
Fターム[2F065KK02]の内容
光学的手段による測長装置 (194,290) | 観測方式 (106) | 断続 (57)
Fターム[2F065KK02]に分類される特許
1 - 20 / 57
内視鏡装置および計測方法
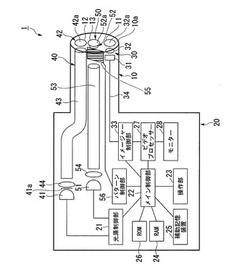
【課題】計測に適した条件であるかを短時間で判定できる内視鏡装置および計測方法を提供する。
【解決手段】本発明の内視鏡装置1は、第一光源41からの照明光の出射状態を所定の周期で変化させ、第一光源41から照明光が出射されている状態では第二光源51からの投影光の出射を停止させ、第一光源41からの照明光の出射が停止されている状態では第二光源51から投影光を出射させ、照明光により被検物が照明された明視野画像を第一光源41から照明光が出射されている状態で撮像部30に取得させ、被検物に縞パターンが投影されたパターン投影画像を投影光が出射されている状態で撮像部30に取得させ、撮像部30が取得したパターン投影画像を用いて被検物の三次元形状を計測し、パターン画像を用いた計測によって得られた情報を明視野画像とともにモニター28に表示させるメイン制御部22を備える。
(もっと読む)
自己発光型ターゲット及び変位計測システム

【課題】 屋外において昼夜に亘って連続的に変位計測が可能で計測誤差が少ない変位計測用の自己発光型ターゲット、及びそれを備えた変位計測システムを提供すること。
【解決手段】 撮像手段(カメラ3)で撮像した画像を解析手段(PC4)で解析することにより計測対象物(レール)の変位計測を行う変位計測システム1に用いられ、計測対象物(レール)に取り付けられて自ら発光する変位計測用の自己発光型ターゲット(計測用ターゲット2)を、ケース20と、このケース20の背面側内部に取り付けられて発光する発光手段21と、ケース20の前面側内部に取り付けられ、蓄光性蛍光体と光透過性物質とを含有して板状に成型された蓄光面材22と、を備えた内照式の自己発光型ターゲットとする。
(もっと読む)
三次元形状測定装置
【課題】被検物の一部に単位距離あたりの形状変化が大きい部分があっても、データ取得時間を短くする。
【解決手段】検査光を被検物に照射する照射部21と、検査光と被検物とを相対移動させる移動部と、検査光が照射された被検物を撮像し、撮像結果を出力する撮像部22と、撮像部22の撮像結果に基づいて、前記被検物の三次元形状を前記相対移動の方向に間隔をおいて演算する座標算出部53と、被検物の形状に応じて前記間隔を変更する制御部41と、を備える。
(もっと読む)
画像計測装置、画像計測方法及びコンピュータプログラム
【課題】注目点の選定や注目点を追尾することが困難な複雑な形状の計測対象物であっても、また時間の経過とともに移動する計測対象物であっても、正確なキャリブレーションを実行することができ、所望の物理量を正確に計測することができる画像計測装置、画像計測方法、及びコンピュータプログラムを提供する。
【解決手段】フレーム画像をコマ送り再生表示し、コマ送り再生表示されたフレーム画像から、複数のフレーム画像の選択を受け付ける。選択を受け付けたフレーム画像を重ね合わせた合成画像を生成する。生成した合成画像を表示し、表示した合成画像上で所定の物理量を計測する。また、寸法が既知である球を計測対象物と同一の動画像に写り込むように配置し、計測対象物と球とを撮像して取得した動画像に基づいてキャリブレーションを実行する。
(もっと読む)
ダム堤体の変位測定装置および変位測定方法
【課題】ダムの堤体に配置したワイヤの水平方向および鉛直方向の変位を検出でき、ダム堤体の変位を精度良く検出できるダム堤体の変位測定装置を提供すること。
【解決手段】ダム堤体の変位測定装置1は、堤体内部に鉛直に配置された測定ワイヤ2と、測定ワイヤ2に固定された金属球20と、金属球20を撮影する2台のカメラ21,22および照明装置23,24と、各カメラ21,22で撮影された画像を処理する画像処理装置30とを備える。カメラ21,22は、レンズの光軸が水平面内で互いに直交する位置に配置する。画像処理装置30は、撮影画像データから金属球20を認識して重心位置を検出し、その重心位置の変位によって、ダム堤体の変位を測定する。金属球20を2台のカメラ21,22で撮影して重心位置を検出しているので、金属球20の三次元方向の変位量を測定でき、ダム堤体の変位を精度良く検出できる。
(もっと読む)
反射基材の評価装置、反射基材の評価方法
【課題】 反射基材の製造工程においてインラインでも評価可能であり、簡易な方法で確実に輝度ムラの発生原因となる基材表面性状を評価することが可能な反射基材の評価装置および反射基材を提供する。
【解決手段】 レーザ変位計3により反射基材の7の表面形状情報を取得する。次に、得られた凹凸情報をフーリエ変換し、反射基材の表面凹凸形状について、周波数と強度との関係を得る。次に、算出された周波数と強度との関係と、あらかじめ設定された基準データとを比較する。所定範囲の周波数領域において、強度が0.6を超える場合には不合格判定を行い、当該判断領域において0.6を超えるデータがなければ合格判定を行う。
(もっと読む)
楕円球体の挙動解析方法
【課題】転動する楕円球体の挙動解析を可能にする。
【解決手段】本発明の楕円球体の挙動解析方法は、一対の軌道輪12,13の間で転動する楕円球体11を撮影し、その画像から当該楕円球体11の挙動を解析するものである。この方法は、楕円球体11の長軸S上に配置される第1及び第2のマーカーM1,M2を楕円球体11の表面に設け、楕円球体11の画像中に第1及び第2のマーカーM1,M2が含まれない場合に同画像中に少なくとも2つ含まれる、複数の他のマーカーM3,M4を楕円球体11の表面に設け、第1及び第2のマーカーM1,M2と、複数の他のマーカーM3,M4との相対位置についての位置情報を取得し、楕円球体11の画像中に含まれる少なくとも他の2つのマーカーM3,M4から、前記位置情報を用いて前記第1及び第2のマーカーM1,M2の位置を求めることを特徴とする。
(もっと読む)
電気機器の製造方法およびそれに用いられるターゲット設置用治具
【課題】電気機器を構成する構造物を精度良く3次元測定することにより、電気機器の組立を簡易にする。
【解決手段】構造部品の外形の寸法基準となる複数の位置にターゲットを設置する工程(S102)と、ターゲットの位置を画像解析することにより構造部品の形成寸法を3次元測定する工程(S103)とを備えている。また、構造部品の形成寸法の3次元測定結果に基づいて付設部品を形成する工程(S104)と、構造部品に付設部品を取付ける工程(S106)とを備えている。ターゲットを設置する工程(S102)は、上記複数の位置のうちターゲットを直接設置することができない設置不能箇所について、構造部品にターゲット設置用治具を取付けることにより上記設置不能箇所に対応した位置にターゲットを設置する工程を含む。
(もっと読む)
撮影経路計算装置
【課題】未知空間内のランドマークや景観の特徴によらず、ロボットの移動に伴うカメラの撮影経路を正確に算出できる撮影経路計算装置を提供する。
【解決手段】撮影点の全周囲の全方位画像を、画像座標系の横軸が方位であり、画像座標系の縦軸が撮影装置4による撮影方向に対するピッチ角である画像に変換して、当該変換後の画像の一定の方位毎にピッチ角で規定される上下方向の画素値の周波数成分を算出し、ロボット1の移動に伴って撮影装置4に撮影された各全方位画像について周波数成分を基に方位を照合することにより、全方位画像間の相対方位を推定して、推定された全方位画像間の相対方位に基づいて、ロボット1の移動に伴う撮影装置4の撮影経路を算出する。
(もっと読む)
光学式位置検出装置及び投射型表示装置
【課題】複数の検出対象物の位置をそれぞれ検出すること。
【解決手段】光学式位置検出装置は、相互に異なる第1の波長域及び第2の波長域に光強度を備えた位置検出光L2を放出する位置検出用光源部140と、第1の波長域の反射率が第2の波長域より高い反射特性を備えた第1検出対象物310と、第2の波長域の反射率が第1の波長域より高い反射特性を備えた第2検出対象物320と、第1の波長域の検出感度が前記第2の波長域より高い感度特性を備え第1の光検出信号を出力する第1光検出部410と、第2の波長域の検出感度が前記第1の波長域より高い感度特性を備え第2の光検出信号を出力する第2光検出部420と、位置検出用光源140を制御して光強度分布を形成するとともに、第1の光検出信号に基づいて第1検出対象物310の位置を検出し、第2の光検出信号に基づいて第2検出対象物320の位置を検出する位置検出部400と、を具備する。
(もっと読む)
物品撮影方法および物品撮影装置
【課題】多列、かつ、ランダムな状態で搬送される多数の容器を、カメラで撮影しカウントすることにより、容器の数を正確に把握する。
【解決手段】撮影コンベヤ上に2台のカメラを設置し、搬送されている容器を撮影する。撮影された画像は制御装置16の画像処理部18に送られて二値化処理されキャップの中心座標を算出されて記憶部20に記憶される。容器がキャップの径の大きさだけ移動する前に、制御装置16の指令部22からの指示により次の画像を撮影する。この画像のキャップも中央座標を算出され、記憶部に記憶されている前回の座標データと比較され、移動位置認識部28で容器の移動位置が認識される。キャップのサイズ分だけ移動する前に次の撮影を行うので、同じ容器の新旧の情報を確実にリンクさせることができ、撮影した画像から容器の数を正確にカウントすることができる。
(もっと読む)
エッジ検出方法及び画像処理装置
【課題】被撮像物の材質あるいは背景や周辺環境、さらには、光源の照明方向や明るさに左右されることなく被撮像物のエッジ位置を正確に検出する。
【解決手段】被撮像物IOのエッジを検出するために、制御部3は、被撮像物を実質的に半円形状で囲むように複数設けられた光源LEDを予め定められた順番で1つずつ点灯させることで、その点灯タイミングに同期して被撮像物を定点からカメラ2で撮像して当該被撮像物の濃淡画像を連続的に取得する。演算処理部4は、この点灯タイミングに同期して連続的に取得したすべての濃淡画像で、画素列毎に各画素の階調を比較して、階調の最大値となる画素と最小値となる画素との差分値を微分処理して画素列毎に微分値分布を算出し、この微分値分布から予め定められた閾値以上の画素位置をエッジ点として検出する。
(もっと読む)
三次元測定システムおよび三次元測定方法
【課題】三次元形状を測定する三次元測定の作業性を改善できる技術を提供する。
【解決手段】複数の識別点が設けられた対象物の三次元形状のうち第1領域に第1検出光および第2検出光を時間的に順次に投光する検出光投光手段と、検出光投光手段からの投光によって照明された第1領域の画像を撮影する画像撮影手段と、第1検出光が投光されたときの画像に基づいて第1領域の三次元形状を表現した三次元形状データを取得する形状取得手段と、第2検出光が投光されたときの前記画像に基づいて第1領域に設けられた複数の着目識別点のそれぞれの位置を表現した第1位置データを取得する位置取得手段と、前記第1位置データに基づいて、前記複数の着目識別点のそれぞれの位置を示す第1位置指示光を前記対象物に向けて投光する指示光投光手段を備える。
(もっと読む)
光学センサおよびそれを備えた機器
【課題】機器の周辺でこの機器を使用し又は使おうとしている人の有無を、小型かつ簡単な構成で検知でき、機器の省エネを図ることができる光学センサを提供すること。
【解決手段】1つのパッケージに、パッケージの外部の被写体を撮像して画像信号を出力するイメージセンサ部12と、イメージセンサ部12が出力する画像信号を処理する信号処理回路部13とが収容されている。信号処理回路部13は、画像信号が表す画像内に人の顔が存在するか否かを判定して、画像内に人の顔が存在すると判定したとき、実空間でのイメージセンサ部と顔との間の距離及びイメージセンサ部に対する顔の向きを検知する。
(もっと読む)
車室内状態の認識装置
【課題】シートに着座した乗員の体格をより正確に判定する。
【解決手段】本発明の車室内状態の認識装置は、車室内に赤外線を照射する赤外線照射手段15と、この赤外線照射手段15から赤外線が照射された車室内を撮像する撮像手段16と、この撮像手段16により撮像された画像に基づき所定の情報を認識する画像認識手段18とを備える。上記撮像手段16による撮像対象には、車体に対して移動可能なシート(3)と、該シートに着座した着座乗員(B)とが含まれ、上記画像認識手段18は、上記シート(3)とその着座乗員(B)との外形を画像上で比較することにより、上記着座乗員(B)の体格を判定する
(もっと読む)
位置検出システム、位置検出方法、プログラム、物体判断システム、および物体判断方法
【課題】位置検出システム、位置検出方法、プログラム、物体判断システム、および物体判断方法を提供すること。
【解決手段】電磁波発生装置と、前記電磁波発生装置から発せられる電磁波の投影面を撮像する撮像装置と、前記電磁波発生装置による電磁波の発生を制御する制御装置と、前記電磁波発生装置による電磁波の発生時に撮像された投影面の画像と電磁波の非発生時に撮像された投影面の画像との差分に基づいて前記電磁波発生装置および前記投影面の間に存在する物体の投影像を検出する投影像検出部、および、前記物体の投影像の位置に基づいて前記物体の位置を検出する位置検出部、を有する位置検出装置と、を位置検出システムに設ける。
(もっと読む)
複数画像を用いた変形計測装置
【課題】 被測定物の変形等が大きい場合であっても確実に変位量を測定することができる変位計測装置を提供する。
【解決手段】 少なくとも3枚の撮影画像に対し、画像対ごとに、変形前画像の測定対象領域に含まれる着目画素bi(x,y)に対応付けられる変形後画像内の画素を、照合画素aj(x+mx,y+my)として決定し、ピクセル単位での変位量(mx,my)を求める演算を測定領域画素について行う連続画像間ピクセル変位算出部と、照合画素aj(x+mx,y+my)とその隣接画素の画像情報に基づいて、サブピクセルオーダーでの照合画素変位量(Δxk,Δyk)を求める連続画像間サブピクセル変位算出部と、画像の対ごとに算出された照合画素のピクセル単位の変位量とサブピクセルオーダーの変位量とを累積加算し、測定開始時点から測定終了時点までの変位量を算出する累積変位量算出部とを備える。
(もっと読む)
欠陥検出装置および欠陥検出方法
【課題】緩やかに湾曲する面に含まれる検査領域の欠陥を精度よくかつ容易に検出する。
【解決手段】欠陥検出装置1は、対象物9を移動する移動機構11、検査領域において移動方向に垂直な方向に帯状に伸びるとともに移動方向に沿って並ぶ複数の照射領域に平行光を照射する複数の光照射部2、および、複数の照射領域からの乱反射光を受光して複数の照射領域を同時に撮像する撮像部3を備える。複数の照射領域の各位置における法線の方向を平均した方向を示す平均法線を含み、かつ、移動方向に平行な参照面に複数の光照射部2の光軸A1〜A3を投影した場合に、検査時において、投影された複数の線が平均法線に対して同じ側に傾斜し、複数の線と平均法線とのなす角が互いに異なるように光照射部2が設定され、対象物9が複数の照射領域の幅の最小値以下の距離だけ移動する毎に撮像動作が行われる。これにより、検査領域の欠陥が精度よくかつ容易に検出される。
(もっと読む)
液滴粒子撮像解析システムおよび解析方法
【課題】噴霧液滴粒子を撮像し、画像処理を行い、粒子径および粒度速度を同時に測定する液滴粒子撮像解析システムおよび解析方法を提供すること。
【解決手段】液滴粒子撮像解析システムは、液滴粒子の集合(M)に光を照射する光源部(1、2)と、液滴粒子の前記集合を所定の時間間隔で撮像する撮像部(3、4)と、撮像部によって撮像された画像を記録する記録部と、制御部(8)とを備え、制御部が、画像から粒子を検出し、粒子の粒子径と、粒子径を直径とする円周の長さで粒子の輪郭線の長さを除した値である円形度とを求め、円形度が所定のしきい値以上である粒子を焦点深度内の粒子の候補として選択し、連続して測定した2枚の画像において対応する2つの候補粒子を検出し、焦点深度内の粒子として決定し、2つの焦点深度内の粒子間の距離を前記時間間隔で除して、粒子速度を求める。
(もっと読む)
回転体の計測装置
【課題】簡易な装置で回転中の回転体の所要位置を必要な方向から適切に観測、計測できるようにした、優れた回転体の計測装置を提供する。
【解決手段】先端に対物レンズ1を有し中間に光導出入部たるハーフミラー2を有する光学系OPと、この光学系OPの基端側に光学的に接続される画像取得手段たるカメラ3と、ハーフミラー2に明滅光Xを導入すべく設けられる明滅光源4とを具備し、明滅光源4からの明滅光Xをハーフミラー2を介して光学系OPの先端側より導出し、これを計測対象である回転中の回転体Rに対し空隙を介して照射した後、反射した明滅光X´を光学系OPの対物レンズ1及びハーフミラー2を介してカメラ3に計測可能な状態で取り込み、仮想停止状態で回転体Rの計測を行い得るように構成した。
(もっと読む)
1 - 20 / 57
[ Back to top ]