
Fターム[2F062DD33]の内容
機械的手段の使用による測定装置 (14,257) | 補正、補償、較正、調整 (452) | 方法 (71) | 補正値、補正率、補正曲線の設定 (69) | 機械的なもの (17)
Fターム[2F062DD33]に分類される特許
1 - 17 / 17
工作機械用測定方法

【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
重心測定システムおよび重心測定方法

【課題】被測定物の重心位置を正確に把握することができる重心測定システムおよび重心測定方法を提供する。
【解決手段】被測定物を載置する載置台、プローブ12およびこれらを三次元方向へ相対移動させる相対移動機構13を有し、被測定物の形状を測定する三次元測定機10と、載置台の重心位置を測定する重心測定装置20と、三次元測定機の座標系と重心測定装置の座標系とを一致させるとともに、三次元測定機によって測定された被測定物の形状データに、重心測定装置で測定された重心位置を合成するデータ処理装置30とを備える。
(もっと読む)
体積変化率及び/又は長さ変化率を測定する方法
【課題】測定時の環境温度が異なった場合に、温度変化による体積変化率及び/又は長さ変化率の影響を取り除き、固体自身の体積変化率及び/又は長さ変化率を得ることができる体積変化率及び/又は長さ変化率を測定する方法を提供する。
【解決手段】標準器を用いて、固体の体積変化率及び/又は長さ変化率を測定する方法において、標準器が、線膨張係数が8.8〜12.5×10-6/℃である材料からなることを特徴とする体積変化率及び/又は長さ変化率を測定する方法を構成とする。
(もっと読む)
取り付け式スケールバー
スケールバー加工品は、ベースと、構造部材と、構造部材に配置されて、中心を持つ球形物体を収容するように構成される少なくとも2つのネストと、それぞれが第1部位及び第2部位を含む少なくとも3つの取り付けアセンブリとを含むことができる。各取り付けアセンブリの第2部位は、ベースに連結される。各取り付けアセンブリの第1部位は、構造部材に連結される。各取り付けアセンブリの第1部位と第2部位は、互いに接している。各取り付けアセンブリは、回転中心を有する。3つの取り付けアセンブリの回転中心は、球形物体の中心と共通の平面を共有する。 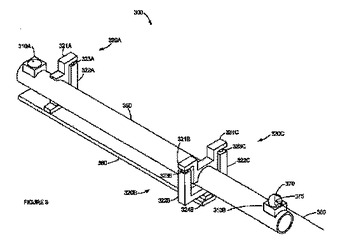 (もっと読む)
(もっと読む)
画像プローブの校正方法および形状測定機
【課題】画像プローブの校正方法を提供すること。
【解決手段】画像プローブ3の撮像方向を垂直にした状態で画像プローブ3および各測定子611A,611Bによりそれぞれ校正ゲージ62を測定し、画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係を求める。次に、一方の測定子611A,611Bにより基準球63を測定し、基準球63の位置を登録する。続いて、画像プローブ3の撮像方向を傾斜させた後、各測定子611A,611Bで基準球63を測定し、該測定結果と登録した基準球63の位置とから測定機1上の各測定子611A,611Bの位置を求める。画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係は既に取得しているので、求めた測定機1上の各測定子611A,611Bの位置から画像プローブ3の光軸周りの回転角度および画像プローブ3の位置を校正できる。
(もっと読む)
ロボットのツール位置検出方法、ロボットと対象物との相対位置検出方法、及びそれらの装置
【課題】ツール位置やロボットと対象物との相対位置を簡単かつ高精度に検出する。
【解決手段】ロボット2のアーム7先端のツール取付部7eに球面部8aを有するツール8を取り付け、ツール取付部7eから球面部8aの中心までのツールベクトルの成分に未知数を設定し、球面部8aを平板16に対してツール8の姿勢を変えて少なくとも未知数の数と同じ回数当接させ、その当接時のロボット2のアーム7の関節角度に基づいて当接時のツール取付部7eの位置をそれぞれ求め、特定の座標系において、平板16のZ位置と球面部8aの曲率半径Rcとの和から得られる球面部8aの中心のZ位置が、ツール取付部7eのZ位置とツールベクトルのZ成分との和から得られる球面部8aの中心のZ位置に等しいことを意味する連立方程式を少なくとも未知数の数と同じ回数連立させ、その連立方程式を解くことでツールベクトルの成分を求める。
(もっと読む)
被測定物の高さ調整装置及びこれを備えた表面形状測定装置
【課題】回転自在の測定用テーブル上において、良好な測定精度を維持しつつ、測定位置における被測定物の高さを簡易な操作により調整可能とする。
【解決手段】ワークWの高さを調整する高さ調整装置10が、測定用テーブル2上に昇降自在に設けられた昇降体82と、昇降体を支持するとともに、測定用テーブル表面に対して傾斜した傾斜面81aを有し、当該傾斜面の昇降体に対する相対移動により昇降体を昇降させるテーパブロックとを備え、昇降体は、前記被測定物を支持する球状部材102と、傾斜面に回転自在に当接するローラ103とを有する構成とする。
(もっと読む)
自動寸法測定装置
【課題】1回のマスター較正でスケール内での絶対寸法測定が可能な3次元寸法・形状測定機能を備えた自動寸法測定装置を提供する。
【解決手段】フローティング機構11が、案内テーブル7と、案内テーブル7上の案内レール12に係合し、直動軸受からなる案内部29を介して案内テーブル7に対してX軸方向に相対移動可能に配設されたフローティングテーブル30を備えている。X軸検出ヘッド5はX軸の不動部位に固定され、X軸検出ヘッド5に対峙するX軸スケール15がフローティングテーブル30に配設されている。測定プローブ13は、フローティングテーブル29に配設され、コイルばねまたはエアシリンダからなる弾性支持部31、31によって挟持されているので、測定プローブ13がワーク16に接触した時に適度な測定荷重を付与した状態で計測することができ、高精度で安定した測定結果を得ることができる。
(もっと読む)
基準尺を挟持して固定するための装置
位置測定装置の基準尺(2)は、挟持部材(1)を用いて支持体(3)上に固定されている。挟持部材(1)は、第一の挟持力(F1)で基準尺(2)を取付面(31)上に押し付ける第一のスプリングアーム部(11)を有する。挟持部材(1)は、取付面(31)に対して垂直な方向に延びるストッパ面(32)上に第二の挟持力(F2)で基準尺(2)を押し付ける第二のスプリングアーム部(12)を有する。挟持部材(1)を支持体(3)上に固定することによって、第一の挟持力(F1)と第二の挟持力(F2)が一緒に生み出されている。 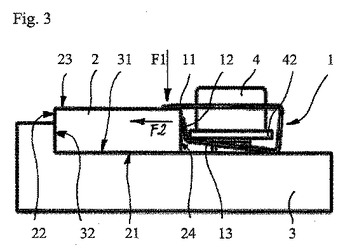 (もっと読む)
(もっと読む)
3次元測定機用寸法標準器
【課題】 3次元測定機に簡単にセットすることができるとともに、3次元測定機の測定範囲を最も長い対角線長に近い測定長で高精度で測定することが可能な3次元測定機用寸法標準器を提供する。
【解決手段】 石英ガラスまたは単結晶石英によって形成されている細長い丸棒状のロッドの両端部に3次元測定機A1のプローブA6先端を接触させる基準測定面を有する不変鋼で形成された一対の基準部材7Bが固定されている棒状ゲージ2と、前記棒状ゲージ2を傾斜した上面で支持する支持体3から構成されており、前記支持体3を、3次元測定機A1の測定テーブルA2上に置かれたマスタブロックMの上面に取り付けて3次元測定機A1の指示誤差の測定を行う。
(もっと読む)
軸受測定装置
【課題】軸受のアキシアル隙間を測定すること。
【解決手段】外輪32を支持する外輪受108と、外輪受108に支持された外輪32に、ばね122の弾性力を荷重として印加するプレッシャリング118と、エアシリンダ126のロッド132に固定されたボビン134と、ボビン134に固定された内輪押し板138と、ボビン134に装着されて、弾性力を内輪押し板138を介して内輪30に付与するばね136と、内輪30上に配置されて、内輪30の浮き上がりに応答して、上方に移動する検出軸142と、検出軸142の移動に伴う浮き上がり量を外輪32のアキシアル隙間として検出する検出器146を備えている。
(もっと読む)
ベッド・オブ・ネイル式形状測定におけるピンの高さ調節
システム、方法、装置及び製品は、ガラス基体等といった測定対象についてのベッド・オブ・ネイル式の形状測定ゲージにおけるピンの高さ調節の系統的な計算及び実行に関し、特に、液晶ディスプレイ(LCD)用板ガラスの製造に用いられるガラス基体等の物体の表面の無重力形状を測定するためのベッド・オブ・ネイル式ゲージの使用に関する。1つ以上の実施形態は、測定中に表面を支持するよう動作可能な複数のピンを備え得る。各ピンは、測定信号を送るよう動作可能なロードセルと、調節信号を受け取り、該調節信号を受け取ったらピンの高さ調節を実行するよう動作可能な高さ調節器とを備える。ピンの高さ調節の実行により、表面が各ピンに及ぼす測定された力が、無重力形状に対応する目標とする力に近づくよう、ピンが系統的に配置される。 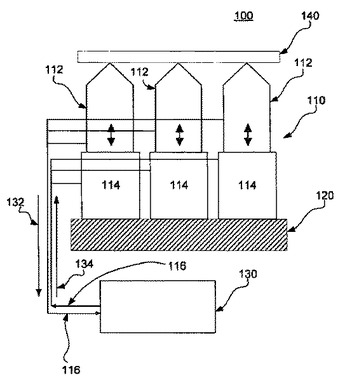 (もっと読む)
(もっと読む)
寸法計測装置
【課題】例えば円錐面を含む穴の深さ位置を計測する寸法計測装置において、被測定穴の軸線と計測装置側の接触ステムの軸線の整列を確実に実施すること。
【解決手段】寸法計測装置は、スピンドル51を具備する直線寸法測定器50と、被測定物10に接する球状の先端部64を有する接触ステム60と、接触ステム60を支持するステム保持装置70と、直線寸法測定器50とステム保持装置70とを往復移動させる駆動部90と、を具備し、ステム保持装置70は、接触ステム60を測定軸線Ax方向に移動可能に支持する軸受部材71と、接触ステム60と軸受部材71とを互いに反対方向に付勢する付勢手段75と、軸受部材71の一端面72aに平行に対向するスラスト支持平面78aを有するスラスト支持部材76と、スラスト支持平面78aと軸受部材の一端面72aとの間に配設された複数の球体80と、を具備する。
(もっと読む)
ハニカム構造体の検査方法、及び、ハニカム構造体の製造方法
【課題】測定条件の影響が少なく、かつ、短時間で正確にハニカム構造体の長手方向の形状を計測することができるハニカム構造体の検査方法を提供する。
【解決手段】
多数のセルがセル壁を隔てて長手方向に並設された柱状のハニカム焼成体からなるハニカム構造体の検査方法であって、基準面と、上記基準面に垂直に設けられたレール、及び、上記レールに沿って移動する探針からなる測定子とを備えた接触式計測機を準備し、上記基準面に上記ハニカム構造体の一方の端面を接触させ、上記測定子を上記基準面に近づける方向に移動せしめて上記ハニカム構造体の他方の端面に上記探針を接触させることにより、上記ハニカム構造体の長手方向の形状を計測することを特徴とする。
(もっと読む)
表面性状測定装置
【課題】傾斜を有する被測定物表面を高精度に倣い測定する表面性状測定装置を提供する。
【解決手段】 測定部210により被測定物表面を倣い走査する。測定部210は、接触部212を先端に有するスタイラス211と、接触部212が被測定物表面に当接した際のスタイラス軸方向の測定力を検出する測定力検出手段を有する。移動機構は、測定力を一定にしながら測定部210を被測定物表面に対して相対移動させる。
移動機構は、接触部210を回転中心として測定部210を回転させてスタイラス211を被測定物表面に垂直にする回転機構400を備える。
(もっと読む)
形状測定器
【課題】 接触力を変えながら小さな接触力で被測定物の表面形状を測定できる形状測定器を提供する
【解決手段】 測定プローブ32を傾斜θを持たせて支持する。測定プローブ32の後退する力は、傾斜θによって生じているため、自重mに比べて遙かに小さいmgsigθとなる。一方、エアシリンダ40で押出力Fcで付勢する。このため、ワークWへの測定プローブ32の接触力は、測定子自重傾斜成分mgsigθと、エアシリンダ40の押出力Fcとの差分(F=Fc−mgsigθ)になるので、接触力を非常に小さくすることが可能である。更に、エアシリンダ40で押出力Fcを変えることで、接触力を変えることができる。
(もっと読む)
歯車歯面形状測定機の検査・校正アーティファクト
【課題】 1)高精度な形状測定機で容易に、トレーサブルな値付け測定をすることができ、2)歯車歯面形状測定機の検査・校正を短時間で容易に、正確に、かつトレーサブルに行うことができ、3)歯車歯面の精度規格とも整合して検査・校正結果を得ることができる、歯車歯面形状測定機の検査・校正アーティファクトを提供する。
【解決手段】 検査・校正アーティファクト10は、略円筒形状あるいは略円錐体形状の本体部14と、本体部14の両端から本体部14と同軸に延在する軸12と、本体部14の外周面14xに90°又は120°ごとに、あるいはそれより既知のある微小角度ずらした位置に形成され、径方向外側に突出する4つ又は3つの測定対象となる歯16a〜16dとを備える。
(もっと読む)
1 - 17 / 17
[ Back to top ]