
Fターム[2F051DA02]の内容
特定の目的に適した力の測定 (5,882) | 測定できる力成分の数 (435) | 2分力 (90)
Fターム[2F051DA02]に分類される特許
1 - 20 / 90
入力インターフェイス装置
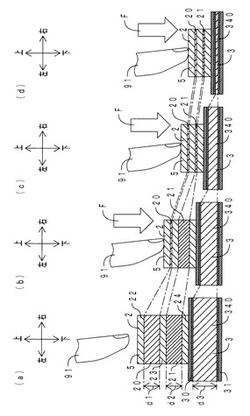
【課題】簡単に、外部機器に対して、複数のレベルの信号を任意に出力可能な入力インターフェイス装置を提供する。
【解決手段】入力インターフェイス装置は、表裏方向のばね定数が異なる複数の弾性層20、21が表裏方向に積層されてなる弾性部2を備え、表側から加わる荷重Fの変化による弾性部2の全体の表裏方向の圧縮荷重−変位特性が非線形であることを利用して、外部機器に対して、複数のレベルの信号を任意に出力可能とする。
(もっと読む)
センサ付車輪用軸受装置

【課題】 軸受部での検出荷重がブレーキ動作時のような車両の所定状況に影響を受けるのを補正して、車両の状況がブレーキ中など所定の状況にあっても正確な荷重を検出できるセンサ付車輪用軸受装置を提供する。
【解決手段】 車輪用軸受100に、この軸受に加わる荷重を検出する1つ以上のセンサ20を設け、これらセンサ20の出力信号を処理して信号ベクトルを生成する信号処理手段31と、前記信号ベクトルから車輪に加わる荷重を演算する荷重演算処理手段32を設ける。荷重演算処理手段32は、荷重の演算結果に影響する車両の所定状況の有無を判別して、その有無に対応した2種類の演算処理を行う機能を有する。荷重演算処理手段32で判別される車両の所定状況の有無とは、例えばブレーキのON・OFFである。
(もっと読む)
触覚センサー素子、触覚センサー装置、把持装置および電子機器
【課題】簡略な構成で剪断力の測定が可能な触覚センサー素子を提供すること。
【解決手段】開口部11A〜11Dを有する基板10と、開口部11A〜11Dを覆う支持膜12と、支持膜12上、かつ開口部11A〜11D上方に配置された検出部13A〜13Dと、検出部13A,13B上に配置された弾性部材16Aと、検出部13C,13D上に配置された弾性部材16Bと、を備え、基板10厚み方向で見た平面視で、開口部11Aの重心と開口部11Bの重心とを結ぶ線分と、開口部11Cの重心と開口部11Dの重心とを結ぶ線分とは離間し、かつ非平行であり、弾性部材16Aは、前記平面視で、検出部13A,13B、並びに検出部13A,13Bとに挟まれる領域の支持膜12の上を覆い、弾性部材16Bは、前記平面視において、検出部13C,13D、並びに検出部13C,13Dとに挟まれる領域の支持膜12の上を覆う触覚センサー素子2。
(もっと読む)
応力検出素子、センサーモジュール、および電子機器
【課題】生産性が良好で、かつ応力の検出精度が高い応力検出素子、センサーモジュール、および電子機器を提供する。
【解決手段】応力検出素子100は、互いに平行する第一直線部111A及び第二直線部111Bを有する開口部111を備えたセンサー基板11と、開口部111を閉塞する支持膜12と、第一直線部111Aに沿い、かつ、開口部111の内外に跨って支持膜12上に設けられる第一圧電素子13Aと、第一直線部111Aに沿い、かつ、開口部111の内外に跨って支持膜12上に設けられる第一弾性部141Aと、平面視において、第二直線部111Bに沿い、かつ、開口部111の内外に跨って支持膜12に設けられる第二弾性部141Bと、を具備し、第一弾性部141Aの第一弾性端部143A、及び第二弾性部141Bの第二弾性端部143Bは、弾性間ギャップGxを介して対向する。
(もっと読む)
センサモジュール
【課題】物体を把持した時の力と把持対象物との摩擦力を計測することができるセンサモジュールであって、軽量で安価、かつ省スペース設計であると共に、把持に最適なやわらかさ(粘弾性、超弾性、ゴム的性質)と、表面の摩擦によるグリップ性を備えたセンサモジュールを提供することを目的とするものである。
【解決手段】ベース基板と、前記ベース基板に固定保持された凸形状部を有する金属薄板と、前記金属薄板の前記凸形状部表面に貼着された複数個の歪みゲージと、前記金属薄板の前記凸形状部表面を覆う弾性材製カバー体とより成ることを特徴とする。
(もっと読む)
外力計測装置とそれを備えるクッション体
【課題】計測対象面に及ぼされる押圧力を広範囲で正確に計測することができると共に、計測対象面に及ぼされる剪断力も計測可能とされた、新規な構造の外力計測装置とそれを備えたクッション体を、部品点数の少ない簡単な構造で実現して、提供する。
【解決手段】一対の電極膜X,Yが導電性の弾性材によって変形可能に形成されており、外力計測用センサ12に対して一対の電極膜X,Yの対向方向で作用する押圧力を、外力計測用センサ12の静電容量の変化量に基づいて計測する押圧力計測手段50を有すると共に、外力計測用センサ12に対して一対の電極膜X,Yの面方向で作用する剪断力を、一対の電極膜X,Yの少なくとも一方の電気抵抗の変化量に基づいて計測する剪断力計測手段52,54を有する。
(もっと読む)
圧力センサおよび傾き検出装置
【課題】歩行補助装置の装着者の足裏にかかる荷重方向を感知することが可能な圧力センサを提供する。
【解決手段】本発明は、圧力により面抵抗が変化する感圧シートと、3つ以上の電極が設けられた電極シートとを備え、前記感圧シートの一方の面と、前記電極シートの一方の面とが重なり合って構成される圧力センサにおいて、前記3つ以上の電極は、前記電極シートの前記面上の互いに異なる位置に設けられ、且つ、前記感圧シートの前記面であって各前記電極間に位置する前記面を含む各領域が絶縁され、前記各領域の抵抗が測定可能に設けられている。
(もっと読む)
回動操作具の荷重変位特性測定方法および荷重変位特性測定装置
【課題】回転操作具の回動中心、および回動中心から測定点までの距離が不明であっても、荷重変位特性を測定可能にする。
【解決手段】回動して操作される回動操作具の荷重変位特性を測定する荷重変位特性測定方法であって、レバー200に、操作力を検出する力センサを有するグリップ110を固定し、グリップの近傍にレバー200と共に回動する測定点Pを設定し、任意の位置に固定された距離基準点Qを設定し、3点以上の位置において、測定点と距離基準点の距離s、および力センサ112の座標軸に対する角度θを測定し、距離sと角度θから測定点Pの回転半径rを算出し、回転半径rと操作力fと角度θとからレバー200の荷重と変位の関係を求める。
(もっと読む)
触覚センサ、把持装置、及びアクチュエータシステム
【課題】構造が簡素な触覚センサ等を提供する。
【解決手段】触覚センサ70は、第1電極73aと第3電極73cとの間の第1静電容量と、第2電極73bと第3電極73cとの間の第2静電容量と、に基づいて、受圧部72に加わった押付力(X軸方向の力)又は押付力によって生じる把持力(Y軸方向の力)を検出する。これにより、3つの電極のみで、押付力、把持力等の力を検出することが可能になる。そのため、構造が簡素な触覚センサ70、この触覚センサ70を備えた把持装置及びアクチュエータシステムを提供することができる。
(もっと読む)
センサー装置及びセンサー装置アレイ
【課題】せん断方向の応力変化を検出するセンサー装置において製造し易いセンサー装置を提供する。
【解決手段】センサー装置は、弾性部材11と弾性部材11の内部に配置されたセンサー部12を有し、センサー部12は、圧電性を有するシート状基板と該シート状基板の表面に形成された第1配線層と該シート状基板の裏面に形成された第2配線層とで構成されているトランスデューサー素子(A)131及びトランスデューサー素子(B)132を有し、該トランスデューサー素子(A)131と該トランスデューサー素子(B)132は、該シート状基板よって連結されており、該トランスデューサー素子(A)131に接する第1仮想接平面と該トランスデューサー素子(B)132に接する第2仮想接平面が交差する。
(もっと読む)
輪重及び横圧の測定方法及び輪重横圧測定用輪軸
【課題】 輪重及び横圧を連続測定できてしかもその測定精度に優れる輪重横圧測定用輪軸の提供。
【解決手段】 鉄道車両の走行時に車輪とレールとの接触で生じる輪重及び/又は横圧を測定するための輪重横圧測定用輪軸である。車軸(2)で連結された一対の内車輪(3)と、内車輪(3)の外周面にその内周面を対向させ内車輪(3)の外周で回転自在となるように支持され且つその外周面に踏面(5a)を有する回転環状体(5)と、少なくとも1つ以上を内車輪(3)の側面に接触するように与えられるセンサ手段(7a、7b)と、を含むことを特徴とする。
(もっと読む)
センサ装置及びロボット装置
【課題】検出部から出力される原検出信号から可撓体の振動に起因するノイズ成分を良好に除去し、フィルタ処理により得られる検出信号の位相の遅れを抑制する。
【解決手段】検出部101は、被測定対象の状態により変形する可撓体と、可撓体の変形量を検出し、検出結果を示す原検出信号102を出力するセンサとを有する。フィルタ部103は、フィルタ係数を用いて原検出信号102をフィルタ処理して得られる検出信号107を出力する。演算装置104は、原検出信号102に含まれる可撓体の振動数を演算により求める。変更部106は、フィルタ部103のフィルタ係数を変更して、フィルタ部103を、演算装置104により演算された振動数fを減衰させるフィルタとして機能させる。
(もっと読む)
力検知ユニット、圧電基板の製造方法及び加速度センサ
【課題】製造が容易で、小型で且つ薄型の精度の良い力検知ユニットを得る。
【解決手段】一方の主面の略中央部に凹陥部を形成することにより形成した薄肉部を有すると共に両端部に厚肉部を有した圧電基板と、前記圧電基板の他方の主面上の両端部寄りに少なくとも夫々一個ずつ形成したIDT電極と、を有した力感応素子と、前記力感応素子の前記一方の厚肉部の一方の主面側を接着剤により接着保持する、支持基板と、を備えた力検知ユニットであって、前記接着剤の厚みを利用して前記圧電基板の他方の厚肉部を前記支持基板上から離間させた片持ち支持とする。
(もっと読む)
3軸力センサパネル
【課題】パネル上の押した位置を検出すると共に、パネル自体がベース板に対してねじれる方向を検出可能な3軸力センサパネルを提供する。
【解決手段】ベース板30と、これと対向配置されるスイッチパネル40と、ベース板とスイッチパネルを繋ぐ3つ以上の連結体100と、連結体の少なくとも3つにそれぞれ設けられ、パネル面と直交するZ方向に作用する力に基づく応力を検出すると共にZ方向廻りにパネルがねじれる際の応力を検出するようになった力センサ200を有し、各力センサは、スイッチパネルの面上の押した位置に応じて、出力が変化するようになっており、この出力の組合せからパネル面上の押した位置の検出ができると共に、各力センサからパネルのベース面に対するねじれ方向を検出できるようになっている。
(もっと読む)
光ファイバセンサ
【課題】反射波長のシフト量の差を緩和することにより、該シフト量に対する補正処理を行うことなく、垂直応力を検出(算出)する。
【解決手段】FBGセンサ40において、応力方向変換部22x、22yは、同一の平坦部20を共有し、応力方向変換部22xは、平坦部20を基点として、該平坦部20に直交する+Z方向に指向して設けられると共に、応力方向変換部22yは、平坦部20を基点として、−Z方向に指向して設けられている。
(もっと読む)
触覚センサ
【課題】外力を測定することができる触覚センサを提供する。
【解決手段】風速等の外力を測定するための触覚センサであって、第1導電部材11と、第1導電部材11と所定の間隔で配置された第2導電部材12と、第1導電部材11を内部に備えた弾性部材13と、弾性部材13に設けられ、外力を受ける触覚部材14と、外力を検知するための検知部とを有する。弾性部材13は、触覚部材14が受けた外力によって変形し、これにより、第1導電部材11と第2導電部材12の間の静電容量が変化する。この静電容量の変化に基づいて外力を検知する。
(もっと読む)
3軸力センサ
【課題】操作部の倒れ方向及び倒れ度合いを検出するのと同時に、この操作部のねじれ度合いを検出可能とする3軸力センサを提供する。
【解決手段】ダイアフラム11と、ダイアフラムの面上に設けられこれを変形させる操作部20と、操作部の操作によってこれに作用する直交座標系のX軸方向とY軸方向の操作力を検出すると同時に、直交座標のZ軸方向のねじり力も検出する力センサ300を備え、ダイアフラム上の第1の直交座標のX軸とY軸上にそれぞれ原点に対して対称に配置され操作部のX軸方向とY軸方向への操作力を検出する力センサ素子と、ダイアフラム上であって第1の直交座標と原点及びZ軸を共通にしかつ第1の直交座標と異なる角度をなす第2の直交座標のX軸とY軸上にそれぞれ原点に対して対称に配置され操作部のZ軸廻りのねじり力を検出する力センサ素子を有する。
(もっと読む)
光ファイバセンサ
【課題】物体との接触面である被測定エリア全体に前記物体が接触して水平応力が付与される場合でも、該水平応力を検出することが可能となる。
【解決手段】FBGセンサ14A〜14Dにおいて、応力検出センサ部16は、平面視で、応力方向変換部18に内包されるように配置されると共に、応力方向変換部18から伝達された水平応力FHによってグレーティング26x、26yが伸縮し、一方で、グレーティング72x、72yは、被測定エリア22における応力方向変換部18の外方に配置されている。
(もっと読む)
光ファイバセンサ、圧力センサ及びエンドエフェクタ
【課題】比較的簡単な構造で、物体から付与される応力を複数の方向の成分(垂直応力、水平応力)に分離して検出することを可能とする。
【解決手段】FBGセンサ22は、特定波長の光を反射するグレーティング26x、26yを配列した光ファイバ20x、20yからなる応力検出センサ部28x、28yと、外部から付与された応力をグレーティング26x、26yを配列した方向(X方向、Y方向)の応力に変換してグレーティング26x、26yに伝達する応力方向変換部30とを有し、応力方向変換部30の周囲には、複数の応力検出センサ部28x、28yが配置されている。
(もっと読む)
変位センサ装置及び転がり軸受装置
【課題】確実に所望の変位検出の精度が得られる変位センサ装置及びこれを用いた転がり軸受装置を提供する。
【解決手段】検出対象物のまわりを取り囲むフレキシブルプリント基板22に、渦巻状で、その渦巻面が検出対象物と対向するコイル3を設け、このフレキシブルプリント基板22をリング状の支持部21に沿わせて支持する。そして、例えば止め具24によって、フレキシブルプリント基板22のコイル部22sを押さえ付け、浮き上がりを防止する。
(もっと読む)
1 - 20 / 90
[ Back to top ]