
Fターム[2F065FF12]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 光レーダ法 (401) | 光パルス (96)
Fターム[2F065FF12]に分類される特許
1 - 20 / 96
三次元レーザ計測システムおよび路面の縦断プロファイルの作成方法
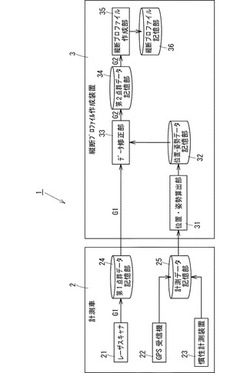
【課題】複雑で時間のかかるキャリブレーションを必要とせずに、高精度の路面の縦断プロファイルを作成できる移動式の三次元レーザ計測システムを提供する。
【解決手段】本発明の計測システムでは、以下の3段階のステップで路面の縦断プロファイルを作成する。最初に、計測車2に搭載されたレーザスキャナ21を用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データG1を取得する。次に、第1の三次元点群データG1を、計測車2に搭載されたGPS受信機22および慣性計測装置23を用いて取得したデータに基づいて修正して、地理座標系で表示された第2の三次元点群データG2を作成する。最後に、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データG3を切り出し、この第3の三次元点群データG3に基づいて、路面の縦断プロファイルを作成する。
(もっと読む)
撮像装置、撮像方法、及びプログラム

【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
雲の含水率を決定する方法
【課題】雲の含水率を決定する方法を提供する。
【解決手段】雲の含水率は、雲の水滴サイズ分布から導出される。雲の水滴のサイズ分布を決定する方法は、雲の深さを電磁放射ビームによりサンプリングすることと、雲から戻った電磁放射のエコー強度を検出器により測定することと、測定エコー強度から測定光減衰係数を決定することと、測定エコー強度から測定後方散乱係数を決定することと、測定光減衰係数及び測定後方散乱係数からライダー比を決定することと、ライダー比から水滴の形状パラメータ(μ)及びメジアン体積径(DMVD)を含む値ペアを決定することと、値ペア(μ,DMVD)を使用して水滴のサイズ分布を決定することとを含む。
(もっと読む)
画像測定装置
【課題】簡単な構造で容易に対象エリア、又は測定対象の画像が取得できると共に対象エリアの測定が行える画像測定装置を提供する。
【解決手段】投光光軸26と照明光29を射出する光源27とを有し、前記投光光軸を経て前記照明光を投射する投光光学系5と、受光光軸15と撮像素子13とを有し、測定対象からの再帰反射光29′を前記受光光軸を経て撮像素子で受光する受光光学系6と、前記撮像素子で撮像されたデータを処理する制御演算装置7とを具備し、前記投光光学系は前記投光光軸を測定対象に向け前記照明光を投射する投光ユニット25と、該投光ユニットを高低方向、水平方向に回転し、前記照明光の投射角を変更する投射角変更手段23,33と、前記受光光軸に対する前記投光光軸の方向角を検出する方向検出手段24とを有する。
(もっと読む)
三次元測定対象物の形態調査方法
【課題】レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
(もっと読む)
レーザースキャンセンサ
【課題】通常姿勢の人間に対する検知性能を維持しつつ、さらに、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知との両立をも実現可能なレーザースキャンセンサを提供する。
【解決手段】レーザー距離計110と、スキャン機構120と、距離データ取得部130と、メモリ160と、取得された距離情報の中から人体に対応する可能性がある物体を検知するとともに、その物体の高さおよび幅をメモリ160に記憶されている設置状態情報にも基づいて算出し、算出された物体高さが所定高さ以上の場合はその物体の検知が第1所定時間以上継続したときに人体であると判定するとともに、算出された前記物体高さが前記所定高さ未満の場合はその物体の検知が前記第1所定時間よりも長い第2所定時間以上継続したときに人体であると判定する人体判定部140と、警告出力制御部150とを備える。
(もっと読む)
情報処理装置及び情報処理方法
【課題】計測装置と計測対象物体との間の位置または/及び姿勢の関係があいまい性を含んだ場合であっても、高精度に物体の位置姿勢を計測できるようにする。
【解決手段】撮像時刻におけるロボットのモーション情報から、撮像装置と対象物体の位置姿勢移動量に変換して計測データとして位置姿勢更新に用いる。ロボットのモーション差分という確度の高い情報を計測データとして加えることにより、精度および安定性を向上させるようにする。また、撮像時刻の異なる距離画像と濃淡画像の幾何的関係を、ロボットアームの軌跡情報を用いて求めることで、両者の情報を同時に利用して位置姿勢推定を行うようにすることにより、全体のデータを同時に用いることを可能にする。
(もっと読む)
基板検査装置および基板検査方法
【課題】基板に形成された凹部の形状を、非破壊、非接触にて検査する技術を提供する。
【解決手段】基板検査装置100は貫通ビアWH(凹部)が形成されている基板Wを検査する。基板検査装置100は、ポンプ光の照射に応じて、基板Wに向けてテラヘルツ波を照射する照射部12と、プローブ光の照射に応じて、基板Wを透過したテラヘルツ波の電場強度を検出する検出部13と、テラヘルツ波が基板Wの貫通ビア形成領域を透過する透過時間と平坦領域を透過する透過時間との時間差を取得する時間差取得部24と、該時間差に基づいて貫通ビアWHの深度を算出するビア深度算出部26とを備える。また、基板検査装置100は、ビア深度算出部26により算出した貫通ビアWHの算出深度と、干渉法を利用する深度測定装置16によって測定した貫通ビアWHの実測深度とに基づいて、貫通ビアWHの形状を示す形状指標値を取得する形状指標取得部27を備える。
(もっと読む)
3D表面形状をキャプチャーするための方法およびシステム
【課題】変形表面のキャプチャーを高解像度で得る。
【解決手段】シーンの3D画像データをキャプチャーするシステムにおいて、各々が互いに異なる波長の光を照射し、キャプチャーすべきシーンを照明するよう構成された三つの光源と、前記シーンから反射された前記光源からの光を受光するよう構成され、各光源から受光された光を分離し、前記三つの光源ごとにキャプチャーされた前記画像に関するデータを出力する第一ビデオカメラと、前記シーンの第一デプスマップをキャプチャーするよう構成されたデプスセンサと、前記第一ビデオカメラからデータを受信し、該データを処理して前記三つの光源ごとにキャプチャーされた前記画像から得られた法線領域に関するデータを取得する解析ユニットにおいて、前記法線領域に関する前記データを前記第一デプスマップのデータに合成して、前記シーンの3D画像データをキャプチャーする前記解析ユニットとを備える。
(もっと読む)
レーザ変位計
【課題】簡易な構成で距離を測定可能なレーザ変位計を提供する。
【解決手段】レーザ光を出射する光源部11、出射光の光束径を拡張し、拡張後の出射光が反射手段30で反射された反射光を集光する光束径変更部14、反射光を受光する受光部16、出射光と反射光を用い、反射手段30までの距離を算出する算出部18、その距離の変位を検出する変位検出部21、検出された変位に関する出力を行う変位出力部22、拡張前の出射光と、光束径変更部14からの反射光との一方を透過させ、他方を反射させることによって、光源部11からの出射光を、中心領域を介して光束径変更部14に透過または反射させ、光束径変更部14からの反射光を、中心領域の外側の領域である外側領域を介して受光部16に反射または透過させる反射部17aを備え、光束径変更部14は、反射光に対する有効口径が出射光の光束径より大きい。
(もっと読む)
移動環境認識装置及び方法
【課題】高速、且つ高精度に測定対象の形状認識情報を得ることができる移動環境認識装置を提供する。
【解決手段】測定対象7に対して円錐走査を行う円錐走査手段1を備えている。円錐走査手段は、移動環境検出器3と、この移動環境検出器で計測した情報を加工する外界認識装置9を備えている。この外界認識装置は、円錐走査手段の測定データに基づいて前記測定対象の傾斜角、傾斜方向及び測定対象中心までの距離を算出する移動環境検出手段と、この移動環境検出手段が算出した前記測定対象の算出データに基づき、各測定対象の面形状を判断する面形状判断手段と、この面形状判断手段が水平面と判断した所定の測定対象の形状を認識する形状認識手段とを備えている。
(もっと読む)
膜厚の検査装置および検査方法
【課題】 曲面を有する膜厚を正確に計測する。
【解決手段】 膜厚の検査装置は、テラヘルツ波を発生させるテラヘルツ波発生器15と、前記テラヘルツ波を、膜が形成された試料に照射させる照射光学系16、17と、前記試料において反射したテラヘルツ波を検出し、検出信号を出力するテラヘルツ波検出器22と、前記試料の反射面の形状情報に基づき、当該反射面から前記テラヘルツ波検出器に至るまでの反射波の電場強度を参照信号として算出し、前記参照信号を用いて前記検出信号を補正する制御装置5を備える。
(もっと読む)
距離画像カメラおよびこれを用いた対象物の面形状認識方法
【課題】様々な形状の箱などが混載されている場合であっても、それらを正確に分離して認識可能な距離画像カメラおよびこれを用いた対象物の面形状認識方法を提供する。
【解決手段】対象物へ向けて光を照射する発光部11と、反射光が戻ってくるまでの時間の測定値から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、取得した前記距離画像の各画素の前記距離情報が前記距離画像カメラからの距離を複数に分割した距離区間のいずれに対応するかを判定し、前記距離区間毎に前記距離情報が対応する画素数をそれぞれ集計した集計結果が最大であった前記距離区間いずれかを選択するとともに、そうして選択された前記距離区間のみに前記距離情報が対応する画素の2次元配置位置に基づいて前記対象物が前記距離画像カメラに対向している面の形状を認識する画像処理を行う演算制御部13とを備える。
(もっと読む)
光学式曲がり測定装置
【課題】複数本の光ファイバーを設置し難い測定対象に対しても適用でき、測定対象の複数個所の特定方向の曲がり量を独立に測定し得る光学式曲がり測定装置を提供する。
【解決手段】光学式曲がり測定装置は、測定光を供給する光源ユニット110と、測定光を伝達する光ファイバー120と、光ファイバー120の異なる複数の部分に設けられた複数の光学特性変化部材150A,150B,150Cと、光ファイバー120から出力される光を検出する光検出ユニット140を備えている。各光学特性変化部材150A,150B,150Cは、これが設けられた光ファイバー120の部分の特定方向の曲がり量に応じてこれに入射した光に光学特性の変化を与える。光検出ユニット140は、光学特性の変化を受けた光を分離して検出し、その検出光強度に基づいて光ファイバー120の複数の部分の特定方向の曲がり量を独立に測定する。
(もっと読む)
光学式検出装置、表示システム及び情報処理システム
【課題】従来よりも小型な構成で対象物の位置を検出することができる光学式検出装置、表示システム及び情報処理システム等を提供すること。
【解決手段】光学式検出装置100は、照射光LTを出射する照射部EUと、照射光LTが検出エリアRDETに存在する対象物OBに反射されることによる反射光LRを受光する受光部RUと、受光部RUの受光結果に基づいて対象物OBの位置情報を検出する検出部110とを含む。照射部EUは、照射部EUの一端から検出エリアRDETに対して出射される第1の照射光と、照射部EUの他端から検出エリアRDETに対して出射される第2の照射光と、照射部EUの一端と他端との中間部から検出エリアRDETに対して出射される第3の照射光とがそれぞれに交差し、且つ、第1、第2、及び第3の照射光のそれぞれの強度が異なるように、照射光LTを出射する。
(もっと読む)
対象物検出装置、対象物検出方法
【課題】処理負荷を大きくすることなく、検出対象物が遠近離れて複数存在する場合の検出精度を高める。
【解決手段】入力画像に関する撮像対象までの距離情報を取得する距離情報取得部と、距離情報に基づいて、入力画像に対して距離区分を設定する距離区分設定部と、距離区分毎に、探索ウィンドウのサイズを設定するウィンドウサイズ設定部と、距離区分毎に、設定されたサイズの探索ウィンドウを用いて入力画像のスキャンを行なうスキャン部と、探索ウィンドウ内から検出対象物の検出処理を行なう検出処理部とを備えた対象物検出装置。
(もっと読む)
物体検出ユニット
【課題】物体の誤検出を抑えたい領域と、物体の見逃しを抑えたい領域とが、混在する検出空間に対して、領域毎に、その領域に合わせた物体の検出が行える物体検出ユニットを提供する。
【解決手段】発光部31を発光させて入出口の幅方向に検出波を照射し、受光部32で反射波を検出する。記憶部5、物体の仮検出に用いる受光部32の受光光量の下限を設定する仮検出レベル、および仮検出した物体の本検出に用いる受光部32の受光光量であって、仮検出した物体までの距離に応じて下限を設定する本検出レベルを記憶する。測距部3は、受光部32で検出した反射波の受光光量が、記憶部5に記憶している仮検出レベルを超えているときに、物体を仮検出するとともに、この仮検出した物体までの距離を算出する。制御部2は、本検出レベルを用いて、仮検出した物体が物体であるかどうかを判定する。
(もっと読む)
三次元形状測定装置
【課題】光パルスの検出タイミングにかかわらず、奥行き方向の空間分解能及び測定精度を向上可能である三次元形状測定装置を提供する。
【解決手段】色が規則的に経時変化する光パルスを生成するチャープ導入装置と、前記光パルスをワークに照射し切り出すことで該光パルスの反射光像を取得する反射光像取得部と、反射光像を分光し複数のカラーチャンネルでの各色情報を二次元位置毎に取得する色情報取得部とを備える。前記各色情報に対応する分光特性は、前記光パルスの波長範囲において少なくとも2つが交差する。
(もっと読む)
乗員検知装置
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
1 - 20 / 96
[ Back to top ]