
Fターム[2F065HH05]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 強度分布 (4,196) | スリット光;帯状光 (915)
Fターム[2F065HH05]に分類される特許
161 - 180 / 915
3次元形状測定機の校正方法及び3次元形状測定機
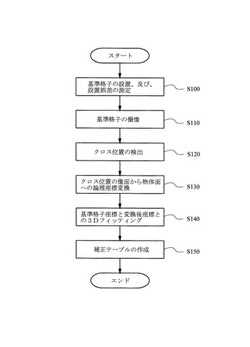
【課題】撮像系の歪み補正を行うことができる3次元形状測定機の校正方法、及び、この校正方法により校正された3次元形状測定機を提供する。
【解決手段】被検物16にライン光を投影するライン光投影装置15と、投影されたライン光の像を取得する計測カメラ11と、を有し、被検物16の3次元座標を算出する3次形状測定機1において、3次元座標に含まれる計測カメラ11の歪みを補正する校正方法であって、物体面上に設置した基準点の像を取得するステップと、この像に基づいて、像面から物体面上の座標に座標変換した基準点の3次元座標(変換座標)を求めるステップと、基準点の予め測定された3次元座標と変換座標とを最小二乗式によりフィッティングしてフィッティング係数を求めるステップと、このフィッティング係数により、補正データを算出するステップと、を有する。
(もっと読む)
3次元形状測定機の校正方法及び3次元形状測定機

【課題】ライン光照明系の歪みが高精度に校正するための3次元形状測定機の校正方法、及び、この校正方法により校正された3次元形状測定機を提供する。
【解決手段】被検物17にライン光を投影する照明部であるライン光投影装置16と、被検物17上に投影されたライン光の像を取得する撮像部である測定カメラ11と、を有し、前記像から被検物17の3次元座標を算出する3次元形状測定機1において、3次元座標に含まれるライン光投影装置16の歪みを校正する3次元形状測定機1の校正方法であって、ライン光投影装置16の光軸に対して略垂直に拡散面21aを配置するステップと、ライン光投影装置16部により拡散面21aにライン光を照射して測定カメラ11でライン光の像を取得するステップと、取得した像から3次元座標を校正する補正データを算出するステップと、を有する。
(もっと読む)
欠陥検査装置
【課題】欠陥検査装置では検出倍率を上げて微細欠陥検出感度を向上させるため、焦点深
度が浅くなり、環境変動によって結像位置がずれ、欠陥検出感度が不安定になる課題があ
る。
【解決手段】被検査基板を搭載して所定方向に走査するXYステージと、被検査基板上の
欠陥を斜めから照明し、その欠陥を上方に配した検出光学系で検出する方式で、この結像
状態を最良の状態に保つために、温度及び気圧の変化に対して、結像位置変化を補正する
機構を備えたことを特徴とする欠陥検査装置。
(もっと読む)
欠陥検査装置
【課題】本発明は、スリットレーザ光等を、回転体状の測定対象に照射し、測定対象からの反射光を撮影した二次元画像に基づいて、回転体状かつ表面が高い反射率を有する測定対象の欠陥を高精度に検出する欠陥検査装置を実現することを目的とする。
【解決手段】本発明は、回転または直線移動する測定対象にスリット光を照射する光源と、前記測定対象からの反射光を受光してその二次元画像を出力する受光部と、前記二次元画像に基づいて、前記反射光がそのスリット幅に相当する領域以外の領域に現れるか否かによって、前記測定対象の欠陥を検出する欠陥検出手段と、を備えることを特徴とする。
(もっと読む)
形状測定装置および形状測定方法
【課題】凹凸形状の測定精度の向上を図ることができる形状測定装置を提供する。
【解決手段】本発明の形状測定装置は、測定対象1の凹凸形状にライン光を照射する投光装置2と、前記投光装置2によって前記凹凸形状に形成される光切断線を撮像する撮像装置3と、前記凹凸形状の上底及び下底の各々で前記光切断線の幅が最小になるように前記投光装置2をその光出射軸方向4に移動させる駆動装置5と、前記撮像装置3によって撮像された、前記凹凸形状の上底で前記光切断線の幅が最小となる画像と、前記凹凸形状の下底で前記光切断線の幅が最小となる画像に基いて、前記凹凸形状の高さ又は深さを算出する処理装置6と、を備える。
(もっと読む)
表面形状計測方法およびその装置
【課題】外乱光が存在する場合でも正確に被計測部材の表面形状を計測することのできる表面形状計測方法およびその装置を提供する。
【解決手段】スリット光画像の長さ方向に直交する画素列を列番号第1列として、第1列目の第1所定範囲内の画素の輝度値から初期中心位置G0を求め、初期中心位置G0を中心とし、第1所定範囲より狭い第2所定範囲(参照光幅)内の画素の輝度値から第1列目の中心位置G1を求める。第2列以降の第i列〜第n列までは、第(i−1)列目の中心位置G(i−1)を中心として第2所定範囲内の画素の輝度値を加重平均して第i列目の中心位置Giを求めて、中心位置G1〜Gnを求めG1〜Gnを接続して表面形状を求める。
(もっと読む)
架線位置測定装置
【課題】効率よく正確に架線の位置を測定することができる架線位置測定装置を提供する。
【解決手段】架線位置測定装置において、架線を撮影する第1のラインセンサカメラ1及び第2のラインセンサカメラ2と、架線までの距離を計測するレーザ距離計3と、第1のラインセンサカメラ及び第2のラインセンサカメラから出力された画像データを基にラインセンサ画像上の架線の位置情報を算出する第1の画像処理部10及び第2の画像処理部11と、ラインセンサ画像上の架線の位置情報とレーザ距離計3から出力された距離情報とを記憶する処理メモリ12と、ラインセンサ画像上の架線の位置情報と距離情報とに基づきステレオ対応点の探索を行うステレオ対応点探索部13と、探索したステレオ対応点に基づき架線の高さと偏位を算出する高さ・偏位算出部14とを備えた。
(もっと読む)
貼合わせ基板の位置ズレ検出装置およびそれを用いる半導体製造装置ならびに貼合わせ基板の位置ズレ検出方法
【課題】円板状の2組の基板を上下に積層して成る貼合わせ基板において、素子形成などにあたって、基板中心位置のズレ量を一括して求められるようにする。
【解決手段】輪郭測定手段3によって、貼合わせ基板2の厚み方向の投影像から2組の基板21,22を合わせた輪郭形状を検出する一方、エッジ形状測定手段4によって、周方向の複数点において、貼合わせ基板2の接線方向の投影像から2組の基板21,22それぞれのエッジ形状を検出する。そして、演算手段6が、輪郭測定手段3の検出結果から、いずれか一方の組の基板の形状データを検出し、直径および中心位置を求める一方、他方の組の基板については、その一方の組の基板の形状データを基準に、エッジ形状測定手段4で検出された2組の基板間の相対的な位置関係から、形状データを求め、直径および中心位置を求める。その後、2組の基板間の中心位置の距離から、前記ズレ量を求める。
(もっと読む)
溶接表面の欠陥検査方法
【課題】溶接部表面の溶接欠陥を短時間かつ定量的に検査可能である溶接表面の欠陥検査方法を提供する。
【解決手段】被検査物であるワーク1の溶接部6表面に発生した溶接欠陥2を検査するための溶接表面の欠陥検査方法であって、画像撮像手段であるカメラ3により前記ワーク1の溶接部6表面の画像を撮像し、当該撮像された画像の濃淡判別を行って、前記溶接部6表面における溶接欠陥2の位置を検出する溶接欠陥検出工程と、前記溶接部6表面の同一位置にある溶接欠陥2に対して複数のレーザ変位計4a、4bを用いて変位量を測定する変位量測定工程と、を有する。
(もっと読む)
三次元形状計測装置、三次元形状計測装置のキャリブレーション方法、およびロボット装置
【課題】複数の方向から計測対象物体を撮像して三次元形状を計測する三次元形状計測装置のキャリブレーションを、簡便な作業で短時間に行う。
【解決手段】三次元形状計測装置1は、キャリブレーション用ブロックと、撮像部12−1,12−2がそれぞれ撮像した撮像画像領域から、キャリブレーション用ブロックの上面に照射されたスリット光による光切断線をそれぞれ検出する光切断線検出部23と、光切断線検出部23がそれぞれ検出した光切断線から特徴点をそれぞれ検出して二次元座標値を取得する特徴点検出部24と、二つの撮像画像領域それぞれにおける特徴点の二次元座標値を単一の二次元座標系の二次元座標値に変換するための座標変換パラメーターを計算する座標変換パラメーター計算部25とを備えた。
(もっと読む)
3次元形状測定装置
【課題】光切断線の湾曲成分を除去し、太陽電池ウエハの断面形状データを精度良く算出する。
【解決手段】ウエハ形状データ取得部221は、ウエハ画像から光切断線の形状を示すウエハ形状データを取得する。標準平面形状データ取得部222は、所定の標準平面の高さを数段階変化させ、標準平面画像から各高さにおける光切断線の形状を示す標準平面形状データを取得する。形状補正部341は、ウエハ形状データと形状が最も近い標準平面形状データを、標準平面形状データ記憶部80から特定し、特定した標準平面形状データ及びウエハ形状データの差分を補正ウエハ形状データとして算出する。断面形状算出部342は、形状補正部341で算出された補正ウエハ形状データからウエハ断面形状データを算出する。
(もっと読む)
光学式位置検出装置、電子機器及び表示装置
【課題】対象物の位置に応じて効率良く位置検出ができる光学式位置検出装置、電子機器及び表示装置等を提供すること。
【解決手段】光学式位置検出装置は、X−Y平面に沿って設定される検出エリアRDETに照射光LTを出射する光出射部EUと、検出エリアRDETにおいて照射光LTが対象物OBに反射したことによる反射光LRを受光する受光部RUと、受光部RUの受光結果に基づいて、対象物OBの位置情報を検出する検出部50とを含む。光学式位置検出装置は、X−Y平面に直交するZ軸での対象物OBのZ座標位置に応じて、対象物OBの位置情報の検出精度を異ならせる。
(もっと読む)
計測装置
【課題】被検物の温度管理を行って高精度の形状測定が行える計測装置を提供すること。
【解決手段】被検物の形状を測定する計測装置であって、
前記被検物の形状情報を採取する検出手段と、
少なくとも前記検出手段の汚染を防止する気体流を形成する汚染防止気体流形成手段と、
前記被検物の温度を計測する温度計測手段と、
前記被検物の温度を調整する気体流を形成する気体流形成手段と、
前記温度計測手段からの情報に基づいて、前記気体流形成手段を制御して、前記被検物の温度を所定温度範囲に保持する温度制御手段と、を備える。
(もっと読む)
情報処理装置、プログラム、および情報処理システム
【課題】三次元形状の測定精度の悪化を抑制する。
【解決手段】対象物への検出光の投光と撮像との第1の投光撮像条件において対象物の所定部分の撮像結果から特定される第1座標データと、第2の投光撮像条件において該所定部分の撮像結果から特定される第2座標データとを取得する取得手段と、第1座標データと、第2座標データとの空間配置関係の一致度に基づいて、第1座標データの各座標が、該所定部分の実際の三次元形状を表現した実座標であるか、該実座標以外の非実座標であるかを判別する判別手段とを備える。第1座標データと、第2座標データとは、第1の投光撮像条件と第2の投光撮像条件との既知の幾何学的な関係に基づいて所定の三次元座標系で表現されており、空間配置関係の一致度は、第1候補座標と、第2候補座標とについての空間配置関係によって算出される。
(もっと読む)
計測装置
【課題】被検物の温度管理を行って高精度の形状測定が行える計測装置を提供すること。
【解決手段】被検物の形状を測定する計測装置であって、前記被検物の形状情報を採取する検出手段と、前記被検物の温度を計測する温度計測手段と、前記被検物の温度を調整する気体流を形成する気体流形成手段と、前記温度計測手段からの情報に基づいて、前記気体流形成手段を制御して、前記被検物の温度を所定温度範囲に保持する温度制御手段と、を備える。
(もっと読む)
3次元形状測定装置、3次元形状測定付加装置および3次元形状測定方法
【課題】照明光の連続性を確保し、被測定物の視認性や人の作業効率に影響を与えることなく、高精度かつ確実に被測定物の3次元形状を導出する。
【解決手段】3次元形状測定装置110は、被測定物102に特定色の光を投射する投光源150と、被測定物で反射された反射光のうち特定色の反射光を受光し投影像を形成する受光素子160と、2値化された制御信号を生成する信号生成部170と、被測定物に照明光を照射する複数の照明装置120a、120b、120cのうち特定色を含む照明光を照射する照明装置120aを、制御信号が第1状態を示す間消灯する照明制御部162と、制御信号が第1状態を示す間に、受光素子に投影像を形成させる投影像形成制御部172と、受光素子で形成された投影像に基づいて被測定物の3次元形状を導出する3次元形状導出部176とを備える。
(もっと読む)
位置検出装置
【課題】 より少ない部品数でより高い検出精度を実現可能な位置検出装置を提供する。
【解決手段】 位置検出装置A1は、x方向に延びる読み取り領域を有し、上記読み取り領域において受光した光量に応じて信号を出力する受光手段4Aと、x方向と直交するy方向において検出基準面1を挟んで受光手段4Aと対向するように設置されており、上記x方向において上記読み取り領域の幅よりも長い領域を照明する帯状光束をy方向に向けて出射する光学ユニット3Aと、光学ユニット3Aに光を供給する光源手段21,22と、を備えており、受光手段4Aが出力する信号の値の偏りから検出基準面1に近接する検出対象物のx方向における位置を検出する。
(もっと読む)
情報処理システムおよびプログラム
【課題】対象物の外縁と回転保持台の回転軸との距離が三次元測定機の測定可能範囲の長さよりも長い場合であっても回転軸の位置および姿勢の情報を取得する。
【解決手段】情報処理システムは、対象物の三次元形状を測定する三次元測定機と、所定の特徴部と、保持基準部とを備えた校正用対象物と、校正用対象物を保持する回転保持手段と、三次元測定機に対する回転保持手段の回転軸の位置および姿勢の情報である回転軸情報を取得する回転軸情報取得手段と、を備える。そして、保持基準部は、特徴部に対する回転軸の位置および姿勢が既知の配置関係に保持されるための基準であり、回転軸情報取得手段は、保持基準部によって回転保持手段に保持された校正用対象物の特徴部を三次元測定機が測定して得た測定情報を、前記既知の配置関係に基づいて変換することにより回転軸情報を取得する。
(もっと読む)
麺測定器
【目的】種々の麺類の太さを麺に対して非接触状態で計測することができ、且つ麺の太さが合格基準範囲内に収まっているか否かを瞬時に判定することができる麺測定器を提供すること。
【構成】 サンプル麺Mの長さ方向の一端を挟持固定する上部クランプAと、前記麺の他端を挟持固定する下部クランプBと、前記上部クランプAと前記下部クランプBとを結ぶ仮想線Lvに対して交差する光を発するセンサ8と、該センサ8よる麺の太さを数値表示する表示部83とからなること。前記上部クランプAと前記下部クランプBは水平面を同一角度回動自在とすること。
(もっと読む)
三次元形状計測装置、キャリブレーション方法、およびロボット
【課題】三次元形状計測における高さ方向のキャリブレーションを効率的に且つ高精度に行う。
【解決手段】階段形状のキャリブレーション用ブロックと、これが載置される載置台40を移動させる載置台駆動部30と、撮像画像から光切断線を検出する光切断線検出部22と、光切断線から特徴点を検出して特徴点座標値を計算し、この特徴点座標値と載置台40の移動ピッチとキャリブレーション用ブロックの所定の属性データとを関連付けた特徴点情報を生成する反射位置計算部23と、特徴点座標値と移動ピッチとから世界座標系における特徴点の三次元座標値に変換する変換行列を計算する変換行列計算部24と、特徴点情報と変換行列とに基づいて、撮像画像の画像平面の二次元座標値とこれに対応する世界座標系の三次元座標値との組み合わせを求めて校正用データを生成する三次元座標変換部25とを備えた。
(もっと読む)
161 - 180 / 915
[ Back to top ]