
Fターム[2F063BA08]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の種類 (1,844) | ステアリングホイール、ハンドル (281)
Fターム[2F063BA08]に分類される特許
201 - 220 / 281
回転角度およびトルク検出装置
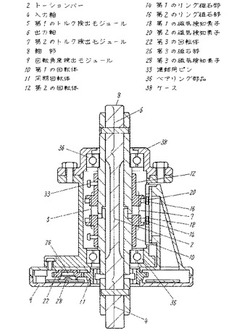
【課題】車種の違いに起因して軸部の直径や機構が異なっても、部品の取り替えが簡単で、容易に取り付け可能な回転角度およびトルク検出装置を提供することを目的としている。
【解決手段】トーションバー2を有する軸部8と、この軸部8の回転角度を検出する回転角度検出部と、軸部8のトルクを検出するトルク検出部とを備えており、トルク検出部および回転角度検出部は、各々、第1のトルク検出モジュール5、第2のトルク検出モジュール7、回転角度検出モジュール9として構成するとともに軸部8の周囲に配置した構成である。
(もっと読む)
回転角度検出装置

【課題】歯車のがたつき、バックラッシなどにより検知精度の向上が困難なものに対し、簡易な構成で多回転する回転体の回転角度を高精度・高分解能に検出できる回転角度検出装置を提供することを目的としている。
【解決手段】ステアリングシャフト等のトーションバーを有する軸部1と、この軸部1の回転角度を検出する回転角度検出部2と、トーションバーの捩り角度を検出するトルク検出部3とを備え、トーションバーの捩り角度は軸部1の回転角度よりも小さくするとともに、トーションバーの捩り角度に基づいて軸部1の回転角度を検出する構成である。
(もっと読む)
回転角度およびトルク検出装置の製造方法
【課題】取付時における位置ずれを防止して、誤検知の発生を抑制した回転角度およびトルク検出装置の製造方法を提供することを目的とする。
【解決手段】2つの金属リング体を第1、第2の回転体10、12に保持させる保持工程と、第1、第2の回転体10、12を着磁機11に装着して、金属リング体の周面方向に極性の異なる磁極を交互に配置した同一の着磁パターンを金属リング体に着磁して第1、第2のリング磁石部14、16を形成する磁石形成工程と、第1、第2の回転体10、12を互いに対向させて軸部8に連結する連結工程とを備え、第1、第2の回転体10、12および着磁機11に貫通孔を設け、各々の貫通孔13を対応させて位置決めピン15を挿入し位置決めする構成である。
(もっと読む)
回動デバイス位置検知システムおよび方法
【課題】大寸の単一の絶対位置センサを適用することなく、回動デバイスの絶対的位置を決定し得るシステムおよび方法を提供する。
【解決手段】モータの絶対的位置を決定するシステム。該システムは、第1および第2の多重磁極式磁気リング、第1および第2の処理ユニット、および、少なくとも一個の外部センサを含む。上記第1の多重磁極式磁気リングは、上記モータの回りに同心的に位置決めされると共に、複数の磁極対を有する。上記第2の多重磁極式磁気リングは、上記第1の多重磁極式磁気リングの回りに同心的に位置決めされると共に、少なくともひとつの磁極対を有する。上記第1処理ユニットは上記第1の多重磁極式磁気リングの近傍に位置決めされることで、上記第1の多重磁極式磁気リングの上記複数の磁極対の内のひとつの磁極対の全体に亙る角度的位置を決定する。上記センサは上記処理ユニットの外部にて上記第2の多重磁極式磁気リングの上方に位置決めされ、該第2の多重磁極式磁気リングの上記磁極対の状態を表す。上記第2処理ユニットは、上記角度的位置および上記状態に基づき、上記モータの絶対的位置を生成する。
(もっと読む)
ステアリング装置
【課題】操舵トルク検出用のトルクセンサと舵角検出用の回転角センサとのコンパクトな配置が実現可能なステアリング装置を提供する。
【解決手段】ステアリングホイールと舵取機構とを連結するステアリング軸に加わる操舵トルクを、捩れ検出手段により検出されるステアリング軸の捩れに基づいて求めるトルクセンサ4と、ステアリング軸と一体回転する内歯車50に噛合する外歯車51,52の回転角度を回転角検出手段により検出し、該回転角検出手段の検出結果に基づいてステアリング軸の回転角度を求める回転角センサ5とを備えるステアリング装置において、回転角センサ5の筐体57の保持部57dにトルクセンサ4の捩れ検出手段を嵌合保持させてある。この結果、回転角センサ5とトルクセンサ4とを隣接配置することができ、両センサ4,5の設置に要する軸長方向の長さを短縮することができる。
(もっと読む)
回転角検出装置
【課題】小型のサイズで絶対舵角と相対舵角信号の両方を出力することができる操舵角検出装置を提供する。
【解決手段】ステアリングシャフトの周期数を含めた絶対舵角αを出力する操舵角検出装置において、サンプリング期間ごとに絶対舵角の変化量を算出し、サンプリング期間と絶対舵角の変化量に基づいて変化間隔を設定し、予め設定されたパルスパターンに基づいて上記の変化間隔で変化するA相、B相およびZ相のパルスを生成する。例えばサンプリング期間10msにおいて絶対舵角の変化量が2°のとき、絶対舵角範囲の所定単位0.5°で変換した変化幅4単位でサンプリング期間10msを除して得た2.5msをパルスの変化間隔として、これらのパルスを相対舵角信号として出力する。多数のスリットを備える大径の円板を必要としないから、装置全体を小型にして形状の自由度を拡大できる。
(もっと読む)
回転センサ
【課題】組付け性に優れかつコストの低減を図るとともに広範囲にわたって検出精度に優れた回転センサを提供する。
【解決手段】回転するシャフトSに取付けられ、周方向に沿って幅が変化する導電性のセンシング部を有するロータと、交流励磁電流が流されることで前記ロータのセンシング部との間に磁気回路を形成する励磁コイルと、磁性材から成形されかつ前記励磁コイルを保持するコア本体とを有し、固定部材に取付けて前記ロータのセンシング部に対して前記シャフトの軸線方向に間隔をおいて対向配置される固定コアとを備えた回転センサにおいて、前記固定コアがセンシング部の周方向異なる位置に配置された少なくとも2つの固定コアからなり、各固定コアの励磁コイルを励磁する交流電流の位相を所定角度だけ互いにずらしたことを特徴としている。
(もっと読む)
回転センサ
【課題】歯車のバックラッシによる角度誤差を極力抑えつつ、360°を超える角度の検出が可能な回転センサを提供する。
【解決手段】被測定用回転体の回転角度をこれ以外の測定用回転体を用いて測定する回転センサであって、被測定用回転体150と連動してこれとほぼ同一の回転数で回転する第1の測定用回転体110と、第1の測定用回転体と連動して回転し、回転数が第1の測定用回転体より小さい第2の測定用回転体120を備え、第1の測定用回転体及び第2の測定用回転体には径方向磁界を有する永久磁石がそれぞれの中心に配置され、更に各永久磁石が発生する磁界の径方向の変化を検出可能な箇所に所定数のホール素子112,122が各測定用回転体の回転と独立してそれぞれ配置され、磁界検出素子の出力を用いて各測定用回転体の回転角度を検出することで被測定用回転体の回転角度を測定する。
(もっと読む)
トルク検出装置
【課題】回転軸に加わる回転トルクと共に回転軸の回転角度を検出可能としながら、軸方向長さの短縮要求に応え得るトルク検出装置を提供する。
【解決手段】回転軸としての第2軸1bに樹脂製の保持筒32を介して固定された回転部材としてのヨークリング3,3を備えるトルク検出部1の一側に、保持筒32の延長部に周設した大径の内歯車60と、この内歯車60に噛合する小径の外歯車61,62と、これらの回転角度を検出するための磁気センサ65,66とを備える回転角検出部6を並設する。
(もっと読む)
変位センサ及び回転センサ
【課題】温度による影響を受けることなくその他の誤差要因に基づく影響を精度よく監視し、信頼性に優れた回転センサを提供する。
【解決手段】回転するシャフトSに取り付けられ周方向に沿って幅が変化する導電性のセンシング部20を有するロータ10と、交流励磁電流によりセンシング部との間に磁気回路をなす励磁コイルと、励磁コイルを保持するコア本体とを有し、ロータのセンシング部に対してシャフトの軸線方向に対向配置される固定コアとを備え、センシング部の周方向360度あたりの幅の変化する周期を複数周期とし、固定コアが主信号用コイルコア組の固定コアと、これと独立してロータの回転角度を検出可能な参照信号用コイルコア組の固定コアからなり、主信号コイルコア組の固定コアと参照信号用コイルコア組の固定コアのセンシング部の周方向に設置される互いの相対角度差をセンシング部周期の整数倍となっている。
(もっと読む)
回転センサ
【課題】歯車のバックラッシ等の影響を極力受けず検出精度に優れた回転センサを提供する。
【解決手段】被測定用回転体50の回転角度をこの回転体以外の測定用回転体を用いて測定する回転センサで、被測定用回転体とほぼ同一の回転数で回転する第1の測定用回転体10と、この回転体と連動して回転し、回転数がこの回転体より小さい第2の測定用回転体20を備え、被測定用回転体と第1の測定用回転体が歯車で連結され、第1の測定用回転体と第2の測定用回転体が歯車で連結され、第2の測定用回転体は第1の測定用回転体の回転に伴って間欠的に回転し、各測定用回転体には、径方向磁界を有する永久磁石が中心に配置され、更に各磁石が発生する磁界の径方向の変化を検出可能な箇所に所定数の磁界検出素子が測定用回転体の回転と独立してそれぞれ配置されている。
(もっと読む)
舵角検出装置
【課題】全舵角範囲に亘る回転軸の回転角度を精度良く検出し、車両の舵角を簡素な構成にて精度良く検出可能な舵角検出装置を提供する。
【解決手段】ステアリングホイール30の操作に応じたステアリング軸3の回転を舵取機構1に伝え、舵取機構1の動作をタイロッド12を介して連結された操舵用の車輪14,14に伝えて、車輪14,14の向きを変えて舵取りされる車両の操舵角度を、ステアリング軸3の複数回転に亘る回転角度を求めることにより検出する舵角検出装置において、前輪14に対するタイロッド12の相対角変位を角変位センサ6により検出して、ステアリング軸3が中立位置から左右の何回転目の領域にあるかを判定する。判定された領域内でのステアリング軸3の回転角度を回転角センサにより求めて全舵角範囲内での操舵角度を算出する。以上により簡素な構成により全舵角範囲に亘って高精度の舵角検出が可能となる。
(もっと読む)
舵角検出装置
【課題】全舵角範囲に亘る回転軸の回転角度を精度良く検出し、車両の舵角を簡素な構成にて精度良く検出可能な舵角検出装置を提供する。
【解決手段】ステアリングホイール30の操作に応じたステアリング軸3の回転を操舵用の車輪12,12に伝え、該車輪12,12の向きを変えて舵取りされる車両の操舵角度を、ステアリング軸3の複数回転に亘る回転角度を求めることにより検出する舵角検出装置において、ステアリング軸3に係合され、ステアリング軸3の回転に応じて揺動する揺動アーム6の揺動角度を揺動角センサ7により検出し、検出された揺動角度によりステアリング軸3が中立位置から左右の何回転目の領域にあるかを判定する。判定された領域内でのステアリング軸3の回転角度を回転角センサにより求めて全舵角範囲内での操舵角度を算出する。以上により簡素な構成により全舵角範囲に亘って高精度の舵角検出が可能となる。
(もっと読む)
回転角度検出装置
【課題】回転体を回転させることなく速やかに角度センサの異常を検出可能な回転角度検出装置を提供する。
【解決手段】第1角度センサ2、第2角度センサ4に交互に電源の供給と遮断を行い、第1角度センサ2または第2角度センサ4から出力されて第1信号増幅器3または第2信号増幅器5によって増幅された信号Vo1または信号Vo2を、配線間にショート等の異常が無い状態における信号Vo1または信号Vo2と比較することによって、配線間にショート等の異常が無いかどうかを判断する。これにより演算部6は、第1角度センサ2または第2角度センサ4に電源を供給するだけで即座にショート等の異常を検出することができる。さらに車両のステアリングシャフトにつながるステアリングハンドルが操作される前に、回転角度検出装置1の異常を検出することができる。
(もっと読む)
舵角検出装置
【課題】全舵角範囲に亘る回転軸の回転角度を精度良く検出し、車両の舵角を簡素な構成にて精度良く検出可能な舵角検出装置を提供する。
【解決手段】ステアリングホイール30の操作に応じたステアリング軸3の回転を操舵用の車輪12,12に伝え、該車輪12,12の向きを変えて舵取りされる車両の操舵角度を、ステアリング軸3の複数回転に亘る回転角度を求めることにより検出する舵角検出装置において、ステアリング軸3に係合され、ステアリング軸3の回転に応じて移動する移動体6の移動位置を位置センサ7により検出し、この検出結果によりステアリング軸3が中立位置から左右の何回転目の領域にあるかを判定する。回転角センサにより判定された領域内でのステアリング軸3の回転角度を求めて全舵角範囲内での操舵角度を算出する。以上により簡素な構成により全舵角範囲に亘って高精度の舵角検出が可能となる。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、AMR素子の端子間の短絡を検出し、誤判定がなく確実な検出が可能なものを提供することを目的とする。
【解決手段】AMR素子7や8のグランド端子12B等を、抵抗18を介してグランドに接続すると共に、この抵抗18に並列に設けたスイッチング手段19を制御手段17に接続することによって、制御手段17がスイッチング手段19を切換え、AMR素子7や8からの出力信号によって回転体1の回転角度を検出すると共に、これらの出力信号の違いによって、AMR素子7や8の出力端子間の短絡を検出できるため、誤判定がなく確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
操舵角検出装置
【課題】簡素な構成にて全操舵角範囲に亘る操舵角を高精度に検出できる操舵角検出装置を提供する。
【解決手段】ラック軸1の軸長方向の一側から他側に向けて連続的に深さが変化する溝12がラック軸1に設けられ、サポートヨーク3に設けられた可動子41の一部を該溝12の底面に当接させ、ラック軸1の移動に応じて生じる可動子41の変位を検出して、車両の操舵角を算出する構成になっており、このように連続的に深さが変化する溝12を設けているため、ラック軸1の移動に応じて可動子41は当接部の深さに追随して変位することとなり、この変位により一義的にラック軸1の移動量を知ることができ、簡素な構成にて全操舵角範囲に亘る操舵角を高精度に検出できる。
(もっと読む)
回転角度・回転トルク検出装置
【課題】自動車のステアリングの回転角度や回転トルクの検出等に用いられる回転角度・回転トルク検出装置に関し、回転角度や回転トルクの確実な検出が可能なものを提供することを目的とする。
【解決手段】第一及び第二の回転角度検出手段5、6と第一及び第二の回転トルク検出手段13、14に制御手段9を接続すると共に、制御手段9がこれらの回転角度検出信号と回転トルク検出信号から、第一の回転体1の回転角度と第二の回転体11の回転トルクを検出することによって、制御手段9に入力されたデータに極端な差異がある場合には、いずれかが誤っていると判定しデータを出力しないことによって、誤ったデータが車両の電子回路16に出力されることを防ぎ、回転角度や回転トルクの確実な検出が可能な回転角度・回転トルク検出装置を得ることができる。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、AMR素子の端子間の短絡を検出し、誤判定がなく確実な検出が可能なものを提供することを目的とする。
【解決手段】AMR素子7や8の−出力端子11Cや+出力端子12Dを、整流素子18とスイッチング手段19を介して制御手段17に接続することによって、スイッチング手段19を切換えて、制御手段17がAMR素子7や8の出力信号から回転体1の回転角度を検出すると共に、増幅手段13からの出力電圧の違いによって、AMR素子7や8の隣り合った出力端子間の短絡を検出できるため、誤判定がなく確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
回転角検出装置
【課題】簡素な機構にて360度を超える回転角検出が可能な回転角検出装置を提供すること。
【解決手段】たとえば磁石4の回転回数変化に応じて磁石4を軸方向に変位させることにより、磁気検出部7に作用する磁束密度Bのベクトル長(大きさ)を磁石4の回転回数変化に応じて単調変化させる。この磁束密度Bのベクトル長の変化量から回転回数を算出し、同時に、2方向の磁束密度Bx、Byの演算により360度以下の回転角θを算出し、両者を加算して最終的な回転角θ’を算出する。
(もっと読む)
201 - 220 / 281
[ Back to top ]