
Fターム[2F063BA22]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の種類 (1,844) | ロボット、マニピュレータ (33)
Fターム[2F063BA22]に分類される特許
21 - 33 / 33
圧力分布情報検出装置及び圧力分布情報検出方法
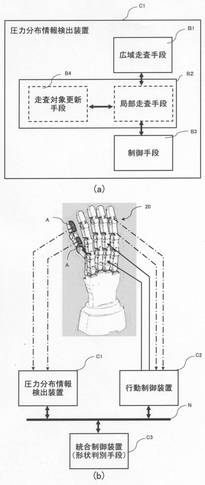
【課題】センサユニットを高密度に配置した触覚センサであっても、短時間に正確な圧力分布情報を計測することができる圧力分布情報検出装置及び圧力分布情報検出方法を提供する。
【解決手段】対象物からの加圧により電気特性値が変化する複数のセンサユニット6がマトリックス状に配列された触覚センサAに対して、予め設定された所定のセンサユニット6に対して配列順に走査して各電気特性値を検出する広域走査手段B1と、前記広域走査手段B1により検出された何れかのセンサユニット6の電気特性値が所定の閾値以上となるときに、当該センサユニット6を中心として、当該センサユニット6及びその周囲のセンサユニット6に対してのみ走査して各電気特性値を検出する局部走査手段B2を備えて構成される。
(もっと読む)
回転検出装置

【課題】 ステアリング軸などの回転体の回転角度を検出する回転検出装置を小型に構成して狭いスペース内に配置できるようにする。
【解決手段】 ステアリング出力部14にはパワーアシストのためのウオームホイール15が固定されており、このウオームホイール15に形成された平面歯車15bによって検出ユニット20の入力歯車22aが増速されて回転させられる。検出ユニット20内には、検出軸22の回転を減速する減速機構が設けられ、この減速によりケース内に設けられた検出回転部材が、前記ステアリング出力部14の回転と1:1の角度で回転し、その回転角度が検出素子で検出される。
(もっと読む)
リニアスケール、リニアエンコーダ装置、リニアモータおよび単軸ロボット
【課題】長さの大きいリニアスケールを作製する場合にも、その製造プロセスが煩雑になるのを抑制することが可能なリニアスケールを提供する。
【解決手段】このリニアスケール11は、所定の方向へ延びるように形成されるとともに、所定の方向に沿ってN極領域11bとS極領域11cとが交互に並ぶように設けられた2つのスケール部11aが長さ方向に接続されたものであって、一方のスケール部11aのS極領域11cがその最も磁束密度が高い位置において切断されることにより形成される端部11dと、他方のスケール部11aのS極領域11cがその最も磁束密度が高い位置において切断されることにより形成される端部11eとが接合されている。
(もっと読む)
回転角度検出装置
【課題】関節付き機械における関節部分や旋回軸付き機械における旋回軸の回転角度の検出に適用されて、小型・高分解能で、絶対角度の検出が可能であり、環境変化にも強く、組立性・組込性を向上させることができる回転角度検出装置を提供する。
【解決手段】 関節部分を有する建設機械または産業機械等の関節付き機械において、前記関節部分の回転角度を検出する回転角度検出装置である。前記関節部分を構成する互いに回転自在な一対の関節構成部材のうちの片方の関節構成部材に回転中心回りの円周方向異方性を有する磁気発生手段28を設ける。この磁気発生手段28の回転中心の軸方向に対向してもう片方の関節構成部材に、前記磁気発生手段28の磁気を検出する磁気アレイセンサ29を設ける。この磁気アレイセンサ29の出力から磁気発生手段28の回転角度を算出する角度算出手段30を設ける。
(もっと読む)
スポット溶接ロボットの電極チップ整形監視方法及び同監視装置
【課題】 電極チップ整形監視装置を簡素化でき、ロボットのティーチングが不要で、且つサイクルタイムに影響を与えないようにする。
【解決手段】 スポット溶接ロボットに設けた各軸回りに電極チップを回動させるためのサーボモータ24における回転軸の回転位置、回転軸の回転速度及びモータ電流をそれぞれフィードバック制御するサーボモータ制御部70Aのフィードバック量(即ち、検出電流If、位置情報Pf、速度情報Vfのうちの少なくとも一つ)と、このフィードバック量に対応させて予め設定した設定値幅とを比較することにより、電極チップの整形状態及びチップドレッサの作動状態を監視する。
(もっと読む)
フレキシブルセンサチューブ
【課題】
瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】
瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
センサ素子、センサ装置、対象物移動制御装置、対象物判別装置
【課題】3次元的に働きかける外力を好適に検知可能なセンサ素子を提供する。
【解決手段】対象物OBから受ける外力Fにより圧縮又は伸張可能な弾性部材Eと、前記外力Fを受け変形した際に電気抵抗値が増減する抵抗素子Rと、前記弾性部材Eの内部乃至その表面に配置されるとともに所定位置にある前記抵抗素子Rを支持し得る支持部材C4とを具備するようにした。
(もっと読む)
立体形状記録装置
【課題】移動物体に対しても適用可能であり、精度の高い立体形状を簡易かつ迅速に測定することができること。
【解決手段】三角形の各辺上に配置され、機械的変位量を電気的変位量に変換する摺動抵抗器118〜120と、各摺動抵抗器118〜120が検出した電気的変位量を取得し、記録する制御装置とを備え、摺動抵抗器を有した三角形をメッシュ状に隣接配置した布状の変位部とすることによって、自由立体形状を測定する。
(もっと読む)
接触角検出型触覚センサ及びこれを用いた制御方法
【課題】対象物からの力がいずれの方向より作用したものかを検出することが可能な接触角検出型触覚センサを提供する。
【解決手段】接触角検出型触覚センサ10が矢印方向Aに移動して対象物Jに接近すると、回転体11の触覚センサ13の縁が対象物Jに接触する。そして、接触角検出型触覚センサ10の矢印方向Aへの移動が継続されると、対象物Jと接触している回転体11の触覚センサ13の縁に力が作用し、回転体11の回転中心周りにモーメントが発生して、回転体11が矢印方向Bに回転し、触覚センサ13の感圧センサ16全体が対象物Jに接触して、回転体11の回転が停止する。この結果、触覚センサ13の感圧センサ16が対象物Jに安定的に接触し、触覚センサ13の検出面に対する法線方向と対象物Jの表面に対する法線方向が一致する。このとき、回転角度検出回路26は、回転体11の回転方向及び回転角度を検出する。
(もっと読む)
ロボットハンド
【課題】関節周辺のワイヤーやギヤ等の他の部材と干渉したり、関節の回転の繰り返しに伴う金属疲労により断線することがなく、また大型化を招かずに、複数の信号経路を関節経由で形成することが可能なロボットハンドを提供する。
【解決手段】指先部4の感圧センサの信号線37を関節7のポテンショメータ23で中継接続し、この信号線37を手の平のフレーム側へと導いている。このため、関節7周りの指先部4の回転に際し、信号線37が関節7周辺のワイヤーやプーリに干渉することはなく、また信号線37が屈曲することもなく、金属疲労による信号線37の断線が生じる虞もない。
(もっと読む)
外形追跡装置
外形追跡装置は、ウォータージェット・ノズルの周囲に間隔をあけて配置された複数のセンサを含み、前記センサ各々は、作業面と前記ノズルの長手方向軸に垂直な第1の平面との間の距離を測定するように構成されている。前記センサは、前記第1の平面にあるホール効果センサおよび前記作業面に平行な第2の平面にある磁石を含んでもよい。検知回路は、前記センサからの信号を処理して、前記第1の平面に対する前記作業面の角度、および前記ノズルの開口部と前記作業面との間の距離を決定する。衝突検知センサは、前記装置が前記作業面の平面上で障害物の所定の距離の範囲内に接近すると、信号を供給する。シールド・プレートは、前記作業面の上方に低角で発生する切断流体の第2のしぶきを阻止し、かつ減衰させる。  (もっと読む)
(もっと読む)
測長機能付きナノグリッパ装置
【課題】 試料の把持することができるとともに、試料を把持することによりその寸法を計測することができる測長機能付きナノグリッパ装置の提供。
【解決手段】 駆動部6には各アーム3を駆動するめの固定電極および可動電極が設けられている。固定電極60aおよび可動電極61aは左側のアーム3を駆動するものであり、可動電極61aは支持部62により台座7に弾性支持されている。同様にアーム3も支持部63により台座7に弾性支持されている。電極60a,61a間に電圧を印加すると、クーロン力により可動電極61aが右側に移動しアーム3を閉駆動する。アーム3が試料を把持した際の電極60a,61a間の静電容量および電極60b,61b間の静電容量と、記憶回路93に記憶されたアーム3の間隔と静電容量との相関とに基づいて、試料の寸法を測定することができる。
(もっと読む)
姿勢並びに関節角度検出装置及び方法
【課題】 地磁気や外部磁界の影響を受けないで発信出力を受信することができる。
【解決手段】 基準部位に取付けられ交番電流により交番磁束を発生させる送信コイル3と、動作部位に取付けられ上記交番磁束を検知する受信コイル4と、上記交番電流を発生させる発振器1の発振波形と上記交番磁束を検知する受信コイル4の受信波形との同期検波を行う同期検波回路6とを有する。また、送信コイル3に対し異なる動作部位に複数の受信コイル4を備え、この複数の受信コイル4を切り替えるマルチプレクサ10を備える。
(もっと読む)
21 - 33 / 33
[ Back to top ]