性特性を計算する工程と、前記少なくとも1つの弾塑性特性と、前記複数の地球物理学的データおよび石油物理学的データに対応した前記少なくとも1つの特性との間に、少なくとも1つの相関をとる工程と、前記少なくとも1つの相関を使って、関心のある地層に含まれる堆積物の少なくとも1つの弾塑性特性を推定する工程と、前記堆積物の前記少なくとも1つの弾塑性特性を使って、前記関心のある地層の機械的完全性を評価する工程と、前記評価に基づき、前記掘削作業を調整する工程とを含む。
(もっと読む)
ロックドリル装置の運転制御方法およびロックドリル装置
ロックドリル装置(1)の運転制御方法およびロックドリル装置(1)。ロックドリル装置(1)のフラッシング媒体の流量(FLOW)を判定し、判定した流量(FLOW)に基づいてフラッシング媒体の圧力(p_FLOW)を調整することによりロックドリル装置(1)の運転を制御する。 (もっと読む)
削岩制御方法、装置および弁
削岩制御方法、装置および弁。本方法において、回転用モータ(20)の両端に作用する圧力差を別個の給送調整弁(30)の調整に使用し、これに基づいて、給送調整弁は給送用制御弁の制御圧力を調整する。本装置は、別個の給送調整弁(30)を含み、この調整弁は、回転用モータ(20)の両端に作用する圧力差の影響を受けて、給送用制御弁(7)の制御圧力を調整する。この弁(30)は、別個の制動要素(39)を含み、この制動要素は、弁(30)のスプール(30a)が回転用モータ(20)の両端に作用する圧力差の影響を受けて通常位置から離間したとき、スプール(30a)が通常位置に戻るのを遅くする。 (もっと読む)
さく孔機の操作指示装置
【課題】 複雑で高価な自動制御機器が不要で、必要に応じてオペレータが適切な判断とさく孔操作を行えるようにする。
【解決手段】 油圧クローラドリル1の打撃機構13、ダンパ17、回転機構9、及びフラッシング機構14の作動状況を検出する打撃圧力センサ31、ダンパ圧力センサ33、回転圧力センサ34、35、送り圧力センサ36、37、及びフラッシング圧力センサ38と、検出された作動状況の重要度を判断し、重要度に応じて段階的なオペレータへの操作案内情報をモニタ50、スピーカ52、外部表示灯53に出力するコンピュータ50とを備える。
(もっと読む)
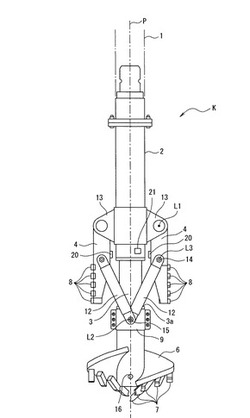
掘削作業ロッドの流体圧式作業具駆動装置における作業具作動確認装置
【課題】 シリンダ式拡大ヘッドにおいて、拡大翼進出の直接確認と、圧力流体の漏れがあっても確実確認を行う確認装置を提供する。
【解決手段】 掘削作業ロッドの下端部外部に、所定の作業を行うべき作業具を後退位置から進出作業位置に往復動自在に取りつけ、
上記掘削作業ロッドの下端部内に、上記作業具駆動用の流体圧駆動手段を内装し、該流体圧駆動手段は、外部から供給路を通じて供給される圧力流体により始点から終点に駆動される駆動体を往復動自在に有し、
上記駆動体の始点から終点への往復動により、上記作業具を後退位置から進出作業位置へ往復作動させる連動機構を備え、
上記流体圧駆動手段に、上記駆動体が終点に至って上記作業具を進出作業位置に作動させた時、該圧力流体を系外へ放出する放出口を設けると共に、上記圧力流体供給路内の圧力低下を検出する圧力計を設けた、
掘削作業ロッドの流体圧式作業具駆動装置における作業具作動確認装置。
(もっと読む)
バック・リーミング用自動制御システム
【課題】 「バック・リーミング」作業中のドローワークスの自動作業を行う制御システムを提供することにある。
【解決手段】 本発明の制御システムは、バック・リーミング作業中に或る吊上げ速度および吊上げトルクで掘管を移動させるホイストシステムを有する。オペレータ制御ユニットは、オペレータが少なくとも1つのバック・リーミングパラメータの所定値を入力することを可能にする。バック・リーミングパラメータセンサは、少なくとも1つのバック・リーミングパラメータの測定値を取得する。制御システムは、少なくとも1つのバック・リーミングパラメータをモニタする。ブレーキ組立体は、少なくとも1つのバック・リーミングパラメータの測定値と、少なくとも1つのバック・リーミングパラメータの所定値とが等しくなると、ドローワークスシステムの吊上げトルクに抵抗する。 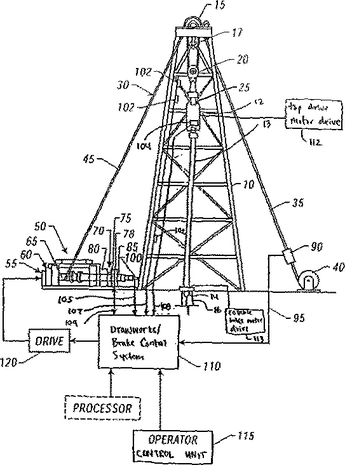 (もっと読む)
(もっと読む)
建柱車、建柱車を有する掘削装置および掘削方法
【課題】この発明は、簡易な設備を使用し、狭い場所でも施工ができて、施工の際に周囲に粉塵を飛散させない建柱車、掘削装置および掘削方法を提供することを目的とする。
【解決手段】上記の課題を解決するために、本発明の建柱車2は、掘削ロッド13を取り付けるためのアーム3と、コンプレッサー10より供給される空気の流量を調整する流量調整装置4と、コンプレッサー10より供給される空気に水分を混合するための動力噴霧器7とを有し、前記アーム、前記流量調整装置4および動力噴霧器7を操作するための操作台9を運転席8とは別個に有するものである。
(もっと読む)
液体圧力センサ式拡大ヘッド
【課題】 拡大翼の拡縮駆動手段として、スプリング無しの流体圧シリンダを使用し、該シリンダを作業ロッドに縦通した1系統の流体流路によって駆動し、それにより作業ロッドの継足し接続部の簡略化、小型化を可能とすると共に、拡大翼の開度を自由確実に保持することを可能とする
【解決手段】 ヘッドロッド内に、流体圧シリンダに送られる流体の圧力を感知するセンサとこの感知変動圧力を信号として使用し、流体圧シリンダ及び放出流路への流体流路を切替える電磁弁及びこれら駆動用バッテリーを装備したことを特徴とし、また、外部に配置された流体圧ポンプ及び少なくとも流体流路の開閉を行う切替弁を含む流体圧回路と接続され、流体流路に、流体圧シリンダへの流体量を計測する流量計を設け、この流量により拡大翼の開度を自由確実に保持できるようにしたことを特徴とする。
(もっと読む)
コイルドチュービングに光ファイバを用いるシステム及び方法
【課題】杭内ツール及びセンサと地表機器との間で情報を伝達するためのコイルドチュービングに配置された光ファイバ・テザーを有している装置及び係る装置を操作するための方法を提供する。
【解決手段】光ファイバ使用可能コイルドチュービング装置を用いて実行される坑井操作は、光ファイバ・テザーで地表装置から坑内装置に制御信号を送信し、光ファイバ・テザーで少なくとも一つの坑内センサから集められた情報を地表装置に送信し、又は光ファイバ・テザーで観測された光学特性を測定することによって情報を収集することを含む。光ファイバ・テザーに接続された坑内ツール又はセンサは、直接的に光学信号を操作するか又はそれに応答する装置を含みうるか又は通常の原理により動作するツール又はセンサを含む。
(もっと読む)
光ファイバ装着チューブ、その製造方法及びその使用方法
本発明は光ファイバ装着チューブ、及びその製造方法と使用方法に関するものである。光ファイバ装着チューブは、チューブの内部に展開された光ファイバ・チューブ、ダクト内に少なくとも1本以上の光ファイバを持つ光ファイバ・チューブ、坑道環境に適合するように通常は金属材料で構成されるダクトに関するものである。本発明はまた、チューブ内に液体を加圧注入し、加圧注入された液体の流れの中で光ファイバ・チューブを推進することによってチューブ内に光ファイバ・チューブを展開することにも関するものである。本発明は坑道に展開されたチューブ内に挿入された光ファイバを用いて坑道内と地面との通信も提供する。ある実施例においては、この通信は地面の無線通信システムと組み合わされる。また別の実施例では、チューブをコイル状チューブとして、光ファイバ・チューブをコイル状チューブの中に挿入し、このチューブをリールに巻き取ったり、坑道に展開したりすることも可能である。 (もっと読む)
21 - 31 / 31
[ Back to top ]