
Fターム[2F065CC16]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 人体;動物 (953)
Fターム[2F065CC16]に分類される特許
941 - 953 / 953
光学測定システム及び光学測定方法

本発明は、目の網膜の画像データの取得に特に有用な光学測定システム及び光学測定方法を提供する。データの取得はOCT測定によって行われ、これらの測定の品質は、能動光学素子をビーム経路内に配置することによって改善される。 (もっと読む)
三次元分光的符号化撮像のための方法と装置
位相感知分光的符号化撮像を使用する、三次元表面測定値を得るための方法および装置が記述される。横方向および深度の両者についての情報は、単一モード光ファイバを介して送信され、本手法を小型プローブへの組み込むことが可能となる。 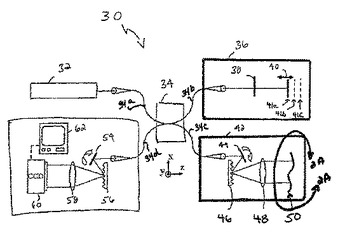 (もっと読む)
(もっと読む)
ステレオ検出器を使用して乗員および頭部ポーズを検出するためのシステムおよび方法
本願では、ステレオ検出器を使用して乗員および頭部ポーズを検出するためのシステムおよび方法を開示する。訓練ステージにおいて、ステレオカメラの対から同時に取り込まれたイメージの対が受信され、イメージの各対内の構成要素が識別される。各構成要素に対してフィーチャが関連づけられ、各フィーチャに対して値が関連づけられる。これらのフィーチャの中から、最も良好な判別能力を有するフィーチャのサブセットが選択され、イメージの対内の所与の構成要素に対して強いクラシファイアを形成する。検出ステージでは、入力されたイメージ対においてこの強いクラシファイアを使用して、構成要素が検出される。識別された構成要素は、乗員および該乗員の頭部ポーズを検出するために使用される。ステレオ検出がステレオマッチングと体系的に組み合わされることにより、乗員の検出および位置決定が改善される。  (もっと読む)
(もっと読む)
感度を高めた、眼軸の長さの干渉測定装置
行程長を調整可能な干渉測定装置と、照明装置(1)と、光線の成形および/または案内および/または結像のための光学素子と、固定光源と、眼のアライメンント状態の把握のための検出素子と、干渉信号を検出するための光検出器と、長さ測定システムと、制御・解析装置とを備えた眼軸長測定装置。固定光源(2)は、可視光を発し、照明装置は、眼内における散光成分がごくわずかしか発生しない波長900nm〜1100nmの測定光を発する。本解決法は、眼の眼軸長および/または角膜曲率および/または前房深度を測定するための複合装置に利用すると有利である。埋め込み用眼内レンズの決定に必要なデータの非接触式測定、および、伝送エラーの回避のほか、感度が高められる。 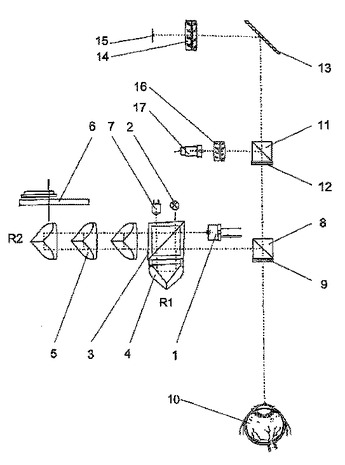 (もっと読む)
(もっと読む)
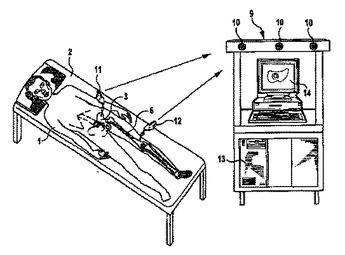
股関節プロテーゼの可動性を判定するための方法及び装置
股関節プロテーゼの可動性を判定するための方法を提案する。この股関節プロテーゼは、寛骨に挿入することができるベアリングカップと、大腿骨に挿入することができ、かつ前記ベアリングカップに球状関節面により旋回可能に取り付けられる補綴骨幹部とを含む。本方法は、前記補綴骨幹部を備えた大腿骨が様々な方向に可能な限り旋回されること、このプロセスの間に、前記ベアリングカップの中心点と前記球状関節面の中心点とが互いから離れるように移動するか否かが判定されること、及び、各旋回方向について、前記2つの中心点が互いから離れるように移動し始める最大旋回角度が決定されること、を特徴とする股関節プロテーゼの可動性判定方法。更に、この方法を実施するための装置も提案する。
 (もっと読む)
(もっと読む)
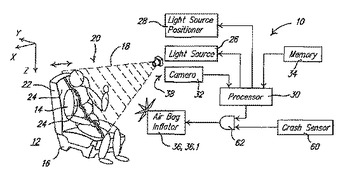
乗員検出システム
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
高速マルチプルライン三次元デジタル化法
【解決手段】 本システムは、物理的対象物を三次元画像化するための高速マルチプルラインデジタル化を提供する。フルフレームの三次元データが、デジタルカメラのフレームレートと同じ程度に取得される。 (もっと読む)
放射の散乱/反射要素の位置測定のシステム及び方法
放射散乱/反射要素の位置を判定するための方法及びシステムであって、放射透過性要素面で放射入射する面に放射エミッタが設けられる。この入射放射は散乱/反射要素により散乱/拡散/反射され、透過性要素により、この要素位置を判定できる検出器に向けてガイドされる。  (もっと読む)
(もっと読む)
マイクロエレクトロニクスにおける寸法検査のための光学フーリエ変換の使用
本発明は、
-像焦点面における物体の基本的な表面の光学フーリエ変換像を形成する手段と、
-検出手段によって提供された情報から少なくとも1つの物体の寸法的および/または構造的な特徴に関連するデータを生成する処理手段と、
を含むことを特徴とする、物体の寸法的または構造的な特徴を測定するための装置に関する。 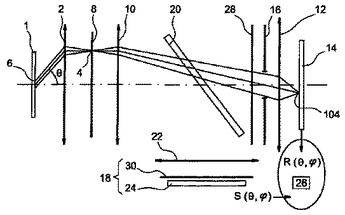 (もっと読む)
(もっと読む)
透過および反射型の空間ヘテロダイン干渉法(SHIRT)測定
透過および反射型の空間ヘテロダイン干渉法(SHIRT)測定のシステムおよび方法が記載される。方法は、第1の基準ビームおよび対象ビームを用いて、第1の空間的にヘテロダイン化されたホログラムをデジタル記録し、第2の基準ビームおよび対象ビームを用いて、第2の空間的にヘテロダイン化されたホログラムをデジタル記録する。また方法は、第1の解析されるイメージを規定するために、デジタル記録された第1の空間的にヘテロダイン化されたホログラムをフーリエ解析し、第2の解析されるイメージを規定するために、デジタル記録された第2の空間的にヘテロダイン化されたホログラムをフーリエ解析し、第1の結果を規定するために第1の解析されたイメージをデジタルフィルターし、第2の結果を規定するために第2の解析されたイメージをデジタルフィルターし、そして第1の結果に第1の逆フーリエ変換を施し、第2の結果に第2の逆フーリエ変換を施す。 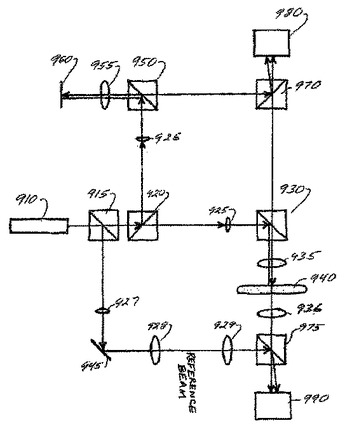 (もっと読む)
(もっと読む)
光断層映像法による画像化

【解決手段】 対象物のデジタル画像は、隠され、遮られ、又は視認できない対象物の部分の表示を含んでいる。画像は、歯群の多次元の視覚的表示である。歯群とその表面、輪郭及び形状の特性が判定及び/又は分析される。光は、歯群に向けて送られ、そこから反射される。反射光は基準光と組み合わせられ、歯肉下組織のような隠された領域を含む歯群の特性が判定される。 (もっと読む)
実立体モデル作成装置、立体データ作成装置、疑似立体データ作成装置並びにその方法
【課題】 レーザ光を対象物上にスキャンして三次元形状データを得るには、そのスキャンにかなりの時間がかかりその間対象物が静止している必要があり、人物などの三次元形状データを得るのは、難しいという問題があった。
【解決手段】 データ入力部10において、カメラを用い対象物の複数の画像を得る。この画像に基づいて、モデリング部12において、色彩データを含む三次元形状データを得る。この三次元形状データに基づいて成形部14において実立体モデルを成形する。これは切削や成形型による成形によって行われる。そして、色づけ部16により、色彩データに基づいて、実立体モデルに対し色づけが行われる。
(もっと読む)
3次元情報入力カメラ
【課題】 被写体や照明光の影響を受けることなく、正確な3次元情報の入力が可能である3次元情報入力カメラを提供する。
【解決手段】 3次元情報入力カメラは、被写体または照明光についての撮影条件を検出する撮影条件検出手段を備える。投影手段1は、2種以上のパターン光を選択可能に投影できるように構成される。投影手段1は、撮影条件検出手段による被写体または照明光についての撮影条件検出結果に基づいて、投影するパターン光の種類を選択して投影する。
(もっと読む)
941 - 953 / 953
[ Back to top ]