
Fターム[2F065HH05]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 強度分布 (4,196) | スリット光;帯状光 (915)
Fターム[2F065HH05]に分類される特許
81 - 100 / 915
トロリ線測定方法及び装置
【課題】トロリ線以外の構造物の影響を無くしトロリ線の偏位量を正確に測定する。
【解決手段】トロリ線測定装置は、トロリ線に向けて光を投光し、その反射光を受光することによってトロリ線の外形を測定する。このトロリ線の外形を測定する際に、剛体電車線区間では剛体部やイヤー部からのノイズが多く正確に測定することが困難である。そこで、このトロリ線測定装置は、剛体電車線区間でトロリ線及びその近傍の電車線設備(剛体部及びイヤー部)の画像を撮影し、撮影された画像に基づいて電車線設備の偏位を測定し、その測定結果をトロリ線の外形の測定に反映させるようにした。
(もっと読む)
計測装置、欠陥検査装置及び計測方法

【課題】全体形状と局所的形状とを両方とも精度良く計測する。
【解決手段】プロジェクタ1は物体M上に映像を投影する。撮像装置2はプロジェクタ1によって物体M上に投影された映像を、プロジェクタ1とは異なる角度から撮像する。ステージ3及びステージ駆動装置4は、物体Mとプロジェクタ1及び撮像装置2との間の所定方向の相対走査を実行する。記憶部6には、ステージ3及びステージ駆動装置4による相対走査を実行しつつ、プロジェクタ1によりY軸方向に延びるスリット像を基準となる物体M上に投影させたときに撮像装置2によって撮像される動画像も記憶されている。制御部9は、ステージ3及びステージ駆動装置4による相対走査を実行しつつプロジェクタ1により記憶部6に記憶された動画像を計測対象の物体M上に投影させるとともに、撮像装置2により物体M上に投影された動画像を撮像させる。
(もっと読む)
対象物の認識システム、見守りシステム、監視システム
【課題】エネルギ照射装置と2次元撮像装置を用いることで、種々の条件下で頑健に動作する対象物認識システムおよび見守りシステム、監視システムを提供する。
【解決手段】観測対象となる空間に向けて、所定の位置から照射方向を変えながら、エネルギを照射する照射手段と、照射手段で照射されたエネルギの反射エネルギを2次元的に感知し、対象となる空間を2次元的に撮像する撮像手段と、撮像手段で撮像した撮像画像上の切断曲線の特徴を用いて対象物の認識を行う認識手段とを備える対象物認識システムおよび該システムを備える見守りシステム、監視システム。
(もっと読む)
パターン光投影装置及び方法
【課題】振動ミラーにより光ビームを走査することで対象物上に光のパターンを投影する三次元形状計測装置において、投影する光のパターンの環境条件等による変化を補償する。
【解決手段】MEMSミラー14で走査されるスリット光が実効的な走査範囲のA端を通るタイミングを光ファイバ20A及び光検出器36Aにより検出する。時間間隔計測部38は、往復走査されるスリット光がA端を通過するタイミング同士の時間間隔を計測する。走査角度判定部40は、計測された時間間隔に対応する走査角度変化パターンを求め、そのパターンからレーザー駆動信号の位相に対応する走査角度を求める。変調パターン信号生成部42は、求められた走査角度に対応するレーザー発光強度を投影パターンから求める。レーザー駆動回路32は、求められたレーザー発光強度に従って、レーザー10の発光を制御する。
(もっと読む)
ムラ検査用画像取得装置およびムラ検査装置並びに照射部の位置決定方法
【課題】照射部の発光ムラがムラ検査用画像に与える影響を抑制する。
【解決手段】ムラ検査用画像取得装置11は、基板9が載置されるステージ2、基板9の検査表面91に向けて照明光を照射する照射部3、検査表面91にて反射した照明光を受光する撮像部41を備える。撮像部41は、ラインセンサ411および撮像光学系412を備える。ラインセンサ411の各受光素子には、ムラ検査に必要な強度の光が入射する。撮像光学系412は、物体側において非テレセントリックであり、ラインセンサ411の位置と光学的に共役な合焦位置は、検査表面91から撮像部41側にずれて位置する。ムラ検査用画像取得装置11では、照射部3と検査表面91との間の光軸J1に沿う方向における距離が100mm以上である。これにより、照射部3の発光ムラがムラ検査用画像に与える影響を抑制することができる。
(もっと読む)
平坦度検出装置、および平坦度検出方法
【課題】簡単な構成で容易に平坦度を検出可能な平坦度検出装置、および平坦度検出方法を提供する。
【解決手段】平坦度検出装置1は、三次元測定装置2から計測データを取得する計測データ取得手段141と、検査対象計測面上の第一計測点を取得する第一計測点取得手段143と、第一計測点から検査対象計測面の幾何形状式を算出する第一形状算出手段144と、計測データから隣接計測面に属する第二計測点を取得する第二計測点取得手段145と、第二計測点から隣接計測面の幾何形状式を算出する第二形状算出手段146と、検査対象計測面および隣接計測面の交線または交点を算出する外周縁算出手段147と、交線または交点に基づいて補正検査対象計測面の幾何形状式を算出する補正計測面算出手段148と、補正検査対象計測面の幾何形状式に基づいて検査対象面の平坦度を検出する平坦度検出手段149と、を具備した。
(もっと読む)
被計測体の表面異常識別装置
【課題】高温の被計測体に発生する酸化スケール等の表面異常を精度良く識別することができる被計測体の表面異常識別装置を提供する。
【解決手段】高温の被計測体5から得られる輻射光を輻射光撮像部18により、被計測体5が一定角度回転される毎に撮像して得た複数の輻射光画像を合成して、合成輻射光画像を作成する画像合成部10と、前記合成輻射光画像から所定領域を抽出して、撮像中の被計測体5の温度低下に基づく前記所定領域の画像の輝度変化を補正する第1輝度補正部12と、前記補正した所定領域の画像から所定暗部を検出し、該所定領域の画像の暗部を前記被計測体の表面異常と判定する異常判定部14と、を備える被計測体の表面異常識別装置1を用いる。
(もっと読む)
タイヤ形状検査装置、及びタイヤ形状検査方法
【課題】ショルダ部を含めてタイヤの表面形状を検出することができるようにする。
【解決手段】タイヤ形状検査装置は、タイヤのトレッド部8に対してライン光を照射する第1ライン光照射手段10と、タイヤのサイドウォール部7に対してライン光を照射する第2ライン光照射手段12と、タイヤのショルダ部9から当該ショルダ部9を超えた領域までライン光を照射する第3ライン光照射手段13と、第1ライン光照射手段10、第2照射手段及び第3ライン光照射手段13が照射してタイヤ表面で反射したライン光を撮像する撮像手段16とを備える。
(もっと読む)
しわ発生判別方法、プログラム、速度計測装置、形状計測装置、しわ発生判別装置及び画像形成装置
【課題】幅広いシート材種に対してシート材のしわ発生の余裕度を評価し、しわの発生を予防する技術を提供する。
【解決手段】波打ち形状算出手段が、ニップ部におけるシート材の搬送方向と直行する方向の搬送速度分布を記憶手段から読み出して(S1)、搬送速度分布からシート材の波打ち形状を算出し(S2)、しわ発生判別手段が、波打ち形状算出手段により算出された波打ち形状に基づいてシート材にしわが発生するか否かを判断する(S3、S6、S7)。
(もっと読む)
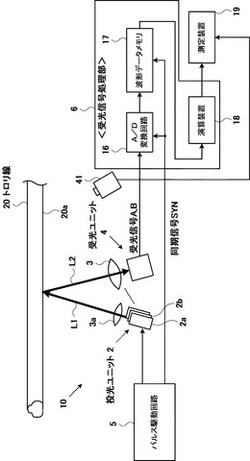
形状測定装置の校正方法、形状測定装置、校正用ターゲット
【課題】光断面式により形状を測定する形状測定装置の校正を、校正用ターゲットを頻繁に移動させることなく行うことのできる形状測定装置の校正方法、形状測定装置及び校正用ターゲットを提供する。
【解決手段】底面形状及び寸法が既知である柱体の校正用ターゲット20に、校正用ターゲット20の底面形状における複数の特徴点に対応し、該底面と平行に配置された複数の発光点を含む少なくとも3組の発光体群21〜23を、校正用ターゲット20の柱体高さ方向の位置が異なり、且つそれぞれの前記特徴点と該特徴点に対応する前記発光点各々とが同一直線上に位置するように並設し、発光体各々及びラインレーザの撮像画像と射影変換で複比が不変であることとに基づいて校正用ターゲット20の特徴点の位置座標を同定し、装置校正を行う。
(もっと読む)
溶接形状評価装置及びその評価方法
【課題】船舶、橋梁、配管などに用いられている様々な溶接形状を計測し、実際の溶接形状に即した溶接の形状パラメータを算出し、自動的に溶接部の疲労強度を算出する溶接形状評価装置及び方法を提供する。
【解決手段】溶接形状評価装置1が照射部13からレーザーを照射し、溶接部を複数の2次元座標(直交座標又は極座標)を持った計測点で計測する計測装置10と、前記計測点を用いて疲労強度を算出する演算装置20とからなり、溶接形状評価方法が座標から計算式により溶接の形状パラメータを算出して簡易式により応力集中係数を算出する簡易式工程と、有限要素法(FEM)を用いて溶接部を解析して応力集中係数を算出する有限要素法(FEM)工程とを備えた応力集中係数算出工程と、複数の提案式と方法を備えて疲労強度を算出する疲労強度算出工程とを備える。
(もっと読む)
校正用治具および光切断式形状計測装置の校正方法
【課題】光切断式形状計測装置および校正用治具を静止させた状態で、撮像手段の内部パラメーターおよび撮像手段とスリット光との相対位置を校正する。
【解決手段】光切断式形状計測装置の校正に用いる校正用治具1において、互いに平行かつ高低差が既知である参照面1a、1b、1c、1dを複数有する校正用治具1本体と、参照面1a、1b、1c、1dに設けられた参照面内における位置が既知である複数の参照孔2と、複数の参照孔2から光を射出する光源とを備える。
(もっと読む)
三次元形状計測装置、および三次元形状計測方法
【課題】正確に半田の高さを算出することができる三次元形状計測装置を提供することである。
【解決手段】半田塗布前の検査ブロックにおいて、配線パターンの近似面を作成する(S22)。また、半田塗布前の検査ブロックにおいて、ランドの近似面を作成する(S23)。そして、作成した配線パターンの近似面Srとランドの近似面Slとに基づいて、オフセット、すなわち、配線パターンの近似面Srとランドの近似面Slとの距離を算出する(S24)。そして、算出したオフセットをRAM等に記録する(S25)。そして、半田塗布後に、記憶したオフセットを読み出して、半田の高さを計算する。
(もっと読む)
形状測定方法
【課題】形状測定装置自体の振動や蛇行の影響を受けずに測定対象の形状を正確に測定すること。
【解決手段】高さ方向に関する測定対象の形状を左右同時に測定する測定ステップ(STP1)と、測定対象の右側及び左側の面全体を走査する走査ステップ(STP2)と、測定対象の右側測定データと左側測定データとから、それぞれ独立に短周期成分を除去する振動除去ステップ(STP3)と、短周期成分を除去した右側測定データと左側測定データとの両方を用いて長周期成分を除去する蛇行除去ステップ(STP4)とを含む。
(もっと読む)
形状測定装置およびこれに用いる光学フィルタ
【課題】装置構造を大型化することなく、光切断法によって至近距離から大型な被測定物の形状を精度よく測定できること。
【解決手段】本発明の一態様である形状測定装置1は、被測定物15にスリット光L1を照射し、フィルタ3およびレンズ4を介して被測定物15からのスリット光L1を撮像して、被測定物15の形状を測定する。フィルタ3は、レンズ4の物体側主点4aを中心として被測定物15側に凸な弧形状をなし、スリット光L1を透過するとともにスリット光L1以外を遮光する。
(もっと読む)
ワイヤーボンドの三次元位置決め方法及び装置
【課題】微小径ワイヤーボンドの接合状態の良否検査に先立ち、当該ワイヤーボンドの三次元的位置決めを迅速且つ精確に行うことができるワイヤーボンドの三次元位置決め方法及び装置を提供することを課題とする。
【解決手段】カメラ5とラインレーザー3、4を用いて、可動ステージ2上に載置されたワイヤーボンド1の三次元位置決めを行うための方法であって、 ラインレーザー3、4を、カメラ5の向きに対して角度を持たせて配置することにより、照射されたレーザーラインがワイヤーボンド照射部分において他の照射部分と一直線状にならないようにし、カメラ5で取り込んだレーザーラインが照射された状態のワイヤーボンド1の画像データにおいて、ワイヤーボンド1上におけるレーザーラインの位置と基準位置とのずれとラインレーザーの傾斜角度とから演算して求めた数値を基に、可動ステージ2を移動制御する
(もっと読む)
検査装置及び欠陥検査方法
【課題】炭化珪素基板又は炭化珪素基板に形成されたエピタキシャル層に存在する欠陥を検出し、検出された欠陥を分類する検査装置を実現する。
【解決手段】本発明では、微分干渉光学系を含む走査装置を用いて、炭化珪素基板の表面又はエピタキシャル層の表面を走査する。炭化珪素基板からの反射光はリニアイメージセンサ(23)により受光され、その出力信号は信号処理装置(11)に供給する。信号処理装置は、炭化珪素基板表面の微分干渉画像を形成する2次元画像生成手段(32)を有する。基板表面の微分干渉画像は欠陥検出手段(34)に供給されて欠陥が検出される。検出された欠陥の画像は、欠陥分類手段(36)に供給され、欠陥画像の形状及び輝度分布に基づいて欠陥が分類される。欠陥分類手段は、特有の形状を有する欠陥像を識別する第1の分類手段(50)と、点状の低輝度欠陥像や明暗輝度の欠陥像を識別する第2の分類手段(51)とを有する。
(もっと読む)
3次元計測装置、および3次元計測方法
【課題】投影装置の温度ドリフトによる影響を軽減する3次元計測装置、および3次元計測方法を提供することを目的としている。
【解決手段】所定の照射パターンの光を照射する投光部30と、投光部により照射された光による反射光を含む像を撮像する撮像部20とを有する3次元計測装置1であって、投光部に対して照射パターンの光の照射位置を制御する照射指示を出力し、撮像部が撮像した画像データから計測データを算出する計測部40を備え、計測部は、投光部に照射パターンの光を照射し続けさせ、撮像部により撮像される領域を含む計測領域内で走査を繰り返すように制御し、照射指示による照射位置を撮像された画像データから検出し、検出した異なる時刻且つ同一位置への照射指示による照射位置を示す情報同士を比較して、計測値の校正のための校正データを補正する。
(もっと読む)
位置検出装置
【課題】パネル上に穴加工の基準となる目標点の座標を短時間で検出することが可能な位置検出装置を提供する。
【解決手段】本発明に係る位置検出装置1は、被測定面と交差する方向の高さを有する基準ボルトBの頭部Btに直線光を照射し、その反射光から基準ボルトBの頭部Btまでの距離を測定する光学センサ2と、直線光を照射方向と交差する2つの方向へ移動させる回転支軸3と、光学センサ2により所定の値の距離が測定された時点の回転支軸3の移動位置を検出する位置センサと、この位置センサから得られた複数の位置データから2つの移動方向により規定される平面において、基準ボルトBの略中心にあるボルト穴Pbの中心の座標を演算する演算部と、を有するものである。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
81 - 100 / 915
[ Back to top ]