
Fターム[2F065CC11]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 車両;自動車 (618)
Fターム[2F065CC11]に分類される特許
601 - 618 / 618
計測システムおよび計測方法
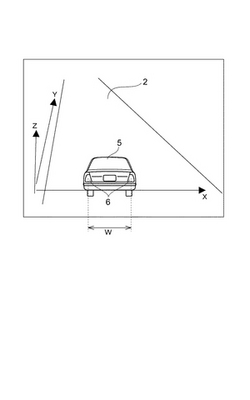
【課題】 撮影手段の撮影条件に関するパラメータを、より容易に算出させる。
【解決手段】 計測領域内の道路上を直線的に移動ながら通過する試験車両5を、計測領域を撮影するカメラで撮影し、その試験車両5の撮影画像に基づいて、カメラの撮影条件に関するパラメータを算出するとともに、算出したパラメータを用いて車両の速度などを計測する。計測領域内の道路上を直線的に移動ながら通過する試験車両5の撮影画像を用いてパラメータを算出することができるため、予め道路上に基準物を設置する等の困難を要する作業を省くことができる。
(もっと読む)
移動作業機の位置検出装置

【課題】 多種の作業に対応できる移動作業機の位置検出装置を提供する。
【解決手段】 移動作業機1の作業領域A0の全域を外部から撮影する撮影手段64と、この撮影手段64からの画像に画像処理を施す画像処理手段66とを備えて、作業領域A0における移動作業機1の絶対位置を計測するように構成した。
(もっと読む)
車両位置特定装置
【課題】 車両の現在位置と、走行車線をより確実に特定する。
【解決手段】 信号機を魚眼レンズで撮像し、抽出した信号機画像から車両に対する仰角と水平角を算出し、これと信号機の位置座標、高さとから車両の現在位置を特定する。更に、車道外側線から信号機までの道路幅方向の距離と車線幅とから、走行車線を特定する。
カメラによる撮像対象として、走行する道路上及び周辺に多数存在する信号機を撮像するようにしているので、頻繁に走行道路上の正確な車両位置を特定することが可能になる。また、常時光りを発している信号機を撮像及び認識の対象としているので、夜間、雨天などの悪環境であっても、確実に信号機の認識、抽出が可能になる。従って、夜間や雨天等であっても、車両位置や走行車線を確実に特定することができる。
(もっと読む)
車両の側方周囲の、ビデオベースの監視及び測定のための方法及び装置
初期の市販の運転者支援システムにおいては、適用形態により、走査の解像度と走査される領域の大きさのどちらを重要視するかを考える必要がある。従来のビデオベースのシステムは、解像度と記録範囲の両方を十分兼ね備えてはいるが、一般に、直接の距離情報を供給しない。本発明の目的を有する新規な設備によれば、路上走行車内に設置した場合には、複雑かつダイナミックな場面、たとえば、ダイナミックに動作している車両の視点から、道路の縁に対する側方の3D幾何学的形状を記録し、駐車する際にこれを利用することができるシステムを実現することができる。本発明によれば、車両の側方周囲の監視及び測定は、一方では、ディジタル画像を備えたカメラにより、他方では、画像にタイムスタンプを提供し、かつこれをバッファ処理するよう機能するコンピュータユニットにより表示される。車両の移動は、上記のデータに基づいて、バッファ処理された画像から画像の対を選択するために、さらに記録される。したがって、車両の側方周囲の局所3D深さ画像が、立体画像処理用のアルゴリズムによって生成できる。 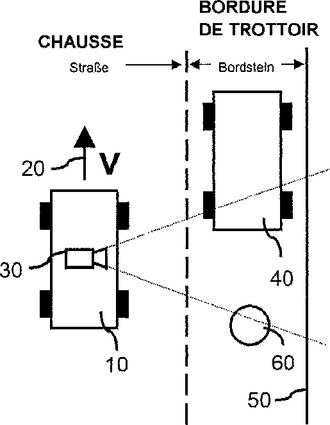 (もっと読む)
(もっと読む)
洗車機
【課題】 本発明の課題は、1台のカメラ装置で撮像される画像に基づいて、カメラ装置で取り込まれた装備品の画像データをカメラ位置を基準とした距離データに変換し、装備品の位置を正確に検出することにある。
【解決手段】 洗車機本体1に取り付けられ洗車処理する自動車の所定部位を含む領域を撮像するカメラ装置7A,7Bと、カメラ装置7A,7Bで撮像した画像の中から自動車の装備品を抽出し、抽出した装備品の画像中における位置を、装備品の取付データ及びカメラ装置の取付データに基づいて実際のカメラ装置から装備品までの距離に変換し、装備品の位置を検出する装備品位置検出部29,31とを備えたものである。
(もっと読む)
画像処理装置及びロボット装置ならびに車両誘導装置
【課題】
画像処理装置において、広い範囲にある対象物に対して、屋外や強い照明下においても安定して形状復元する。
【解決手段】
画像処理装置において、画像入力手段1aが時系列的に入力した画像上の特徴的な点の位置関係の変化を第1の計算手段1bが抽出する。位置関係の変化から特徴的な点の三次元位置と画像を捉えた際の視点の位置と方向を第2の計算手段1cが計算する。入力した画像と特徴的な点の三次元位置とから画像に捉えられている物体の三次元形状データを第3の計算手段が計算する。
(もっと読む)
視覚情報処理装置および適用システム
【課題】
アズビルト3D−CADデータをリアルタイムで自動生成して利用することができる視覚情報処理装置及びその応用システムを提供する。
【解決手段】
移動可能な撮像装置の画像情報を入力とし、入力画像を処理して移動空間に存在する物体のCADデータを自動的に生成する機能と自動的に更新する機能を持たせる。また、CADデータの探索指令信号を入力とし、その指令信号に基づきCADデータを探索する機能と、探索したCADデータの情報を出力する機能を持たせる。更に、その視覚情報処理装置をロボット制御装置などと組み合わせて自律制御型の各種自動機械を構成する。
(もっと読む)
車両座席用長手方向アジャスタ
【課題】車両座席用、特に自動車座席用長手方向アジャスタを提供すること。
【解決手段】少なくとも1つの第1座席レール(5)と、前記第1座席レール(5)に対して移動可能でその中で案内される少なくとも1つの第2座席レール(8)と、前記第1座席レール(5)を第2座席レール(8)にロックするための少なくとも1つのロック装置(11)であって、前記第1座席レール(5)のロック列(19)がロック装置(11)に対応付けられているロック装置(11)と、センサ(24)を有する位置認識装置(20)とを備えた車両座席用、特に自動車座席用長手方向アジャスタにおいて、前記センサ(24)がロック列(19)と協働すること。
(もっと読む)
非接触三次元物体形状測定方法
【課題】 合焦面を測定断面とし、測定対象の相対移動の結果、測定断面により測定対象を走査して、複数の測定断面の画像から合焦度に基づき輪郭線を順次抽出し、測定対象の三次元形状を測定する方法において、測定対象の相対移動方向が撮像レンズ系の光軸に垂直もしくは交差する方向に設定でき、測定対象の大きさと移動方向の設定の自由度が大きい測定法を得る。
【解決手段】 撮像レンズ系を両側テレセントリック光学系として構成し、撮像レンズ系の光軸に対して斜めに設定した測定断面ABが合焦面となるように二次元撮像素子3の受光面abを撮像レンズ系の光軸に対し斜めに設定し、撮像レンズ系の光軸に対し垂直もしくは交差する方向に測定対象1を相対移動させることにより測定断面ABにより測定対象1を走査して、複数の測定断面の画像の合焦度比較により最大合焦度の画素を検出する。
(もっと読む)
ナノスケール製造のためのボディの動きを制御する方法およびシステム
本発明は、間隔を隔てた2つの軸に対する角度的な動きを駆動システムに与えることによって展開する平面内におけるボディの並進動きを特徴とする、駆動システムに結合されたボディの動きを制御する方法およびシステムを対象としている。詳細には、一方の平面がボディが並進する平面に平行に延びている、間隔を隔てた2つの平面内における回転動きが生成される。したがって、ボディから間隔を隔てた表面に対するボディの適切な配向が容易になる。 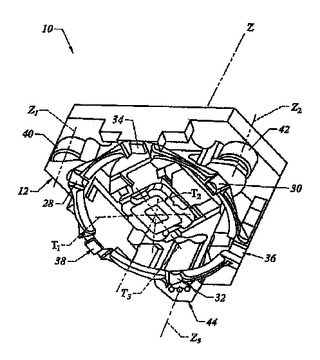 (もっと読む)
(もっと読む)
欠陥位置特定方法及びマーキングシステム
【課題】三次元対象物で検知される欠陥を高い精度で位置特定し、場合によっては、マーキングするための方法を提供すること
【解決手段】本発明は、三次元対象物(2)、特に塗装された車体上の欠陥の位置を特定する方法及びマーキングシステムに関し、撮像装置(3、4)によって、欠陥が検知され、その位置が特定される。本発明によれば、対象物(2)の設計データ(CADデータ)と撮像装置(3、4)の光学撮像特性と対象物(2)が、撮像時に既知であり、これらによって、欠陥の位置が決定され、場合によっては、スプレーヘッドによってマーキングされる。
(もっと読む)
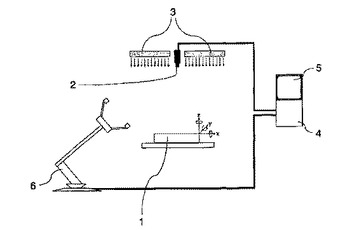
検査路設定及び検査領域決定方法
【課題】取り扱いが容易であり、全ての検査領域を確実にカバーできる検査路設定方法、及び検査領域決定方法を提供すること。
【解決手段】本発明は、三次元対象物(3)を検査するために、少なくとも1つの光学撮像装置(4)、特にカメラの検査路(2)を設定する方法に関する。撮像装置(4)と対象物(3)は、変位装置(5、6)によって、互いに相対運動が可能である。本発明に係る方法によれば、算術演算ユニット(10)によって、対象物(3)及び/又は対象物上の検査される領域(12)の設計データ(8)、特にCADデータ及び/又はセンサによって決定されたデータ、及び撮像装置(4)の光学撮像特性に基づいて、光学撮像装置(4)の検査路(2)が自動的に決定される。この場合、ある規定の幾何学的関係が、撮像装置(4)と検査される表面との間に設定される。
(もっと読む)
深度情報を含む画像の生成方法と装置
深度情報を含む画像を生成する方法と装置が提供される。この方法では、場面から発する放射を検出し、異なる面における場面の少なくとも2つの画像を形成する。各画像は強度データ値のセットを有する。データ値の変動が得られ、強度分散の2つのセットがデータ値から得られ、強度分散データは深度情報を得るために処理される。深度情報は、画像データにおける異なる深度情報を識別するためにコード化される。
 (もっと読む)
(もっと読む)
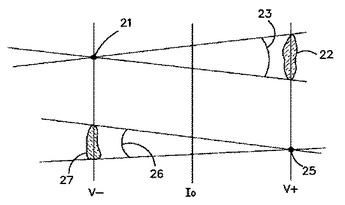
近接度検出器
光源(1)と、光源(1)により照明されるときに基準物から生じる後方散乱光を受光するための光検出器(3)とを備え、光検出器(3)への後方散乱される光の強度を近接度の尺度として利用することにより、第1の物体(目標物)と第2の物体(基準物)との間の近接度を検出するための装置に関する。目標物(2)は、焦点面(7)を有し光源(1)により照明される光学デバイス(4)を含む。光源(1)からの光線の軸と光検出器(3)への後方散乱による光線の軸とは互いに非常に接近し、ほぼ平行又は一致する部分を有する。近接度は目標物(2)と、ほぼ焦点面に位置する基準物(6,8)との間の間隔(相対位置)に相当する。  (もっと読む)
(もっと読む)
自動車のフード状部とその他の自動車ボディとの間の隙間寸法およびオフセットの少なくとも一方を調整するための方法および装置
本発明は、自動車の可動のフード状部(2)と該自動車の残りのボディ(3)との間の隙間寸法およびオフセットの少なくとも一方を調整するための方法および装置(1)に関する。フード状部(2)はまず粗調整された組付け位置で前記ボディ(3)に対してできるだけ同一平面となるようはめ込まれかつ保持される。さらに前記フード状部は、隙間寸法および/またはオフセットについてのあらかじめ定義された値ができるだけ正確に守られるように微調整される。隙間寸法および/またはオフセットをできるだけ非接触で、できるだけ簡単かつ迅速に、かつ柔軟に調整することができるようするために、微調整のために、フード状部(2)と残りのボディ(3)との間の隙間寸法および/またはオフセットについての実測値(21_ist)が光学的に検知される。隙間寸法および/またはオフセットについての検知された実測値(21_ist)とあらかじめ設定された目標値(21_soll)に従って、少なくとも1つのアクチュエータ(12)のための制御信号(24)が求められる。  (もっと読む)
(もっと読む)
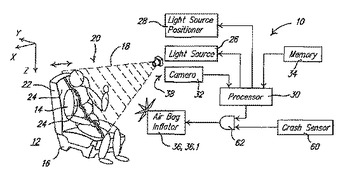
乗員検出システム
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
物体の3D位置の非接触式光学的測定方法及び測定装置
この発明は物体の3D位置、すなわち、ある幾何学的特性が公知の物体の3D位置及び3D配向の非接触式光学的決定のための方法及び装置に関する。前記発明の目的は単純な手段で、高測定速度、精度で、調査物体に関する完全な3D情報を調査することである。この目的のため、物体画像がカメラによって生成され、その生成画像に基づく物体の3D位置が、検出幾何学的特性に関する画像情報によって計算される。
 (もっと読む)
(もっと読む)
立体カメラセットを有する走査システム
走査システムは、対象物(40)の定性的及び定量的不規則性を検出する1以上の立体カメラ(10)を有する。各立体カメラセット(10)は、2つのカメラ(12,14)と投影器(16)とを有する、各カメラ(12,14)は、CCDマトリックス配列(18)の配列不良による歪みと光学システムの欠損とを補正するために較正される。投影器(16)は、測定されるべき対象物(40)に絶対符号パターン(32,34,36)を投影し、赤外、可視、紫外スペクトルの電磁気エネルギーを放射可能である。複数のカメラセット(10)は、3次元空間(26)の対象物(40)の不規則性を検出可能な走査システムマトリックス(42,44)と結合され得る。3次元空間(26)は、立体カメラセット(10)の数に応じて、任意の所望の寸法であり得る。カメラ(12,14)からのデータは、測定の表示用にデジタル信号プロセッサ(66)を介してコンピュータインターフェース(64)に送信される前に、ゲートアレイ(62)により予備処理される。結果的に、送信されるデータ量は、簡素化され、従って動作時間を減少させ、走査システムが非常に短い時間で対象物(40)の不規則性を非常に正確に測定することを可能にする。 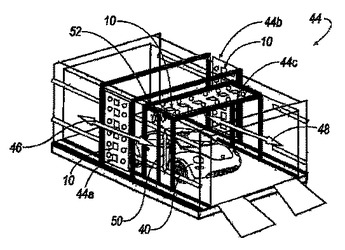 (もっと読む)
(もっと読む)
601 - 618 / 618
[ Back to top ]