
Fターム[2F062JJ01]の内容
機械的手段の使用による測定装置 (14,257) | 検出値の処理 (803) | 座標変換 (20)
Fターム[2F062JJ01]に分類される特許
1 - 20 / 20
3次元表面形状算出装置およびそれを用いた自動施工装置ならびにその方法
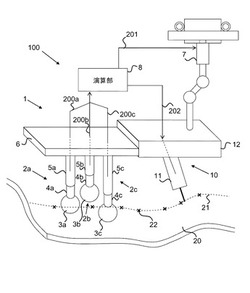
【課題】1回の走査で精度よく測定対象表面の3次元表面形状を算出することができる3次元表面形状算出装置を提供する。
【解決手段】3次元表面形状算出装置1は、センサ基台6と、先端に球形状を1方向に移動できる変位センサ2と、原点を定めた3次元空間で平面方程式算出点22を囲む3点の接触点に変位センサ2を接触させてセンサ基台6を移動させる演算部8とを備え、演算部8は、センサ球2の移動距離である変位信号200およびセンサ基台6の原点からの方向ならびに距離を用いて3点の球中心座標を求め、1点の球中心座標から他の2点の球中心座標へ向かう2つのベクトルの外積である法線ベクトルの単位ベクトルに球形状の半径を乗したベクトルを求め、このベクトルを球中心座標に加えて接触点の座標を求め、この接触点の座標が囲む平面方程式を算出する。
(もっと読む)
表示装置を用いた運転者頭部位置検出方法

【課題】自動車等の車両には、運転者が快適且つ安全に運転を行うための車内設備が備えられているが、これらの車内設備は運転者の身長又は体型によって最適な設定が異なるため、運転中の運転者が最適な設定を得るために車内設備を操作すると安全運転の妨げになるといった問題が生じる。
【解決手段】車両内に備えられた複数の点のうち、基準点を移動させて前記複数の点を重ね合わせることで運転者の頭部の位置を検出する頭部位置検出方法において、前記頭部位置検出方法はナビゲーション又はエアコン、オーディオ、車両状態等の少なくとも1つの情報の表示を行うディスプレイを有した表示装置を用いて行われ、前記表示装置によって検出された前記運転者の頭部の位置に基づいて車内設備の設定変更を行う。
(もっと読む)
形状測定装置
【課題】プローブの運動の履歴に基づく測定誤差を補正することができ、測定精度を向上させることができる形状測定装置の提供。
【解決手段】形状測定装置1は、装置本体2と、装置本体2を制御する制御手段3とを備える。装置本体2は、プローブ4を備え、プローブ4は、被測定物に接触する測定子を先端側に有する棒状のスタイラス41と、スタイラス41の基端側を支持する支持機構42とを備える。支持機構42は、スタイラス41の位置を検出するプローブセンサ421を備え、スタイラス41を一定の範囲内で移動可能に支持する。制御手段3は、プローブセンサ421にて検出されるスタイラス41の位置を入力とし、測定子、及び被測定物の接触する位置を出力とする伝達関数に基づいて、測定値を算出する。
(もっと読む)
重心測定システムおよび重心測定方法
【課題】被測定物の重心位置を正確に把握することができる重心測定システムおよび重心測定方法を提供する。
【解決手段】被測定物を載置する載置台、プローブ12およびこれらを三次元方向へ相対移動させる相対移動機構13を有し、被測定物の形状を測定する三次元測定機10と、載置台の重心位置を測定する重心測定装置20と、三次元測定機の座標系と重心測定装置の座標系とを一致させるとともに、三次元測定機によって測定された被測定物の形状データに、重心測定装置で測定された重心位置を合成するデータ処理装置30とを備える。
(もっと読む)
表面形状の測定方法
【課題】プローブを用いて、容易かつ高精度に被検物の表面形状を測定することができる表面形状の測定方法を提供する。
【解決手段】プローブと被検物とを相対移動させることにより、被検物の表面形状を測定する表面形状測定方法は、被検物の第1の領域の第1表面形状データを取得する第1取得工程と、第1表面形状データと少なくとも一部が重複する被検物の第2の領域の第2表面形状データを取得する第2取得工程と、第1表面形状データのうち、第2表面形状データと重複する領域のデータに対して、近似関数による当てはめを行って近似曲線を取得する近似曲線取得工程S20と、近似曲線を用いて第2表面形状データの補正量を算出する補正量算出工程S30と、算出された補正量に基づいて、第2表面形状データ全体を座標変換する座標変換工程S40と、第1表面形状データと、座標変換が行われた第2表面形状データとを統合する工程とを備える。
(もっと読む)
補正ボール径算出方法および形状測定装置
【課題】解析精度を向上させることができる補正ボール径を算出できる補正ボール径算出方法および形状測定装置を提供すること。
【解決手段】本発明によれば、基準ゲージを回転させながら該基準ゲージを測定することにより補正ボール径を算出する。そのため、基準ゲージを回転させながら測定することにより生じる誤差を含んだ補正ボール径を算出することができる。また、基準ゲージの複数の高さ位置を測定することにより各高さ位置毎に補正ボール径を算出する。そのため、測定する高さ位置に応じて生じる誤差を含んだ補正ボール径を各高さ位置毎に算出することができる。従って、被測定物Wを回転させながら測定した際に、これらの誤差を含んだ補正ボール径を用いて被測定物Wの形状等を解析することで、被測定物Wの形状等を高精度に解析することができる。
(もっと読む)
表面性状測定装置、その接触子モデル生成方法、及びプログラム
【課題】高精度で3次元接触子モデルを生成可能な表面性状測定装置、その接触子モデル生成方法、及びプログラムを提供する。
【解決手段】表面性状測定装置は、被測定物に先端が接触可能な接触子24と、接触子24を互いにX軸、Y軸、Z軸に沿って移動させる制御部41とを備える。制御部41は、接触子24を被測定物の表面に倣うように駆動すると共に接触子24の先端位置を疑似測定点Piとして取得する。制御部41は、基準ワーク4を接触子24で倣い測定して3次元接触子モデルM2を算出する。制御部41は、接触子24を、Z軸を中心として回転駆動する。制御部41は、回転駆動される接触子24の複数の回転位置のそれぞれにおいて、接触子24をX軸方向及びZ軸方向に沿って移動させて基準ワーク4を倣い測定して疑似測定点Piを取得し、取得された疑似測定点Piに基づいて3次元接触子モデルM2を算出する。
(もっと読む)
三次元測定機
【課題】補正パラメータの算出にかかる時間を短縮することができ、測定精度を向上させることができる三次元測定機の提供。
【解決手段】三次元測定機は、測定子211Aを有するプローブ21と、駆動機構と、補正パラメータ算出装置とを備える。補正パラメータ算出装置は、測定子211Aの回転変位を拘束することなく測定子211Aの並進変位を拘束する拘束手段6と、プローブ21の移動量が0となる位置を基準位置として設定する基準位置設定部と、拘束手段6にて基準位置に測定子211Aを拘束した状態でプローブ21を複数の測定点に移動させて各測定点における基準位置からのプローブ21の移動量、及び駆動機構の移動量を取得する測定点情報取得部とを備え、測定点情報取得部にて取得される情報に基づいて、プローブ21の座標系を補正するための補正パラメータを算出する。
(もっと読む)
形状測定装置、及び形状測定方法
【課題】回転テーブルの面振れや、形状測定装置の直角度等に起因する測定誤差を適切に補正することができ、測定精度を向上させることができる形状測定装置の提供。
【解決手段】三次元測定機1は、既知の径を有する基準器に対して設定された基準器座標系で基準器の径を軸方向に沿って測定する基準器測定部51と、基準器測定部51にて測定された基準器の径、及び既知の径の差と、基準器測定部51の測定位置とに基づいて補正関数を生成する補正関数生成部52と、被測定物に対して設定された被測定物座標系で被測定物を測定する測定部53と、測定部53にて測定された測定値を、基準器座標系に変換する第1変換部54と、第1変換部54にて基準器座標系に変換された測定値を、補正関数生成部52にて生成された補正関数にて補正する補正部55と、補正部55にて補正された測定値を、被測定物座標系に変換する第2変換部56とを備える。
(もっと読む)
測定装置
【課題】
構造が簡単で安価に製造でき、持ち運びが便利であると共に被測定物の任意の位置に接触子を接触させて任意の部分の寸法を容易に測定することができる測定装置を提供する。
【解決手段】
測定装置1は、被測定物Aの寸法を測定するもので、被測定物Aを載置する載置面3を備えた基台2と、基台2の載置面3と略平行の面で回動可能となり、且つ長手方向に摺動可能となるようにして基台2に取り付けられたアーム部材35と、基台2の載置面3と略直角の方向に移動可能となるようにして、アーム部材35の先部に取り付けられた接触子45と、アーム部材35の回動角度Pを検出する第1の検出手段21と、アーム部材35の長手方向の移動距離Nを検出する第2の検出手段39と、接触子45の移動距離Mを検出する第3の検出手段49とを有する。
(もっと読む)
ねじ形状測定方法
【課題】一般的な三次元測定機を利用してねじ形状の各種特性値の測定を行うことができるねじ形状測定方法を提供すること。
【解決手段】測定すべきねじ形状を有するワークが装着される三次元測定機と、この三次元測定機に装着される倣いプローブと、この倣いプローブに装着されかつワークに接触される接触部を有するスタイラスとを用い、前記倣いプローブの倣い測定軸線と前記ねじ形状の中心軸線とを合わせる軸合わせ工程(処理ST4)と、前記スタイラスを前記ねじ形状に接触させつつ前記倣いプローブを前記倣い測定軸線に沿って移動させる倣い測定工程(処理ST5、ST8)と、前記倣い測定で得られた測定データから前記ねじ形状の各種特性値を演算する演算工程(処理ST7、ST9)と、を実行する。
(もっと読む)
走査ヘッドの較正装置および方法
電動の関節式走査ヘッド(16)における角度測定スケールを、基準加工品(40;60;80)を用いて較正する方法が記載される。この方法は、走査ヘッド(16)に取り付けられた走査プローブ(28)などの表面検出デバイスを走査ヘッド(16)の少なくとも1軸(A1,A2)のまわりに回転させ、基準加工品(40;60;80)に対し異なる複数の角度方向に表面検出デバイスを移動させる工程を含む。次に、その異なる角度方向のそれぞれで、表面検出デバイスにより、基準加工品(40;60;80)の少なくとも1つの特性を測定する工程が実行される。そして、測定された基準加工品(40;60;80)の特性を用い、また付加的に既知または較正済みの基準加工品(40;60;80)の特性を用いて、走査ヘッドの少なくとも1つの測定スケールに対する誤差マップまたは関数を生成する。この方法は、走査ヘッド(16)を移動させるために、座標測定機械(14)などの座標位置決め機械の使用を含むことができる。基準加工品(40;60;80)は、単一の特徴部または配列された複数の特徴部(46;66)を含むことができる。 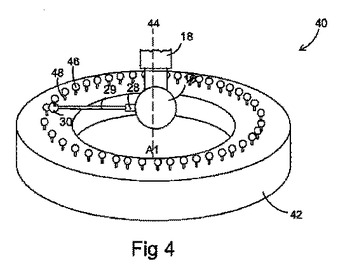 (もっと読む)
(もっと読む)
一定の走査速度を備えた走査プローブを用いた測定対象物の表面の走査方法
【課題】摩擦力に起因するプローブの先端の摩耗の問題を解消する。
【解決手段】座標測定機の支持体3を所定の軌道36に沿って動かし、この支持体3に対して走査プローブ2を動かし、さらにコントローラでそれらの動きを調整することで、走査プローブ2の先端部25の走査経路37に沿った動きを一定の走査速度に維持し、走査プローブ2の先端部25にかかる偏向力を小さくし、加速段階における大きな摩擦力に起因する過熱を抑える。
(もっと読む)
三次元形状測定装置
【課題】表裏を同時に共通の座標系で超高精度に測定し、非球面レンズの表裏面の傾きと偏心を超高精度に算出する。
【解決手段】XYZ座標を形成するXYZ参照ミラー2、3、4と、Zエアスライドガイド部11を上下で共通とすることにより、上下の測定座標系を完全に同一とした。さらに、スタイラス5の変位検出ユニットを回折格子を使って薄くし、プローブの支持を滑車と定荷重バネを使うことによりさらに薄くし、構造が単純、小型化、製作容易にした。
(もっと読む)
ワーク測定面の角度良否検査装置
【課題】1個のワークの内径部や外径部に測定面が複数あり、各測定面について端面に対する角度の良否検査が要求されたときに、その検査を所要時間を短縮して効率的に行えるようにすることを課題としている。
【解決手段】ワークWを、端面fを受けて水平な基準面3a上に位置決めしてセットする治具2と、変位測定用ゲージ6を昇降機構7で垂直方向に移動させ、測定面Aに接触させたゲージの接触子6aのこのときの径方向振れ量を電気信号に変換して出力する測定機8と、この測定機から検出信号を受けて測定面Aの端面fに対する直角度などの良否判定を行うパーソナルコンピュータとを組み合わせ、前記ゲージ6を複数設けて各ゲージによる複数の測定面の良否検査を同時に行うようにした。
(もっと読む)
差分較正
機械に装架された計測プローブ(10)を較正する方法が記述される。計測プローブ(10)は、ワークピースに接触する先端(16)を備えたスタイラス(14)を有する。方法は、プローブアウトプット(a、b、c)を機械座標系(x、y、z)に関連づけるプローブ較正マトリクスを決定することを含む。方法は、第一の機械データを得るために第一のプローブ偏位(d1)を用い、第二の機械データを得るために第二のプローブ偏位(d2)を用いて、較正アーティファクト(18)を走査する工程を含む。第一および第二の機械データは、いかなる機械誤差も実質的に除去される完全なプローブ較正マトリクスを得るために用いられる。有利には、方法は、第一および第二の機械位置データの差は既知であるとの仮定に基づいて、完全なプローブマトリクスを数学的に決定する。  (もっと読む)
(もっと読む)
位置測定方法
【課題】簡単かつ正確に被測定面の位置を測定可能な位置測定装置を提供する。
【解決手段】被測定面上に測定点P1〜P4を4つ以上設定し、フランジ面14a内に各測定点P1〜P4を頂点とした第1〜第4の仮想三角形X1〜X4を複数形成するとともに、各仮想三角形X1〜X4を含むフランジ面14aの位置を三点測量方法により算出する。これにより、測定作業が簡単でかつ、測定点P1〜P4が3つの場合に比べてフランジ面14aの位置を正確に測定することができる。
(もっと読む)
変位測定方式及び方法
【課題】工事進行中の現場で他の測定パラメータと同時性のある測定を実行することができる変位測定方式及び方法を提供することである。
【解決手段】被測定体の測定点間を連結する連結ロッド4,5,6と、当該ロッド長を測定する変位計10,11,12と、ロッドに取りつけた傾斜計13,14,15を備える。前記連結点を前記被測定体に固定し、前記変位計で測定されたロッド長と前記傾斜計で測定された傾斜角から得られる区間変位を累積し、各測点の縦横座標を求める。
(もっと読む)
ワークピースの座標を確定するための方法
本発明は、ワークピース(9)に対して不動に位置決めされている第一座標系を固定すること、 ワークピース(9)の第一座標を、第一座標測定装置(3)を使用することにより測定すること、 ワークピース(9)の第二座標を、第二座標測定装置(5)を使用することにより測定すること、そして 第一座標と第二座標から、共通の座標組を、ワークピース(9)に不動に位置決めされた座標系に対する第一座標系においてあるいは第二座標系において作ることを特徴とするワークピース(9)の座標を確定するための方法に関する。特に多数のワークピース(9)の座標はワークピース(9)の製造工程および/または加工工程の最中および/または後に確定することができる。さらに本発明はワークピース(9)が両座標測定装置(3,5)を用いた測定の間に位置および/または姿勢が変化する場合にも関する。 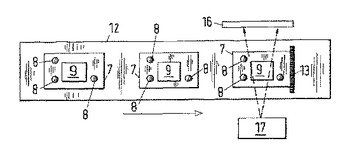 (もっと読む)
(もっと読む)
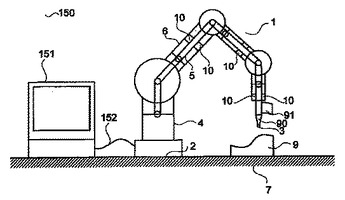
外骨格を有するCMMアーム
ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
 (もっと読む)
(もっと読む)
1 - 20 / 20
[ Back to top ]