
Fターム[2F063LA01]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | 位相差検出 (80)
Fターム[2F063LA01]に分類される特許
61 - 80 / 80
直線位置検出装置

【課題】小型かつシンプルな構造を持つ直線位置検出装置の提供。
【解決手段】コイル部と磁気応答部材とを具え、検出対象の変位に応じて前記コイル部と前記磁気応答部材の一方が他方に対して非接触的に相対的に直線変位し、これに応じた出力信号を前記コイル部より得ることにより該検出対象の変位を検出する。前記コイル部は、所定の交流信号によって定電圧駆動されるコイルを含み、該コイルへの磁気応答部材の侵入量に応じて生じるインダクタンス変化に基づく電流変化を計測し、これに基づき前記コイル部に対する前記磁気応答部材の相対的直線位置検出データを得る。
(もっと読む)
移動距離計測装置および移動距離計測方法

【課題】 移動体の構造物に対する相対移動距離を、簡易に高い信頼性で測定する。
【解決手段】 移動体31の導電性の構造物2に対する相対移動距離を測定する移動距離計測装置において、移動体31と一体となって移動し、交流電圧が負荷される移動検出用励磁コイル3と、移動検出用励磁コイル3に対して移動体31の移動方向の前方および後方に配置された、移動体31と一体となって移動する少なくとも2つの検出コイル4a,4bと、検出コイル4a,4bに発生した励起電圧の振幅比および位相差に基づいて、移動体31の構造物2に対する相対移動距離を算出し、移動検出用励磁コイル3に負荷された電圧に対する励起電圧の振幅比に基づいて、移動体31と構造物2との距離を求め、相対移動距離を補正する移動距離演算手段を有する。
(もっと読む)
シリンダ位置検出装置
【課題】小型かつシンプルな構造を持つシリンダ位置検出装置の提供。
【解決手段】検出部は、コイル部及びこのコイル部に対して相対的に変位可能に非接触的に配置される磁気応答部材を含み、該磁気応答部材の該コイル部に対する相対的位置に応じた検出信号を前記コイル部から出力する。前記シリンダ本体とピストン部の一方に該コイル部が配設され、他方に該磁気応答部材が配設されてなる。コイル部は、所定の交流信号によって定電圧駆動されるコイルを含み、該コイルへの磁気応答部材の侵入量に応じて生じるインダクタンス変化に基づく電流変化を計測し、これに基づき前記ピストン部の位置検出データを得る。
(もっと読む)
位相検出回路及びこれを用いたレゾルバ/デジタル変換器並びに制御システム
【課題】小型かつ低コストで、耐ノイズ性を向上させた位相検出回路を提供する。
【解決手段】本発明の位相検出回路は、入力信号と参照信号546とを乗算して第1信号を出力する乗算器510と、第1信号を積分して第2信号を出力する積分回路520と、第2信号に基づいて位相情報を推定する位相推定回路530と、位相情報に基づいて参照信号546を生成する参照信号生成回路540とを備える。波形全体の情報に基づいて位相を求めるため、局所的なノイズの影響を希釈し、耐ノイズ性を向上させることができる。
(もっと読む)
移動体システム
【構成】 レール側に永久磁石48〜50を走行方向に配列した被検出プレート14を設ける。天井走行車側には、コイル54を走行方向に配列すると共に、被検出プレート14を検出するための光センサ51〜53を備えたリニアセンサ12を設け、被検出プレート14と上下方向に対向させる。光センサ51〜53でカーブ区間と直線区間を識別し、リニアセンサの有効範囲を変更する。
【効果】 給電線からのノイズの影響が小さく、かつカーブ区間でも位置を認識できる。
(もっと読む)
埋設電流搬送導体が所定の最小深さの上に埋設されているか否かを判定するための方法および装置
電流搬送導体を検出するための検出器(1)は、専用の信号送信機によって導体に誘導される主電源または電磁信号の一方または双方の結果として電流搬送導体によって生成される電磁放射を検出するために、垂直の間隔を置いた一対のアンテナ(3,5)を具備する。検出器(1)は、埋設導体の深さを継続的に計算し、埋設導体が所定の最小深さの上にある場合は、聴覚および/または視覚アラームをトリガする。アンテナ(3,5)の感度を低下させることによって、アラームが鳴る横方向へのオフセット範囲が縮小され、埋設導体の位置を判定することができる。 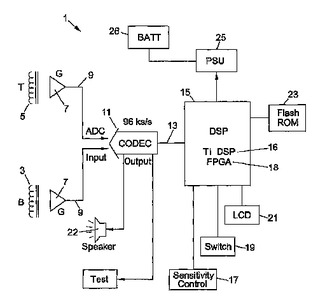 (もっと読む)
(もっと読む)
アブソリュートロータリエンコーダ及びマイクロメータ
【課題】小型化しても高精度測定が可能なアブソリュートロータリエンコーダを提供する。
【解決手段】ロータ3には、トラック41、43が同心円状に配置されている。トラック41は外側に配置され、受信巻線17及び送信巻線群G2と磁束結合可能にされている。これに対して、トラック43は内側に配置され、受信巻線19及び送信巻線群G2と磁束結合可能にされている。トラック41、43は、それぞれ、軸9を中心とする連続した一つのリング状の磁束結合巻線51、53である。磁束結合巻線51、53を構成するブロック61の数は、トラック41が10個で、トラック43が9個である。
(もっと読む)
シーケンシャルフローステートマシーンを有する近接検出器
近接検出器は、磁界感知要素によって供給される磁界信号に関連する状態を識別するシーケンシャルフローステートマシーンを有する。近接検出器は、状態に応答して振動を識別する振動プロセッサを含むことができる。 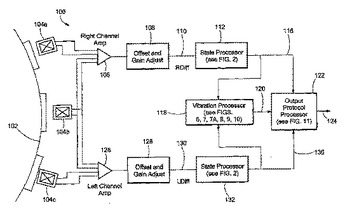 (もっと読む)
(もっと読む)
転がり軸受ユニットの変位測定装置及び転がり軸受ユニットの荷重測定装置
【課題】外部磁界等の外乱によりセンサ12a、12bの出力信号のデューティ比が変動した場合でも、外輪3とハブ4との相対変位量、延てはこれら外輪3とハブ4との間に加わる荷重を正確に求められる構造を実現する。
【解決手段】エンコーダ13に設け、上記両センサ12a、12bの検出部を対向させた、第一、第二の被検出部の特性変化の位相は、上記ハブ4の軸方向に変化している。演算器は、上記両センサ12a、12bの出力信号が立ち上がる瞬間同士の間の位相差と、これら両センサ12a、12bの出力信号が降下する瞬間同士の間の位相差との両方の位相差に基づいて、上記外輪3と上記ハブ4との相対変位量を算出する。これら両方の位相差に就いて、N=2の移動平均を施す事により、上記デューティ比の変動による影響をなくし、上記課題を解決する。
(もっと読む)
絶対回転角度検出装置
【課題】回転軸に連結し外周面に交互に極性の異なる磁極を着磁させたターゲットを用いて、高精度・高分解能に多回転の絶対回転角度の検出を行う装置を提供することを目的とする。
【解決手段】入力軸2と連結し外周面に等間隔をなして交互に極性の異なる磁極が着磁してあるターゲット3を保持し多回転可能な歯車を持つ第1の回転体1と、この第1の回転体1の歯車に接続され第1の回転体1より低速に回転し、中心部に磁石9が配置された第2の回転体8と、これらの回転角度を検出する第1、第2の検出手段11、10からなる簡単な構成で、高精度・高分解能に絶対回転角度の検出を行うものである。
(もっと読む)
内部欠陥測定方法および装置
【課題】構造体の内部欠陥の大きさと深さを定量的かつ高精度に測定・評価できる欠陥の大きさと深さ評価方法および装置を提供することにある。
【解決手段】腐食減肉部の検出および残肉厚を算出する処理手順は、(1)検出データの収集(S10)強磁性体でつくられた構造体の外面を走査させることによって、磁束検出コイルにて検出データの収集を行う(2)位相検波処理(S20)基準となる信号を乗算した後、フィルタリング処理を行う(3)座標変換(S30)先に求めたベクトル座標の座標変換すなわち座標軸の回転を行う(4)減肉部の検出(S40)(5)欠陥径の推定(S50)各ch間の減衰の仕方(傾き)から欠陥径の推定を行う(6)残肉厚の算出(S60)の順に行う。
(もっと読む)
変位測定装置付玉軸受ユニット及び荷重測定装置付玉軸受ユニット
【課題】アキシアル荷重の変動に基づく外輪3とハブ4aとのアキシアル方向に関する変位を大きくできて、この荷重の測定精度を十分に確保できる玉軸受ユニットを実現する。【解決手段】上記ハブ4aに、被検出面の特性変化のピッチが、軸方向に関して漸次変化するエンコーダ12を外嵌固定する。このエンコーダ12に対向させたセンサ13の検出信号のデューティ比の変化により、上記外輪3とハブ4aとのアキシアル方向に関する変位を検出する。そして、この変位により、これら外輪3とハブ4aとの間に加わるアキシアル荷重を求める。各玉5、5の直径dとピッチ円直径Dとの比d/Dを0.12〜0.4の範囲に規制し、荷重変動に伴う上記デューティ比の変動を大きくする事で、上記課題を解決する。 (もっと読む)
不平衝容量の検出装置、及びセンサの不平衝容量の検出方法、並びにこれらに用いる変換器
【課題】 歪ゲージナ等のセンサと測定装置本体をつなぐケーブルの変形振動により発生する容量変動分を計測時に取り除くセンサ不平衝容量の検出装置及びセンサの不平衝容量検出方法、並びにこれらに用いるセンサを得る。
【解決手段】 センサ1にケーブル4A〜4Dを接続して、歪量等の計測時にセンサの容量バランスが崩れた時の大きさに比例した容量分検出電圧Ecを発生させ、この容量分検出電圧Ecとブリッジ構成のセンサ1に供給する搬送波電圧BVを乗算器16等で演算して、容量バランスの崩れに比例した補正電圧を発生させ、センサ1やケーブル4A〜4Dの不平衝容量を相殺させる。
(もっと読む)
差動トランスの信号処理装置
【課題】ローパスフィルタによる動作遅れを防いで、応答速度の速い出力信号を得る。
【解決手段】差動トランスから応答速度の速い測定信号を得るための差動トランスの信号処理装置であって、差動トランスの出力信号をデジタル化する第1の高速アナログ−デジタル変換器60と、差動トランスの駆動信号をデジタル化する第2の高速アナログ−デジタル変換器64と、前記駆動信号により差動トランス出力信号を同期検波するデジタル信号処理手段(66)とを備える。
(もっと読む)
静電容量センサ
【課題】振器の発振周波数自体を変化させることなく、発振器を利用して対象物との間の静電容量を検出する静電容量センサを提供する。
【解決手段】対象物Xとの間の静電容量を検出する静電容量センサであって、一つ以上の発振器を有して、少なくとも二つ以上の経路S0、S2で同一の発振周波数を出力するように構成された発振手段2と、対象物Xとの間の静電容量を検出する容量電極1と、発振周波数と静電容量とにより定まる位相量に応じて、少なくとも発振手段2の一つの経路からの出力S0の位相を変更する移相手段3と、この移相手段3の出力と発振手段2の他の経路からの出力S2との位相差を検出する位相差検出手段4と、位相差より静電容量を判定する判定手段5と、を備える。
(もっと読む)
回転センサ
【課題】 回転センサのロータセンシング部と励磁コイル間のずれに基づく異常を検知する。
【解決手段】 シャフトSに取り付けられ、周方向に幅が変化するセンシング部12を有するロータ10と、センシング部とで磁気回路をなす励磁コイルと、励磁コイルを保持する磁性材のコア本体31a,32aとを有し、固定部材に取り付けてセンシング部に対してシャフト軸線方向に対向配置される固定コアとを備え、固定コアがセンシング部周方向に所定間隔で対向配置され、かつその励磁コイルが位相シフト部110を形成し、当該シフト部は発振部100と位相シフト量検出部120に接続され、一方の励磁コイルに接続された位相シフト量検出部の位相シフト量の振幅に上下限の少なくとも一方を設けてこれを一定値で飽和させ、この値と比較した際の他方の励磁コイルの位相シフト量検出部の位相シフト量の値に基づいて異常検知する。
(もっと読む)
誘導性センサ
対象物たとえば人間の指の温度または存在などの外部パラメータを検知するセンサは、(i)励起コイル(68、70)と、(ii)励起信号を生成するように動作することができ、生成された励起信号を励起コイルに加えるように構成される信号発生器(41、61、62、63)と、(iii)信号発生器により励起信号が励起コイルに加えられるのに応答して、電気信号がセンサ・コイルに生成されるように、通常受動共振回路の形で中間装置またはターゲット(74)を介して励起コイルに電磁的に結合することができるセンサ・コイル(74)と、(iv)センサ・コイル内で生成される周期的な電気信号を処理して、検知されるパラメータを表す値を決定する信号プロセッサとを備える。たとえば、PTC抵抗またはNTC抵抗、あるいは対象物が近接することによって影響を受けるコンデンサを備えることにより、中間装置は、検知すべきパラメータに敏感であり、その結果、センサ・コイル内で生成される周期的な電気信号は、パラメータの影響を受ける。やはり、センサは、たとえば中間装置における追加の共振回路によって、実質上励起信号と同じ周波数で更なる信号を生成することができ、信号プロセッサは、センサ・コイル内で生成される周期的な信号、および更なる信号から外部パラメータの値を決定する。たとえば、センサは、オペレータがいつ接触するかを検出するために、接触作動式の構成部品のアレイにおいて使用することができる。  (もっと読む)
(もっと読む)
変位センサ
【課題】変位センサにおいてコイルを含む検出部の温度依存性を簡単な構成と低いコストで的確に補償し、温度変動に対して安定で信頼性の高い変位センサを提供する。
【解決手段】検出対象の変位に応じて磁気応答物質との相対位置が変化するように配置されたコイルを含む検出部と、
前記検出部に所定周波数の交流信号を供給する発振回路と、
前記検出部に接続される外付回路と、
前記検出部及び前記外付回路のインピーダンスの位相変動量に基づき前記変位を検出する変位検出手段と、
を備え、前記変位による位相変動量が温度変化による位相変動量に比べて大きくなるように前記外付回路のパラメータが設定されていることを特徴とする変位センサ。
(もっと読む)
掘進管先端位置姿勢計測方法及び掘進管先端位置姿勢計測装置
【課題】地磁気が乱れていても、掘進管先端部の水平位置、深さ、傾斜角、回転角、及び方位角を精度よく測定する。
【解決手段】一辺が掘進計画線13と重なるように敷設された電流路22に交流電流を供給する電源21が接続されている。掘進管10先端部に3軸磁界検出器11及び3軸重力方向検出器12が設置されている。重力方向から掘進管先端部の傾斜角及び回転角を求める傾斜角・回転角検出部が設けられている。磁界の交流成分と電源からの同期信号から掘進管先端部の方位角を求める方位角検出部33が設けられている。磁界の交流成分から掘進管先端部の水平位置及び深さを求める水平位置・深さ計測部35が設けられている。
(もっと読む)
透明膜の段差の測定方法及び位相シフトマスクの作成方法
【課題】透明膜の段差の測定方法に関し、非接触、非破壊で且つ簡単な操作で高速、高精度に位相シフターの段差を測定すること。
【解決手段】第1の透明膜1の一部に形成された複数の第1の溝Sa1 ,…,San の段差量t1 ,….tn と該第1の溝Sa1 ,…,San からの反射光の偏光状態を示すパラメータの値との相関関係f1 を求めてデータベース化した後に、第2の透明膜42の一部に形成された第2の溝45の反射光の偏光状態を示すパラメータの第1の値を計測して、該第1の値と前記データベースの前記相関関係に基づいて該第2の溝45の第1の段差量を求める工程を含む。
(もっと読む)
61 - 80 / 80
[ Back to top ]