
Fターム[2F065HH05]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 強度分布 (4,196) | スリット光;帯状光 (915)
Fターム[2F065HH05]に分類される特許
101 - 120 / 915
印刷半田検査装置
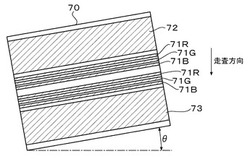
【課題】半田の撮像画像の欠落を無くすことが可能な印刷半田検査装置を提供することにある。
【解決手段】印刷半田検査装置の撮像素子70は、走査方向の垂線に対してなす角θが0度を超え90度未満となるように傾けられ、その撮像領域の長手方向とスリット照明の長手方向が平行となるように照射し走査したとき、そのときの角度を存在率の低いもしくは存在しない長方形や楕円形等の前記半田の回転角度に設定されている。これにより、照射光の長手方向中心軸と、半田の短手方向中心軸を平行にならないようにし、明るさが落ち込む場所が非常に長くなる現象の発生を防ぎ、また、サチュレーション部の欠落画像の補間を可能となる。
(もっと読む)
錠剤の外観検査装置及びPTP包装機

【課題】 錠剤の振動やポケット内の姿勢に影響を受けることなく正確な検査が行えるようにすること
【解決手段】 3Dカメラ装置は、容器フィルムのポケット部内に供給された錠剤を撮像し、三次元計測法により錠剤の表面の各位置の高さ位置を濃淡画像で表したプロファイル画像を求め、処理装置22に送る。処理装置は、プロファイル画像に基づき錠剤の外観検査を行うもので、プロファイル画像中の錠剤を示す画像データを抽出する錠剤検出部31と、抽出した画像データをその錠剤の表面が平坦になるように補正処理をして平坦化画像を生成する平坦化処理部32と、その平坦化画像に基づいて外観異常の判定を行う欠陥解析部34を備える。平坦化処理部32により錠剤の表面の高さ位置が平坦(水平)に正規化されるので、簡単な閾値処理で異常の有無を判定できる。
(もっと読む)
溶接ビード切削幅測定方法
【課題】切削部の境界が明確に検出できる溶接ビード切削幅測定方法を提供する。
【解決手段】溶接ビード切削部11を照明装置で照射し、照射された領域をカメラ3で撮影し、その撮影画像を画像処理装置4で処理して溶接ビード切削幅を測定する溶接ビード切削幅測定方法において、前記照明装置として、溶接ビード切削部に対し左側から照射する左側照明装置1と右側から照射する右側照明装置2との2つを用い、左側からの照射と右側からの照射を交互に行う。
(もっと読む)
欠陥検出装置及び欠陥検出方法
【課題】管状体の内表面に発生しうる凹凸疵及び模様系の疵を同時に検出すること。
【解決手段】本発明に係る欠陥検出装置は、管状体の軸方向に沿って移動しながら管状体の内表面に対して環状のレーザ光を照射して環状ビーム画像を複数生成する管状体撮像装置と、生成された環状ビーム画像に対して画像処理を行い、管状体の内表面に欠陥が存在するかを判断する演算処理装置とを備え、演算処理装置は、各環状ビーム画像における環状のレーザ光の照射部分の重心位置を算出する環状ビームセンター算出部と、環状ビーム画像の座標系を変換して光切断画像を複数生成する座標変換部と、各光切断画像から生成された縞画像フレームに基づき管状体の内表面の凹凸状態を表す深さ画像及び管状体の内表面でのレーザ光の輝度分布を表す輝度画像を算出する画像算出部と、算出された深さ画像及び輝度画像に基づき内表面に存在する欠陥を検出する欠陥検出部とを有する。
(もっと読む)
位置姿勢測定装置および3次元形状測定装置
【課題】3次元形状測定装置の撮像装置や接触子のように、3次元形状の測定に必要であり、かつ、その位置や姿勢が測定データに大きく影響する器具等の位置や姿勢を正確かつ簡便に測定できるようにする。
【解決手段】位置姿勢測定装置は、例えば、互いに直角をなす線状の第1、第2の像19A、19Bをそれぞれ結ぶレーザー光を利用するものであり、第1、第2の像19A、19Bと交差することで、レーザー光を反射して特定の方向に向かわせる反射具11を備える。また、反射具11は、再帰性反射材により設けられた3つの反射部23a〜23cを有し、反射部23a〜23cは、3角形の頂点を占めるように、かつ、反射されるレーザー光の光量が互いに異なるように設けられている。これにより、球面座標系を利用して撮像装置等の位置および姿勢を正確に測定することができる。
(もっと読む)
シャフトの変形を測定するための装置及び方法
【課題】 シャフトの変形を測定するための装置及び方法を提供する。
【解決手段】 デバイスによってシャフト2の変形を測定するための方法が、変形が加えられる前に、シャフト2に付加されたパターン3を照明するステップと、パターン3によって反射された放射線を検出することによって第1基準位置を検出するステップとから成り、変形が加えられた後に、パターン3を照明するステップと、パターン3によって反射された放射線を検出することによって第2基準位置を検出するステップとから成る。これにより、第1基準位置と第2基準位置との間の距離に基づいて、シャフトの円周方向の変形及び/又はトルクが求められる。
(もっと読む)
三次元形状計測装置
【課題】段差部毎に撮像部を設置しなくても、各段差部の三次元形状を精度良く計測する。
【解決手段】受光素子21Pは、サンプルSPからの反射光を受光する。レンズ22Lは、中心線側の段差部WA1からの反射光(光軸がR1)を結像して受光素子21Pに導く。また、レンズ22Lは、段差部WA1よりも外側の段差部WA2からの反射光(光軸がR2)を、ミラー231,232を介して結像して受光素子21Pに導く。撮像部21の光軸LAは、段差部WA1からの反射光の光軸R1の受光素子21Pまでの光学距離と、段差部WA2からの反射光の光軸R2の受光素子21Pまでの光学距離とが等しくなるように、サンプルSPに対する仰角及び方位角が設定されている。
(もっと読む)
共焦点顕微鏡システム、画像処理方法および画像処理プログラム
【課題】観察対象物の表面の断面曲線を正確でかつ高速に検出することが可能な共焦点顕微鏡システム、画像処理方法および画像処理プログラムを提供する。
【解決手段】使用者が観察対象物Sの断面曲線データの取得範囲を指示する。CPU210は、その指示に基づいてX方向に沿って連続的に並ぶ複数の帯状領域を設定するとともに、各帯状領域においてX方向に平行な複数の測定ライン上でレーザ光を走査することにより、複数の測定ラインに基づく画素データを制御部300から取得する。CPU210は、取得した複数の測定ラインの画素データに基づいて帯状領域の複数の断面曲線データを生成し、作業用メモリ230に記憶する。CPU210は、複数の帯状領域の複数の測定ラインについて生成された断面曲線データをX方向に沿って連続する測定ラインごとに連結することにより、連結された複数の断面曲線データを得る。
(もっと読む)
炉壁形状測定装置、炉壁形状測定システム、および炉壁形状測定方法
【課題】炉壁表面の凹凸形状を測定するためのレーザ光と炉壁の自発光とを同時に取得しつつもレーザ光と自発光とが干渉せず、炉壁表面に対し垂直方向の計測可能範囲およびレーザ光の照射範囲を広くする。
【解決手段】スリット状の窓2を有する断熱性保護箱3の内部に配置された、スリット状のレーザ光を射出するスリットレーザ光源4と、レーザ光を反射して窓2を介して炉壁表面へレーザ光を照射するレーザ光用ミラー5と、窓2を介して断熱性保護箱3の内部に入射する、レーザ光の照射による炉壁表面の反射光および炉壁表面が発する自発光を反射する撮像用ミラー6と、撮像用ミラー6から反射された自発光と反射光とを光学フィルタ7を介して撮像する撮像装置8とを備える。
(もっと読む)
三次元計測装置
【課題】計測精度に優れた三次元計測装置を提供すること。
【解決手段】対象物の三次元形状を計測する三次元計測装置であって、対象物へ向けて計測光を射出する光射出部と、計測光を発光する光源を有し、計測光を光射出部に供給する光供給部と、光源と光射出部とを相対移動させる移動部と、計測光が照射された対象物を撮像する撮像部と、撮像部による撮像結果及び移動部による移動結果に基づいて、対象物の三次元形状を求める演算部とを備える。
(もっと読む)
ワーク寸法測定装置
【課題】円形ワーク等を含む種々のワークの形状を短時間で簡易かつ正確に測定できるワーク寸法測定装置を提供する。
【解決手段】ワークWを挟んで両側に位置させられ、ワークWに向けて一定長の線状レーザ光Lを照射する一対のレーザ変位計4A,4Bと、これらレーザ変位計4A,4Bを互いに対向する方向で離間ないし接近方向へ移動させるスライダ機構2A,2Bと、ワークWに照射された線状レーザ光LがワークWの表面に線像を生じさせた際の移動距離に基づいてワークWの外形寸法を算出するパソコン6とを備える。ワークWは円形であり、その外周面に生じる線像は頂点を有する円弧状をなし、パソコン6は上記移動距離と頂点の位置に基づいてワークWの外径を算出する。
(もっと読む)
3次元座標計測装置
【課題】精度良くセンサ座標系を世界座標系に変換する。
【解決手段】基準プレート50を世界座標系でキャリブレーションされた3次元絶対座標計測器60で計測して、世界座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。また、3次元座標計測ロボット10の3次元センサ部8を指令値に応じた位置に移動させ、基準プレート50にスリット光を投射して撮像し、撮像した画像からセンサ座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。世界座標系及びセンサ座標系の各々における基準点の3次元座標、法線ベクトル、及びエッジベクトルを用いて、センサ座標系を世界座標系に変換する変換パラメータを、指令値毎に算出する。
(もっと読む)
蒸気発生器の隙間計測装置
【課題】伝熱管と伝熱管振れ止め金具の隙間を精度よく計測することができる蒸気発生器の隙間計測装置を提供することにある。
【解決手段】蒸気発生器の内筒内に配設される多数本の伝熱管と、隣接する伝熱管の間に配置される伝熱管振れ止め金具の隙間を計測する蒸気発生器の隙間計測装置10であって、光を出射する発光器14と、発光器14から出射された光を受光し光量を計測する受光器15と、発光器14および受光器15がそれぞれ先端部に取り付けられ所定の長さを有す一対の支持棒11,12と、発光器14と受光器15が対向して配置され、一対の支持棒11,12の基端部に連結して設けられた連結材13とを具備するようにした。
(もっと読む)
三次元形状測定装置
【課題】被検物の一部に単位距離あたりの形状変化が大きい部分があっても、データ取得時間を短くする。
【解決手段】検査光を被検物に照射する照射部21と、検査光と被検物とを相対移動させる移動部と、検査光が照射された被検物を撮像し、撮像結果を出力する撮像部22と、撮像部22の撮像結果に基づいて、前記被検物の三次元形状を前記相対移動の方向に間隔をおいて演算する座標算出部53と、被検物の形状に応じて前記間隔を変更する制御部41と、を備える。
(もっと読む)
画像処理装置、画像処理装置の制御方法、距離計測装置、およびプログラム
【課題】パターン投影と簡便な画像処理で多重反射光領域の検出を行うことにより、多重反射によるノイズの影響を低減することを目的とする。
【解決手段】投影部によりエピポーララインと略平行な方向のラインパターンが投影された撮像対象物を撮像する撮像部と、撮像された画像からラインの方向を算出するライン方向算出部と、ラインの方向と、投影部と撮像部との相対的な位置関係を示す幾何配置に基づいて決定されるエピポーラライン方向との角度差に基づいて多重反射光領域を検出する検出部と、を備える。
(もっと読む)
物流システムにおける自動計測装置
【課題】大量の輸送貨物量の発生する現代社会および今後において、物流の自動化、システム化はますます重要になっている。物流システムの効率化、コストダウンにおいて形状、寸法、重量、温度、色、模様などの物性、個別認識情報の一括計測、情報管理が自動化、システム化の要件であるが高速、軽量簡便な計測センサーを実現させ合理化を進める。
【解決手段】形状寸法計測センサーとしてCCDカメラ120〜122を利用し、重量計109その他のセンサー、装置を併用して形状、寸法、物性、個別管理情報の一括計測を可能にし、物流の自動化システム化を計る。
(もっと読む)
計測装置
【課題】簡単な構成で、試料を加熱しつつ正確に計測することが可能な計測装置を提供する。
【解決手段】計測装置は、試料Aを保持する位置または試料Aに対向する位置に配置され、透明基板121と透明基板121の表面に設けられた透明導電膜122を有する透明部材12と、試料Aを撮影する光検出部22と、透明部材12の透明導電膜122に印加する電圧を制御することにより、透明部材12の温度を制御する熱制御部42とを備える。
(もっと読む)
三次元表面の計測装置及び方法
【課題】光学的フーリエ変換を採用し、CMP用研磨パッドの複雑な表面形状を実時間でそのまま定量的に評価可能にする。
【解決手段】評価すべき三次元の微小凹凸面の上に溶液を介して溶液層定常化基板を載置する。レーザ照射部は、溶液層定常化基板を通して単一波長光のレーザ光を微小凹凸面に照射する。微小凹凸面から散乱及び回折した光を光学的にフーリエ変換したフーリエ変換像をフーリエ変換像取得部で取得する。このフーリエ変換像を、信号変換器により光強度分布として電気信号に光電変換する。この取得した光強度分布の波形を、基本波数及び少なくとも一つの高調波数に分解したそれぞれの波長とその振幅をスペクトル情報として抽出して、三次元の微小凹凸面の形状を評価する。
(もっと読む)
テクスチャ評価装置、テクスチャ評価方法
【課題】対象物の表面において多数の凹凸が繰り返し形成された領域全体についての評価が可能なテクスチャ評価装置、テクスチャ評価方法を提供する。
【解決手段】テクスチャ評価装置1は、3次元計測部2と、3次元計測部2から計測データを入力する入力部3と、距離画像の生成などを行う演算部4と、評価結果を表示する表示部6とを備えている。3次元計測部2は、対象物10表面までの距離を計測し、計測した距離値を計測データとして入力部3に出力する。演算部4は、3次元計測部2から入力部3に入力された距離値を用いて、距離値を画素値とする距離画像を生成する距離画像生成部41を有している。さらに、演算部4は、距離画像の全体についてのテクスチャの凹凸の形状を表す測度の分布を求め、当該分布の統計量を特徴量として算出する特徴量算出部42と、算出された特徴量に基づいてテクスチャの評価を行う評価部43とを有している。
(もっと読む)
構造化照明を用いるエッジ検出
【課題】構造化照明を用いるエッジ検出を提供する。
【解決手段】マシンビジョン検査システム(MVIS)および関連する光ストライプエッジ特徴位置方法が開示される。MVISには、制御システムと、光ストライプ投射システムと、撮像システムと、ユーザインターフェースと、が含まれる。エッジ特徴を含む関心領域において、光ストライプ投射システムは、光ストライプが、光ストライプに沿った変化するストライプ強度プロファイルを有するように、エッジ方向に対して交差するように、かつエッジ特徴を横切って光ストライプを合焦させる。撮像システムは、光ストライプの画像を取得し、制御システムは、画像を解析し、ストライプに沿った変化する光強度プロファイルに基づいて、エッジ特徴の位置を決定する。方法は、エッジ検出ビデオツールにおいて実行してもよい。方法は、例えば、高テクスチャ、斜面、溝、丸まり、または損傷があるエッジを検査するために有利になり得る。
(もっと読む)
101 - 120 / 915
[ Back to top ]