
Fターム[2F065LL06]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | レンズ;レンズ系 (2,973) | 変倍レンズ (254) | ズームレンズ (138)
Fターム[2F065LL06]に分類される特許
61 - 80 / 138
デジタルカメラ
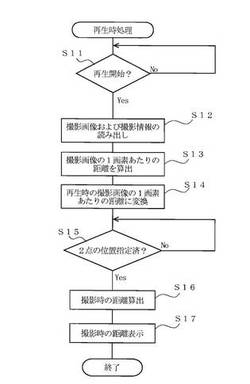
【課題】 従来のカメラでは、被写体の大きさを正確に測定できず、また、被写体の表示画面にスケールを表示させようとすると、撮影時のカメラ操作が煩わしくなってしまう。
【解決手段】 CPU4は、撮影画像の再生表示が開始されると(S11)、記録媒体17から読み出した撮影情報に含まれる被写体21の半画角θおよび撮影距離f’に基づいて、撮像素子2における撮影画像の単位記録画素当たりの被写体21のサイズを算出する(S12,S13)。続いて、算出した撮影画像の単位記録画素当たりの被写体21のサイズを、液晶モニタ7における再生時の撮影画像の単位表示画素当たりのサイズに変換する処理を行う(S14)。続いて、十字キーに対する操作によって、液晶モニタ7に再生表示される撮影画像の任意の2点の位置が指定されると、指定された2点間の撮影時の被写体21のサイズLABを算出する(S15,S16)。
(もっと読む)
3次元情報検出装置

【課題】1台のカメラで同時に撮像した被写体の2次元画像群を基にして被写体の3次元情報を検出することを図る。
【解決手段】空間的又は時間的に強度変調された強度変調光を発生する距離検出用光源部10と、被写体で強度変調光が反射された反射光を透過する複数のレンズ15が多眼的に配置されたレンズアレイ14と、複数のレンズ15の各々を透過した透過光を2次元撮像素子の結像面で各々結像させて、複数のレンズ15の各々に対応する被写体画像群を撮像し、該被写体画像群に基づいて被写体の3次元情報を検出する3次元カメラ16と、を備える。
(もっと読む)
露光装置およびデバイス製造方法
【課題】露光装置の構成の複雑化やコストの増加を抑えながら照度センサの位置を高精度に検出する。
【解決手段】露光装置EXは、照明系ILによって照明される原版11のパターンを投影光学系13によって基板14に投影して基板14を露光する。露光装置EXは、照明系ILによる照明領域を規定する遮光部材10と、投影光学系13の像面において照度を計測するための照度センサ18の該像面における位置を検出する制御部CNTとを備える。制御部CNTは、投影光学系13の像面に対して光が入射する位置が該像面に沿って移動するように遮光部材10を移動させながら得られた照度センサ18の出力に基づいて該像面における照度センサ18の位置を検出する。
(もっと読む)
三次元測定装置及び三次元測定方法
【課題】画角を変更する操作に応じた三次元画像を取得可能にする。
【解決手段】被写体を撮像する撮像手段を備えてなる三次元測定装置において、三次元画像データを取得し、取得した三次元画像データを、三次元画像データで表わされる三次元画像の少なくとも一部ob1の奥行き方向の位置及び/又は大きさが変化するように、前記撮像手段の画角変換操作部材の操作T、Wもしくは該操作部材の操作T、Wに対応する操作に基づいて処理する。
(もっと読む)
振動計測システム及びコンピュータプログラム
【課題】 PIVの技術を応用した非接触タイプで、信頼性の高い演算結果が得られる振動計測システム及びコンピュータプログラムを提供する。
【解決手段】 振動数演算手段432において有意なパワースペクトルが得られていないと判定される場合に、PIV解析手段431における計測領域の設定パラメータを変更して再度PIV解析及び振動数の演算を行う構成であるため、信頼性の高い演算結果(振動数)が得られる。また、判定手段433及び再処理指令手段434を設けた構成とすることにより、振動数演算手段432において有意なパワースペクトルが得られているか否かが自動的に判定され、有意なパワースペクトルが得られていないと判定される場合には、再度PIV解析及び振動数の演算が行われるため、信頼性の高い演算結果(振動数)を速やかに得ることができる。
(もっと読む)
カメラキャリブレーション装置およびカメラキャリブレーション方法
【課題】 極めて簡単にカメラキャリブレーションを実現する。
【解決手段】 固定カメラによる撮影画像上に設定された2次元の画像座標と、実空間に設定された3次元の世界座標と、を対応付けるカメラパラメータを求めるカメラキャリブレーション装置および方法において、実空間における高さzがz=0の平面(x,y,0)を模擬したマップ画像が用意される。このマップ画像の2次元座標値(α,β)と当該平面の世界座標値(x,y,0)とは、スケーラ40によって相関付けられている。従って、実空間に置かれた指標の位置がマップ画像上で指定されると、その位置の世界座標値(x,y,0)が求められ、これに指標の高さが加えられることで、当該指標の高さ位置の世界座標値(x,y,z)が求められる。即ち、指標の世界座標値(x,y,z)が極めて簡単に求められ、ひいては極めて簡単にカメラキャリブレーションが実現される。
(もっと読む)
画像処理装置および方法並びにプログラム
【課題】視差に基づいて距離画像を生成する際に、視差を精度良く算出できるようにする。
【解決手段】ステレオマッチング部30が、基準画像G1上の各画素に対応する対応点を参照画像G2において探索する。距離画像生成部31が対応点に基づいて距離画像を生成する。1つの対象画素に対して複数の対応点が探索された場合、対応点決定部32が、対象画素の周囲にある複数画素の距離値に基づいて、対象画素およびその周囲における被写体形状を算出し、対象画素と複数の対応点のそれぞれとに基づいて、対象画素における距離情報である対象距離情報を複数の対応点毎に算出し、被写体形状との差異が最も小さい対象距離情報を算出した対応点を有効な対応点に決定する。
(もっと読む)
マーカ検出識別装置およびそのプログラム
【課題】撮像された映像をマーカが妨害することなく、かつ、精度よくマーカを検出・識別することが可能なマーカ検出識別装置を提供する。
【解決手段】マーカ検出識別装置3は、不可視マーカごとに、当該不可視マーカが配置されている位置の近傍領域における色特徴量を予め記憶する記憶手段31と、不可視光撮像系で撮像した不可視光画像において、予め定めた輝度値を閾値として不可視マーカを検出するマーカ検出手段34と、マーカ検出手段34で検出された不可視マーカの位置に対応する可視光撮像系で撮像された可視光画像の位置の近傍領域における色特徴量を生成する検出マーカ色情報生成手段35と、検出マーカ色情報生成手段35で生成された色特徴量と、記憶手段31に記憶されている色特徴量との類似の度合に基づいて、不可視マーカを個別に識別するマーカ識別手段36と、を備える。
(もっと読む)
画像データ解析のための画像キャプチャシステム及び方法
【課題】画像(200)の取得のためのシステムを提供する。
【解決手段】システムは、画像(200)を取得するための主軸Hに沿って配置されたキャプチャ手段(210)と、拡散光を生成するための照明手段(220)とを備えている。照明手段は、導光手段(221)と、少なくとも1つの光源(222)とを備えて、その放射光が導光手段(221)内に入射されつつ、導光手段(221)内を伝播するように構成されている。導光手段(221)は、導光手段内を伝播する光が拡散状態で導光手段(221)の少なくとも1つの側面(223)上に抜け出るように設計されている。
(もっと読む)
ファイル生成装置および方法、3次元形状再生装置および方法並びにプログラム
【課題】3次元データのファイルから簡易に所望とする距離範囲の3次元形状を再生できるようにする。
【解決手段】3次元データ生成部31が、撮像部21A,21Bが被写体を撮像することにより取得した画像データから、被写体の3次元形状を表す複数の距離データからなる3次元データを生成する。データ変換部24Aが、距離データを距離順に並べ替えて変換済み3次元データを生成する。ファイル生成部24が、変換済み3次元データを所定距離間隔により分割した場合の境界における距離データを特定し、特定された距離データのファイル内における格納場所を表す格納場所情報および変換済み3次元データが格納された3次元データファイルを生成する。
(もっと読む)
光学系、パターン検査装置、パターンの検査方法、パターンを有する物品の製造方法
【課題】干渉縞の発生を大幅に抑制することができる光学系、パターン検査装置、パターンの検査方法、パターンを有する物品の製造方法を提供する。
【解決手段】入射する光を複数のビームに分割するインテグレータユニットと、前記インテグレータユニットを光軸の回りに回動させる第1の駆動手段と、前記インテグレータユニットの出射側に設けられ、互いに光路長が異なる複数の凹部を有する回転位相板と、前記回転位相板を回転させる第2の駆動手段と、を備えたことを特徴とする光学系が提供される。
(もっと読む)
距離画像処理装置および方法、距離画像再生装置および方法並びにプログラム
【課題】距離画像の画像ファイルのデータ量を効率よく低減撮影者が所望とする量子化方式により距離値Xi,Yi,Ziを変換することができることとなる。できるようにする。
【解決手段】撮像部21A,21Bが、被写体を撮像することにより、被写体の3次元形状を表す奥行き情報および位置情報を含む距離値を算出するための基準画像および参照画像を取得する。距離画像生成部31が、基準画像および参照画像から距離値を算出する。距離画像変換部32が、所定範囲にある奥行き情報について、所定範囲外にある奥行き情報よりも大きい量子化数により量子化し、距離画像符号化部33が量子化された位置情報を含む距離値を各画素の画素値とする距離画像を符号化し、圧縮/伸長処理部24が符号化された距離画像の画像ファイルを生成する。
(もっと読む)
検査装置
【課題】ワークを保持部などの保持機構で保持した状態であっても、誤認識なくワークの良否判定を行う。
【解決手段】検査装置1では、ワーク2を照明する円環状の光源部33を有する照明部3と、ワーク2を撮影する撮影部4とが設けられ、ワーク2を保持する保持部5が、照明部3と撮影部4との間に固定もしくは移動可能に配され、照明部3の光源部33からワーク2に照射した光の照射方向上から外れた位置に、撮影部4が配されている。そして、ワーク2に異物を含む不確定な物がある場合、光源部33からワーク2に照明した光は、異物を含む不確定な物によりその光路が変更されて撮影部4にて撮影される。
(もっと読む)
空間内において少なくとも1つのオブジェクトを最終姿勢に高精度で位置決めするための方法およびシステム
本発明は、空間内において少なくとも1つのオブジェクトを最終位置に高精度で位置決めするための方法およびシステムに関する。オブジェクト(12)を産業用ロボット(11)によって把持公差以内で把持および保持する。前記産業用ロボット(11)の前記把持公差を補償する調整量を求める。前記オブジェクト(12)を高精度で最終姿勢に位置調整するため、該オブジェクト(12)が所定の公差以内で該最終姿勢に達するまで、以下のステップを繰り返し行う:撮像画像を光学的撮像装置(1a,1b)によって撮像するステップ。空間座標系における前記オブジェクト(12)の実際の姿勢を、前記光学的撮像装置(1a,1b)の位置(Pa,Pb)と、角度測定ユニット(4a,4b)によって検出された前記光学的撮像装置(1a,1b)のカメラ(2a,2b)の角度方向と、前記オブジェクト(12)における特徴的要素(13)の知識とから求めるステップ。前記調整量を使用して、前記産業用ロボット(11)の現在のポジショニングと、姿勢差に関連する量とから、該産業用ロボット(11)の新たな目標ポジショニングを決定するステップ。前記産業用ロボット(11)を前記新たな目標ポジショニングに位置調整するステップ。  (もっと読む)
(もっと読む)
3次元形状測定装置
【課題】測定者の意図した測定が行われなかった場合であっても容易に測定条件の再設定を行う。
【解決手段】被測定物に投影光を投射する投光手段と、前記投影光による前記被測定物の投影光画像を取得する撮像手段であって、該撮像手段の撮像面を区分する部分領域毎の撮像による部分的な前記投影光画像を順に読み出す部分読み出しが可能に構成されるとともに、前記撮像面全面での撮像による前記投影光画像を読み出す全面読み出しが可能に構成された撮像手段と、前記撮像手段から部分読み出しされた複数の部分投影光画像に基づいて、前記被測定物の距離画像を算出する算出手段と、当該距離画像と前記撮像手段から全面読み出しされた全体投影光画像とに基づいて、前記被測定物の再測定部位を指定する指定手段と、前記指定された再測定部位に対応する測定条件を設定する設定手段とを備える3次元形状測定装置とする。
(もっと読む)
クラック幅計測システム、操作装置、クラック幅計測方法、及びクラック幅計測プログラム
【課題】クラック幅を計測する精度を向上することを可能とする。
【解決手段】床下点検ロボット200が撮像対象物を撮像することによって得られた撮像画像のデータを取得する制御部130及び通信装置110と、クラック幅の計測に用いられる線画及び数字が付されたクラックスケール画像のデータを取得する図形描画部160と、撮像画像のデータと、クラックスケール画像のデータとを合成することによって、合成画像データを生成する画像合成部170と、合成画像データに応じて、撮像画像及びクラックスケール画像を表示する表示部180とを備え、画像合成部170は、表示部180においてクラックスケール画像が撮像画像上に重ねて表示されるように、合成画像データを生成する。
(もっと読む)
撮像システム及び方法
【課題】動く三次元物体を撮像するための撮像システム及び方法を提供すること。
【解決手段】動く三次元物体を撮像するための撮像システムにおいて、該システムは、3つの異なる角度から前記物体を照射する少なくとも3つの光源と、前記物体から反射された前記3つの光源からの放射を集めるように備えられたビデオカメラと、前記三次元物体の深度マップを生成するように構成された画像プロセッサと、を備える。前記光源の各々は、異なる周波数の放射を発する。前記画像プロセッサは、前記3つの異なる光源からの反射信号を識別するように構成されている。
(もっと読む)
計測装置およびその計測方法
【課題】色収差による焦点差を利用して、被検物の表面形状に応じた高精度な測定ができる計測装置およびその計測方法を提供することを目的とする。
【解決手段】本発明に係る計測装置1は、複数の画素領域21を有したイメージセンサー20と、イメージセンサー上に被検物8の表面の像を結像させる色出しレンズ11と、色出しレンズ11を構成する少なくとも一部のレンズを光軸方向に移動させて像の大きさを拡大または縮小させることが可能なズーミング駆動装置11aと、ズーミング駆動装置11aにより拡大または縮小されてイメージセンサー上に被検物の表面の像を結像させた状態において、画素領域のそれぞれが受光した光の強度に基づいて、被検物の表面の光軸方向の相対位置を算出して被検物の3次元形状を測定する演算処理部30とを備えて構成されている。
(もっと読む)
局所的位置決定システムとその方法
ビデオカメラ、ビデオカメラと通信するコンピュータ、及びビデオカメラが捉える目標物であって目標物座標系を有する目標物を含む局所的位置決定システムが提供される。コンピュータは、目標物に対するビデオカメラの位置及び向きを画定し、目標物座標系におけるビデオカメラの位置及び向きを決定し、且つ目標物座標系における対象点の位置を決定するよう適合されている。本システムは、目標物上の、過去に記録された対象点にカメラの照準を合わせためにも使用できる。目標物との接触、又は目標物への接近は不要である。局所的位置決定方法も開示される。  (もっと読む)
(もっと読む)
校正用三次元フィールド、校正用三次元フィールドの撮影方法
【課題】焦点距離が可変であるズームレンズの場合でも、比較的狭い空間でキャリブレーション体を用いたキャリブレーション体の撮影作業やキャリブレーション作業が可能な校正用三次元フィールドを提供する。
【解決手段】広角用領域110と、広角用領域110と重複する領域中に設けられた望遠用領域120とを有する校正用三次元フィールドであって、望遠用領域120の内部に配置された、望遠用の粗位置合わせ基準マーク122、及び望遠用の精密位置合わせ基準マーク124と、広角用領域110に配置された、広角用の粗位置合わせ基準マーク112、及び広角用の精密位置合わせ基準マーク114とを備えている。
(もっと読む)
61 - 80 / 138
[ Back to top ]