
Fターム[2F065FF64]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 速度 (189)
Fターム[2F065FF64]に分類される特許
1 - 20 / 189
三次元レーザ計測システムおよび路面の縦断プロファイルの作成方法
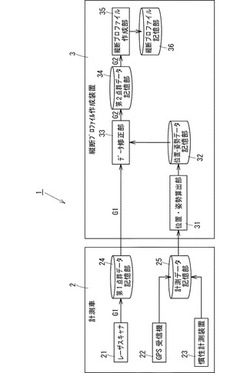
【課題】複雑で時間のかかるキャリブレーションを必要とせずに、高精度の路面の縦断プロファイルを作成できる移動式の三次元レーザ計測システムを提供する。
【解決手段】本発明の計測システムでは、以下の3段階のステップで路面の縦断プロファイルを作成する。最初に、計測車2に搭載されたレーザスキャナ21を用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データG1を取得する。次に、第1の三次元点群データG1を、計測車2に搭載されたGPS受信機22および慣性計測装置23を用いて取得したデータに基づいて修正して、地理座標系で表示された第2の三次元点群データG2を作成する。最後に、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データG3を切り出し、この第3の三次元点群データG3に基づいて、路面の縦断プロファイルを作成する。
(もっと読む)
光ファイバのマーク検出装置及びその検出方法

【課題】光ファイバの素線に付されたマークの検出をインラインで実行可能とする光ファイバのマーク検出装置を提供する。
【解決手段】光ファイバの素線(21)に付与されたマーク(M)を検出する装置であって、レーザ光(LS1)を出光する出光部(11a)及びレーザ光(LS2)を受光する受光部(11b)を有し、受光部(11b)で受光したレーザ光(LS2)の強度に応じた信号を出力する検出部(11)と、レーザ光を反射する底面(12b)を有する溝部(12a)が設けられた素線案内部材(12)と、を備える。検出部(11)は、素線(21)を素線案内部材(12)の溝部(12a)内における底面(12b)に接触させた状態で、素線(21)を間にして素線案内部材(12)と対向すると共に出光部(11b)からのレーザ光(LS2)が少なくとも素線(21)に照射されるよう配置されている。
(もっと読む)
路面分析
【課題】車両が走行しようとする路面を分析し、車両の安全性および制御を向上させる。
【解決手段】システム10は、シリコン網膜11のようなAERカメラを用いる。このシリコン網膜11を用いて、走行しようとする路面をモニタリングする。そして、処理ユニット12が、そのシリコン網膜によって提供された信号に基づいて、路面を分析する。路面分析方法は、上記のシステム10によって実行され、従来の分析方法を凌駕するものである。
(もっと読む)
スキージ観察装置及びスキージ観察方法
【課題】基板上にソルダーペーストを印刷するスキージのスキージング中における撓り状態を、精度良く検証することの可能な技術を提供する。
【解決手段】透明な平板材と、平板材の上面に接するようにスキージを保持し、スキージを平板材の上面に沿ってスキージングさせるスキージ駆動手段と、平板材の下方に配置されており、スキージング中のスキージを、平板材を透して撮像する撮像手段と、を備える。スキージのうち、スキージング中の進行方向側に面するスキージ面には、スキージの撓りに応じて変形する所定の模様が設けられている。
(もっと読む)
部品実装装置、および、三次元形状測定装置
【課題】影の影響を除去し正確に位相シフト法による三次元データを高速に取得する。
【解決手段】直交する第一方向と第二方向とに撮像画素が行列状に並ぶエリアイメージセンサ111を有するカメラ101と、カメラ101と測定対象物200とを第一方向に相対的かつ連続的に移動させる移動手段102と、第一アングルで第一周期光を照射する第一照射手段131と、第二アングルで第二周期光を照射する第二照射手段132と、第一照射時間と第二照射時間とが重ならないように制御する照射制御手段104と、エリアイメージセンサ111の複数の第一ライン171を用い、第一照射手段131が照射する際の対象部分の像を取得し、複数の第二ライン172を用い、第二照射手段132が照射する際の像を取得する像取得手段105とを備える。
(もっと読む)
車両周辺情報提供システム及びその方法
【課題】道路の地面と周辺移動物体に対する正確な位置情報が得られる車両周辺情報提供システム及びその方法を提供する。
【解決手段】この車両周辺情報提供システムは、予め定めた間隔で車両に設けられる複数の映像獲得部と、映像獲得部のうち少なくとも二つ以上を選択し、選択された映像獲得部から映像データを受信する映像獲得部選択器と、映像獲得部選択器から受信した映像データから障害物認識及び位置を算出し、車両の車速情報に従い映像獲得部のうち少なくとも二つ以上の映像獲得部を選択するように映像獲得部選択器を制御する制御部と、を含んで構成される。
(もっと読む)
位置・姿勢推定可能な移動体システム及び自律移動ロボットシステム
【課題】照射するレーザ光の反射光によって周囲の幾何的特徴を識別し、自装置の現在位置・姿勢を推定する際、幾何的特徴に乏しい環境においても確実に位置・姿勢を推定することが可能な移動体システムを提供する。
【解決手段】光学作用部材35を移動経路の棚や壁面等の障害物32に任意な位置と間隔にて取り付け固定する。これにより、移動体10から照射されるレーザ光は、障害物32から距離センサ部12に向けて反射するが、光学作用部材35からは反射光が到達しないため、反射光によって得られる幾何形状データ34に新たな幾何的特徴を生成することができ、移動体10は容易に自装置の現在位置及び姿勢を推定することができる。
(もっと読む)
車両用画像生成装置及び車両用画像生成方法
【課題】車両周囲画像に含まれる他車両の任意視点から見た画像を、より正確に生成する装置を提供する。
【解決手段】車両用画像生成装置を、3次元構造を有する車両周囲画像に含まれる他車両の可視画像部分の画像情報に基づき、他車両の死角部位の形状や色などの情報を推測する死角情報推測部25と、死角情報推測部25で推測された死角情報に基づき、可視画像部分データから死角部位を補完するための補完画像データを生成し、生成した補完画像データを用いて他車両の死角部位の画像を補完する画像補完部26と、仮想視点設定部27から入力される仮想視点情報に基づき、補完後の車両周囲画像を仮想視点情報の示す視点から見た画像に再構成する画像再構成部28と、を含む構成とした。
(もっと読む)
3次元計測装置およびその方法
【課題】計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる3次元計測装置を提供する。
【解決手段】撮像装置12により撮像された画像データを含む撮像情報を取得する撮像部11と、撮像情報に基づいて計測対象の3次元座標を取得する3次元形状演算処理部23と、撮像装置12の加速度および姿勢角度を含む位置姿勢情報を撮像情報の取得と同期して取得する位置姿勢計測部14と、位置姿勢情報に基づいて計測原点に対する撮像装置12の移動量・方向と姿勢角度の変化量・方向とを演算する位置姿勢補正処理部17と、撮像情報と同期して取得された撮像装置12の移動量および方向と姿勢角度の変化量および方向とに基づいて3次元形状演算処理部23により得られる3次元座標を平行移動および回転して複数の3次元座標を統合し、計測対象の3次元形状を取得する統合演算処理部24とを備えた。
(もっと読む)
移動体位置検出装置
【課題】移動体の進行方向を、簡便な手法によって精度よく検出することができるようにする。
【解決手段】物体検出センサ1によって、移動体としての車両V周囲の物体が検出される。GPS3によって、誤差を含んだおおまかな車両Vの位置、方位が測位される。地図データ4と物体検出センサ1で検出された検出データとを、直交座標系を用いてマッチングさせて、車両Vの現在位置の測位が行われる。車両Vの位置を原点とする極座標系を用いて、地図データと検出データとをマッチングさせて、車両Vの進行方向が決定される。
(もっと読む)
情報処理プログラム、情報処理方法、情報処理装置および情報処理システム
【課題】マーカを精度良く認識する点について改善された情報処理プログラム等の提供。
【解決手段】情報処理装置のコンピュータを、画像を逐次取得する画像取得手段、取得された画像から特定対象を検出する特定対象検出手段、検出された特定対象の中央領域から得られた画素値に基づいて、当該中央領域に関連する第1領域情報を検出する第1領域情報検出手段、その検出結果が所定の条件を満たすか否かを判定する第1判定手段、特定対象のうち中央領域の周辺に存在する周辺領域から得られた画素値に基づいて、当該周辺領域に関連する第2領域情報を検出する第2領域情報検出手段、および少なくとも、第1判定手段による判定結果が肯定である場合に第2領域情報検出手段により検出された第2領域情報を出力する出力手段として機能させるための情報処理プログラム。
(もっと読む)
ロボット装置
【課題】高精度なエンコーダーを用いずに、可動部の位置制御を高精度に行うロボット装置を提供する。
【解決手段】基体1と、基体1に対して駆動可能な可動部2と、可動部2を駆動するアクチュエーター3と、可動部2とともに動く部分に取り付けられた慣性センサー4と、画像を撮影し画像により慣性センサー4の位置または角度を検出する絶対位置検出部として、画像センサー5及びマーカー6と、画像センサーにより検出された位置情報の間を、慣性センサー4の信号で補間する演算部9と、を備える。
(もっと読む)
走路推定装置及びプログラム
【課題】片側車線しか検出されない場合でも、俯角を固定することなく、走路に対する撮像装置の姿勢角を含むソロパラメータを推定する。
【解決手段】特徴点抽出部20により撮像装置12で撮像された撮像画像を取得して、撮像画像から特徴点を抽出し、車線境界点選択部22により、抽出された特徴点から車線を示す車線境界点を選択し、車線境界点記憶部24に一旦記憶する。走路パラメータ推定部26により、二時刻間でヨー角及び曲率が変化しないとの仮定の下で、二時刻間の横位置の変化を速度V及びヨー角を用いて表すことで、二時刻間の走路パラメータを関係付け、二時刻の各々で選択された車線境界点群と、走路パラメータにより定まる車線境界線との最適化により、走路パラメータを推定する。
(もっと読む)
表面検査装置、表面検査方法およびフィルムの製造方法
【課題】
被検査面が円筒側面形で鏡面反射性を有し、円筒中心軸に対して回転する前記被検査面に対応する曲率および前記被検査面の位置の少なくとも一方が経時的に変化する被検査体表面に発生する微小な凹凸欠点を精度よく検出できないという問題点を解決する。
【解決手段】
被検査体に明暗パターンの光を照射する光照射手段と、前記被検査体から反射した前記明暗パターンを撮像する撮像手段と、前記撮像手段で撮像した前記明暗パターンを含む撮像画像に基づいて前記被検査体の表面を検査するデータ処理手段とを備える表面検査装置であって、データ処理手段が、撮像手段により連続で撮像された2枚の画像から、各画像内の明暗パターン領域を比較することにより、微小な凹凸欠点を高精度に検出できる。
(もっと読む)
移動物体検出装置
【課題】レーダを用いることなく、車両に搭載された撮影手段によって撮影された画像から、車両の進行方向を横切る移動物体を精度良く検出すること。
【解決手段】車両の進行方向に対応する、画像の無限遠点とビデオカメラ10の焦点とを結ぶ線分と、車両から見た移動物体の実際の動きベクトルの向きに対応する、各特徴点の消失点とビデオカメラ10の焦点とを結ぶ線分がなす角度を、車両の進行方向に対する各特徴点の相対的進入角度として算出する。そして、算出した各特徴点の相対的進入角度が所定の閾値θth以上であるかにより、移動物体が、車両の進路を横切る進路横断移動物体であるか否かを判定する。
(もっと読む)
形状測定システム及び形状測定方法
【課題】スキャナを用いた形状測定システムにおいて、いわゆる手振れによる測定誤差を低減することをその目的とする。
【解決手段】形状測定システム1は、多関節アームの先端に取り付けられ、測定対象Aに対し手動で移動可能であり、測定対象Aに対しレーザ光を照射しその反射光を、光センサ61の複数の受光ラインで順次検出するスキャナ21と、スキャナ21の手振れ情報を光センサ61の受光ライン毎に取得する加速度センサ42と、各受光ラインのスキャナ21の手振れ情報に基づいて、受光ライン毎に画像の位置情報を補正する手振れ補正部80と、スキャナ21の画像情報と手振れ補正部80で補正された画像の位置情報に基づいて、測定対象Aの画像を生成する画像生成部100と、を有する。
(もっと読む)
ロール変位測定方法、及びそれを用いたロール変位測定装置、並びにフィルム厚測定方法、及びそれを用いたフィルム厚測定装置
【課題】被測定物が掛けられるロールの変位を高精度に測定し、被測定物の材質に拘わらず、被測定物の厚さ寸法を高精度に測定する。
【解決手段】ロール2の周面に、ロール軸に沿って延びる複数のマーキング2aを平行に設け、検出ヘッド5に、前記マーキングの接近を検出する近接センサ18,19を、前記ロールの中心軸を挟んで相対向する位置にそれぞれ設け、前記ロールにフィルム20が掛けられていない状態で、前記検出ヘッドを走査し、前記相対向する近接センサの間における第一の検出時間差と、前記ロールにおける第一の回転速度とを求めるステップと、前記ロールにフィルムが掛けられた状態で、前記検出ヘッドを走査し、前記相対向する近接センサの間における第二の検出時間差と、前記ロールにおける第二の回転速度とを求めるステップと、前記第一及び第二の検出時間差と、前記第一及び第二の回転速度とに基づいて、前記ロールの変位を求める。
(もっと読む)
検知装置、及び、検知方法
【課題】車両の側方に搭載されたカメラが撮影した車外画像のみに基づいてカメラの光軸の位置ズレを簡易に検知できる技術を提供する。
【解決手段】車両と相対的に移動する物体の像の車外画像中の移動軌跡と基準となるラインとを比較してカメラの光軸の位置ズレを検知するため、検知装置はカメラの光軸の位置ズレを車外画像のみで簡易に検知することができる。
(もっと読む)
車載情報装置,ナビゲーション装置
【課題】車速パルスのパルス抜けが発生している期間中の車両の走行距離を高精度で算出できる車載情報装置を提供する。
【解決手段】車載情報装置1の制御部10は、カメラ23が撮影した車輪21の撮影画像を取得する。制御部10は、取得した撮影画像と記憶部11のテンプレートデータベース111に記憶されている車輪21のテンプレート画像とのパターンマッチングに基づいて車輪21の回転数を取得する。制御部10は、車速センサ22が出力する車速パルスのパルス抜けが発生するときは、取得した車輪21の回転数に所定の係数を乗ずることにより車両2の走行距離を算出することができる。
(もっと読む)
車高計測装置
【課題】運転者自らが計測することなしにトレーラの実際の車高を計測することのできる車高計測装置を提供することを目的とする。
【解決手段】自車両の周囲の撮影画像を画像処理する画像処理手段11と、この画像処理手段11による処理画像に基づいて自車両が牽引するトレーラの車高を算出する算出手段13とを備え、算出手段13は、画像処理手段11が画像処理した自車両前方の撮影画像および自車両が牽引するトレーラ後方の撮影画像とに基づいて自車両が牽引するトレーラの車高を算出する。
(もっと読む)
1 - 20 / 189
[ Back to top ]