
Fターム[2F063BA08]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の種類 (1,844) | ステアリングホイール、ハンドル (281)
Fターム[2F063BA08]に分類される特許
161 - 180 / 281
角度検出装置
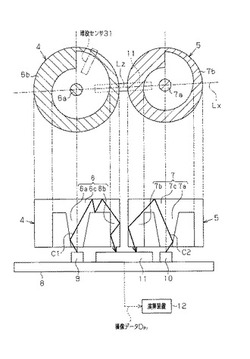
【課題】角度検出の際の角度分解能を高分解能にすることができる角度検出装置を提供する。
【解決手段】ステアリングホイール等に連結固定された主動ギアに連動回転する各従動ギア4,5をライトガイドとすべくこれらを透明樹脂で形成し、その外周肉厚部6b,7bを肉厚が直線的に変化するような形状とする。各従動ギア4,5の中心位置下部にLED9,10を各々配置し、これらの入射光を従動ギア4,5を介してリニアイメージセンサ11に導く。リニアイメージセンサ11は、光の照射幅を検知してこの照射幅に応じて変化する、即ちギア回転に伴って直線的に変化する撮像データDpiを演算装置12に出力する。演算装置12は、リニアイメージセンサ11から得た撮像データDpiを用いて各従動ギア4,5の回転角度を算出し、これらギア4,5の回転角度の組み合わせを見て主動ギアの回転角度を算出する。
(もっと読む)
人体接近検出装置

【課題】車両用ドアハンドルに水滴が付着した場合であっても誤動作が生じるのを防止することができ、安価に構成可能で複雑な前処理が不要な人体接近検出装置を提供する。
【解決手段】人体接近検出装置1は、車両用ドアハンドル3を構成するハウジング4内のドア2側の壁面4aと反対側の壁面4bの内側に設けられたセンサ電極11と、この壁面4bをドア2側の壁面4aに連結する壁面4c,4dの内側に設けられた参照電極12a,12bと、センサ電極11の静電容量を検知する検知回路21と、参照電極12a,12bの静電容量を検知する検知回路22と、検知回路21,22からの出力を平滑化するLPF23,24と、LPF24からの出力を係数倍する乗算器26と、LPF23および乗算器26からの出力を加算する加算器25と、加算器25からの出力を基準電圧と比較するコンパレータ27とを備える。
(もっと読む)
車両用複合センサ
【課題】車両に対する操舵角センサ及び加速度センサの配置スペースの削減と取付性の向上とを共に図りつつ、前記車両に取り付けた前記操舵角センサ及び前記加速度センサの配線作業の容易化と、取付費用の削減とを共に実現する車両用複合センサを提供する。
【解決手段】車両用複合センサ60では、ハンドル18の操舵角を検出する操舵角センサ64と、自動二輪車11のロール角を検出する加速度センサ62とが、共に同一のケース65内に収容されている。操舵角センサ64は、ケース65を自動二輪車11に取り付けた際に中心軸122と略同軸となるようにケース65内に配置され、加速度センサ62は、ケース65を自動二輪車11に取り付けた際に、略水平に配置されるようにキャスタ角だけ傾斜した状態でケース65内に配置される。
(もっと読む)
回転角度・回転トルク検出装置
【課題】自動車のステアリングの回転角度や回転トルクの検出等に用いられる回転角度・回転トルク検出装置に関し、確実な回転角度や回転トルクの検出が可能で、安価なものを提供することを目的とする。
【解決手段】第一及び第二の回転角度検出手段5、6と回転トルク検出手段13に制御手段19を接続すると共に、制御手段19がこれらの回転角度と回転トルク検出信号を比較することによって、補助検出体等の他の部品が不要となり、簡易な構成で安価な装置とすることができると共に、回転角度や回転トルクの誤ったデータが車両の電子回路に出力されることを防ぎ、回転角度や回転トルクの確実な検出が可能な回転角度・回転トルク検出装置を得ることができる。
(もっと読む)
生理データ抽出装置、スイッチ装置、および生理状態警報装置
【課題】 ハンドルの回転角度を電気的に検出するセンサを要することなく、機械的な安全制御手段を用いて安全性の確保を図り、運転者の有効な生体情報のみを出力できるスイッチ装置の提供。
【解決手段】 走行車の走行方向を制御するために運転者が操作するステアリングホイールと、該ステアリングホイール上に設けられ、運転者の掌と接触した状態で運転者の生理データを検出するためのバイタルセンサを備え、該バイタルセンサからの検出出力に基づいて運転者の生理データを抽出する生理データ抽出装置において、該ステアリングホイールの回転に連動して移動する移動部材と、該移動部材が所定距離以上に移動した場合に、該移動部材の移動によってスイッチを機械的に開くスイッチ手段とを備え、該スイッチ手段によってスイッチが開いた状態になったときに、上記バイタルセンサからの検出出力を生理データとして抽出しないことを特徴とする生理データ抽出装置。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、小型化が図れ、回転角度の確実な検出が可能なものを提供することを目的とする。
【解決手段】第一の検出体12の上方を回転体1に、下方を第二の検出体13に噛合させると共に、第二の検出体13を回転体1の下方に配置することによって、全体の小型化が図れると共に、第一の検出体12や第二の検出体13の外径や歯数を増し、回転角度の検出精度を高めることも容易に行える、確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
回転角検出装置
【課題】回転軸の回転角を複数回転に亘って精度良く検出することができる回転角検出装置を提供する。
【解決手段】ステアリング軸3の回転角を複数回転に亘って検出する回転角検出装置において、ステアリング軸3の回転を遊星歯車減速機7によりキャリア73に減速伝達し、レゾルバ45によりステアリング軸3の回転に応じて周期的に変化する信号を出力し、レゾルバ6によりキャリア73の回転に応じて周期的に変化する信号を出力するように構成してある。この結果、遊星歯車減速機7の減速比を適宜選定することにより、レゾルバ45,6の出力信号に基づいて、ステアリング軸3の回転角を複数回転に亘って算出することができ、全舵角範囲に亘る舵角を求めることができる。
(もっと読む)
回転角度検出装置
【課題】ステアリングシャフトの軸方向の厚みを薄くした回転角度検出装置を提供する。
【解決手段】ステアリングシャフトと一体に回転するロータ5の回転を減速する減速機構を、第1平歯車6、第2平歯車7によって構成したので、平歯車は軸方向に比較的薄く形成しやすく、減速機構としてウォームギア等を用いた場合と比較して、回転角度検出装置の薄型化を図ることができる。また第1平歯車6と第2平歯車7との間で、小径歯車6A、7Aと大径歯車6B、7Bの軸方向位置が交互となるように、第1平歯車6および第2平歯車7を配置することにより、回転力の伝達経路が軸方向に広がることがなく、ロータ5の軸方向の厚みの薄い回転角度検出装置1を形成することができる。
(もっと読む)
舵角検出装置
【課題】ステアリング軸の回転角度の積算による舵角の検出を、絶対舵角が不明である場合においても遅滞なく行わせることができ、また操舵感を損なうことのない舵角検出装置を提供する。
【解決手段】ステアリング軸3に周設された大歯車63と、この大歯車63と噛合する位置と、この大歯車63との噛合を解除する位置との2位置の間にて移動可能な小歯車 62a,62bとを備え、通常の走行時には、小歯車 62a,62bを噛合解除位置に移動させ、MRセンサ67により検出される大歯車63の回転角度を積算して舵角を算出し、停車時には、小歯車 62a,62bを噛合位置に移動させておき、走行開始時には、小歯車 62a,62bの回転位置の組み合わせの変化から絶対舵角の始点を定め、この始点から大歯車63の回転角度の積算を開始して舵角を算出する構成とする。
(もっと読む)
回転角度検出装置
【課題】ギア間のガタつきが少なく検出精度の高い回転角度検出装置を提供する。
【解決手段】ステアリングシャフトと一体に回転するロータ歯車3の回転を遊星歯車機構によって構成された減速機構5によって減速し、該減速後の回転を減速側検出用ギア6に伝達するものとしたので、回転の伝達効率がよく、また減速機構5を構成する各ギアの軸が同一方向であるため、ステアリングシャフトの回転を少ないガタによって減速側検出用ギア6に伝達することができる。したがって、減速機構5でのガタつきが少ないのでステアリングシャフトの回転角をより正確に検出することができる。
(もっと読む)
舵角検出装置
【課題】ステアリング軸の回転角度の検出値の積算による舵角の検出を、積算のための始点が不明となる状況下においても遅滞なく行わせることができるようにする。
【解決手段】ステアリング軸3に周設された主動歯車61に、外周縁から突出するように押圧片66を設け、主動歯車61に並設した従動円板63に、複数の押圧ピン65,65…と、夫々の押圧ピン65,65…の両側の部分歯部64,64…とを設け、主動歯車61が1回転する毎に押圧片66が押圧ピン65を押して従動円板63を回転させ、部分歯部64が主動歯車61に噛合して従動円板63が定量回転するように構成し、この従動円板63の回転位置から得られる絶対舵角をステアリング軸3の回転角度の積算のための始点として用いる。
(もっと読む)
回転角検出装置
【課題】本発明は、組み付け性や整備性が良好な回転角検出装置の提供を目的とする。
【解決手段】回転体150の回転角を検出する回転角検出装置800であって、径方向に2分割される本体を有する回転角センサ100(200,300等)を備えることを特徴とする。回転角センサは、回転体と共に回転するロータ104と、ステータ106と、コイル(励磁コイル及び検知コイル)108とを備え、回転角検出装置は、ロータの回転に伴って周期的に変化する磁束抵抗を利用して回転体の回転角を検出する。
(もっと読む)
舵角センサ
【課題】 より高精度の舵角センサを提供する。
【解決手段】 ステアリングシャフト103に取り付け、当該ステアリングシャフトの絶対角度を測定するための舵角センサ1であって、当該ステアリングシャフトと連動して可逆回転する主動ギア7と、主動ギアと連動して回転する微信号用ギア19の回転角度を検出する第1検出手段と、主動ギアと連動して回転する粗信号用ギア45gの回転角度を検出する第2検出手段と、を備え、当該第1検出手段は、検出した当該微信号用ギアの回転角度を示す微信号を出力するホール素子及び磁石を含めて構成してあり、当該第2検出手段は、検出した当該粗信号用ギアの回転角度を示す粗信号を出力するポテンショメータを含めて構成してある。そのため、なるべく少ない部品点数で、隣接する検出手段相互の磁束の影響を受けない、より高精度の舵角センサを提供することができる。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、簡易な構成で、安価なものを提供することを目的とする。
【解決手段】第一及び第二の検出体22と23を回転体21に対し直交方向に配置すると共に、第一の検出体22側面外周の平歯車部22Aを回転体21下面外周の歯車部21Aに噛合させることによって、第一の検出体22を簡易な構成とすることができると共に、一つの配線基板24に磁気検出素子5B、6Bや制御手段8を形成できるため、安価で回転角度の確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
回転角度検出装置
【課題】装置を大型化することなく広い検出角度範囲を実現できる回転角度検出装置を提供すること。
【解決手段】被検出回転体に固定し共に回転する主回転体と、主回転体に対し所定の回転比で回転する副回転体と、nを2以上の整数として、主回転体の回転に応じ周期的に変化する連続信号を周期数nで出力する主回転検出機構と、mをnより小さく1以上の整数として、副回転体の回転に応じ周期的に変化する連続信号を周期数mで出力する副回転検出機構と、主及び副回転検出機構の出力信号を用い主及び副回転体回転角度を算出する信号処理手段と、主又は副回転体回転角度、主回転体と副回転体との相対回転角度、主及び副回転検出機構出力信号周期に基づいて被検出回転体回転角度を算出する演算処理手段とを備える。
(もっと読む)
操向角感知装置及び感知方法
【課題】本発明は、操向角感知装置及び感知方法を提供するためのものである。
【解決手段】本発明は、操向シャフトと共にシャフトギアが回転し、互いに異なるギア比を有する複数個のサブギアがシャフトギアと共に回転し、各サブギアの軸上に結合された複数個のマグネットの回転角度に相応する回転ビット値の差を利用して操向シャフトの操向角を検出する装置及び方法を提供する。
(もっと読む)
舵角センサ
【課題】 より高精度の舵角センサを提供する。
【解決手段】 ステアリングシャフト105に取り付け、当該ステアリングシャフト105の絶対角度を測定するための舵角センサであって、所定回転数回転するステアリングシャフトの回転角度を測定して粗信号を出力する粗信号測定機構45及び微信号を出力する微信号測定機構15と、粗信号測定データ及び微信号測定データに基づいて当該ステアリングシャフト105の絶対角度を演算する演算機構37と、を備え、当該演算機構37は、当該測定データのうち、所定範囲を逸脱した異常データを検出・排除する異常データ検出・排除部と、を含めて構成してある。そのため、主動ギア(ステアリングシャフト)の回転角度の検知をより精度の高いものとする。これにより、舵角センサの高精度化が実現する。
(もっと読む)
電動パワーステアリング用モータ及びレゾルバ装置
【課題】防水構造であっても、レゾルバ装置の周方向位置を容易に調整できる電動パワーステアリング用モータの提供を課題とする。
【解決手段】上記課題は、モータ100の筐体を封止してレゾルバ装置200の防水を図るシール部材241が、モータ100の筐体を構成する部材によりモータ100の軸方向から挟み込みまれて圧縮されるようにすることにより解決できる。
(もっと読む)
ステアリング角度センサ
ステアリング角度及びトルクセンサ、並びに他のタイプの回転又は線形位置センサを含むセンサを提供する。ステアリングコラムのようなシャフトの角度位置を判断するための装置は、コイルアセンブリ、コイル支持体、及びシャフトの角度位置と相関性があるカプラ角度位置を有するカプラ要素を含む。コイルアセンブリは、送信機コイル及び少なくとも1つの受信機コイルを含み、カプラ要素は、送信機コイルと少なくとも1つの受信機コイルとの間の誘導結合を変更する。信号処理回路は、コイルアセンブリからコイル信号を受け取り、受信機信号と、軸線方向変位と相関性があるが、それ以外は実質的に角度位置と無関係である基準信号とを用いて角度位置を判断する。基準信号をレシオメトリック感知に用いて、実質的に共通モード因子を排除し、かつシャフトの回転数を判断することもできる。複合角度及びトルクセンサは、トーションバーにわたるより角度を更に判断する。 (もっと読む)
操舵角検出装置
【課題】 イグニッションスイッチが抜かれたときに操舵軸の絶対舵角や中立位置を記憶する必要がない操舵角検出装置を提供する。
【解決手段】 操舵ハンドルを左操舵限界位置−θmaxから右操舵限界位置+θmaxにまで操舵したときにn回の周期波形信号を出力する第1レゾルバセンサと、(n+1)回の周期波形信号を出力する第2レゾルバセンサと、(n+2)回の周期波形信号を出力する第3レゾルバセンサとを備え、第3レゾルバセンサで得られる相対角θcと第2レゾルバセンサで得られる相対角θbの相対角差θcbと、第3レゾルバセンサで得られる相対角θcと第1レゾルバセンサで得られる相対角θaの相対角差θcaとに基づいて絶対舵角θと中立位置とを算出する。
(もっと読む)
161 - 180 / 281
[ Back to top ]