
Fターム[2F065LL06]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | レンズ;レンズ系 (2,973) | 変倍レンズ (254) | ズームレンズ (138)
Fターム[2F065LL06]に分類される特許
21 - 40 / 138
起伏観察装置
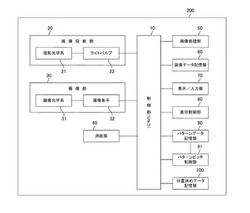
【課題】大がかりな装置構成とすることなく、自宅等で簡単に顔のたるみや体型等をセルフチェックすることが可能な起伏観察装置を提供する。
【解決手段】起伏観察装置である起伏観察機能付きカメラ200は、投影用パターンデータを記憶するパターンデータ記憶部90と、投影用パターンデータを用いて観察対象物にパターン画像を投影する画像投影部20と、観察対象物を撮像する撮像部30と、投影用パターンデータと撮像部30により撮像された撮像データとを重ね合わせることにより、観察対象物の起伏状態を強調した画像を生成する画像処理部50と、を有する。
(もっと読む)
画像測定装置及び画像測定方法

【課題】自由度の高い画像測定装置及び画像測定方法を提供する。
【解決手段】本発明に係る画像測定装置は、撮像手段と、撮像手段によって被測定対象を撮像して得られた画像情報から被測定対象の座標情報を算出する演算手段とを有し、演算手段は、撮像手段によって被測定対象を撮像して得られた画像情報を、撮像手段に固有の誤差情報によって補正して補正画像情報を得る誤差補正手段と、補正画像情報から被測定対象の座標情報を算出する座標算出手段とを備える。
(もっと読む)
パターン検査装置、パターン検査方法、およびパターンを有する構造体
【課題】検査感度を向上させることができるパターン検査装置を提供する。
【解決手段】第1の検出データと前記第1の遅延データとから解像限界以下のパターンのデータを抽出する第1の抽出部33と、前記抽出された第1の検出データに係るデータの注目画素に対する周辺領域の出力レベルの平均値を演算し、前記抽出された第1の検出データに係るデータの出力レベルと前記平均値との差を演算する第1の出力変位演算部34aと、前記抽出された第1の遅延データに係るデータの注目画素に対する周辺領域の出力レベルの平均値を演算し、前記抽出された第1の遅延データに係るデータの出力レベルと前記平均値との差を演算する第2の出力変位演算部34bと、前記第1及び第2の出力変位演算部による演算結果に基づいて、パターン欠陥を検出する。
(もっと読む)
点検システム
【課題】 安価で正確に点検することができるシステムを提供する。
【解決手段】
点検システムは、遠隔操作されるロボット1(移動体)と、ロボット1に設置されたビデオカメラ15と、ロボットから離れて配されるディスプレイ22とを備えている。ロボット1には、第1、第2のレーザービームLBL,LBRを同一平面Pに沿って平行に発射する第1、第2のレーザーポインタ18L、18R(レーザー発射器)が設けられている。第1、第2の指標画像ZL,ZRがディスプレイ22に表示される。ユーザーは、第1、第2のレーザービーム像TL、TRが、第1、第2の指標画像ZL,ZRに入るようにロボット1を遠隔操作し、これにより、ビデオカメラ15の光軸15aと第1、第2レーザービームLBL,LBRを平坦な対象面と直交させる。
(もっと読む)
欠陥検査装置
【課題】欠陥検査装置では検出倍率を上げて微細欠陥検出感度を向上させるため、焦点深
度が浅くなり、環境変動によって結像位置がずれ、欠陥検出感度が不安定になる課題があ
る。
【解決手段】被検査基板を搭載して所定方向に走査するXYステージと、被検査基板上の
欠陥を斜めから照明し、その欠陥を上方に配した検出光学系で検出する方式で、この結像
状態を最良の状態に保つために、温度及び気圧の変化に対して、結像位置変化を補正する
機構を備えたことを特徴とする欠陥検査装置。
(もっと読む)
画像機器の校正用パターン
【課題】被測定物の測定パターンに関わらず、測定誤差を低減させることができる画像機器の校正用パターンの提供。
【解決手段】校正用パターン1は、校正用パターン1の中央に設けられる矩形状の明領域からなる中央部11と、中央部11の外側に設けられる枠状パターン12とを備える。枠状パターン12は、中央部11を中心として横方向に沿って両側に延出し、等間隔とは異なる所定の間隔で明領域、及び暗領域を交互に繰り返す横方向パターンと、中央部11を中心として縦方向に沿って両側に延出し、等間隔とは異なる所定の間隔で明領域、及び暗領域を交互に繰り返す縦方向パターンとを有している。そして、横方向パターン、及び縦方向パターンは、中央部11における所定の位置から両側に等距離だけ離間した位置にエッジを有し、各エッジにおける濃淡値の変化方向は同一である。
(もっと読む)
被写体計測方法
【課題】 写真などで大きさを把握するための目安となるよう煙草のケース等を一緒に撮り後に画面上で対比することでおおよその寸法を計測していた。
【解決手段】 正対した被写体が平面と仮定し、その被写体の大きさが被写体面寸法(Y)=結像面寸法(X)×(被写体間寸法(T)÷結像主点間寸法(b)−1)のY=X(T÷b−1)の式で分かることから計算結果を表示するようにすることで長さが分かり、画像内にある焦点の合っている測りたい物体の始点と終点に任意により点を合わせることで画像内の目印の各点間の寸法を対比計算することで被写体寸法を割り出すことができ、自動認識により画像内で線、角度等を認識し座標を設け各距離を割出すことができ又、これらの画像による座標確認を面積計測用のソフトに組込むことで作図作業が不要になる。
(もっと読む)
構造物変位量測定方法
【課題】画像式測定方法であっても、動的測定や1mm以下の微小変位を離れた位置からの完全非接触測定を可能とし、測定精度の推定を可能にする構造物変位量測定方法を提供する。
【解決手段】動的撮影を行い、基準画像と測定画像とを比較、画素変位量を算出し、撮影距離と撮影角度の情報をもとに、画素数で表わされた変位量を実スケールの単位に変換し、変位量を算出する。あわせ実測定誤差も算出する。現地の条件により、測定誤差が大きい場合には、撮影条件を変更する。大気揺らぎの影響を軽減するために、撮影距離の制約を導入、夜間撮影による測定を可能にする。また、測定データに大気揺らぎの影響がある場合、フィルタ処理などによる軽減を可能とする。
(もっと読む)
物体検出装置
【課題】従来に比して物体を正確に検出可能とする物体検出装置を提供する。
【解決手段】自車両周辺の物体を検出する物体検出装置であって、自車両に搭載され、検知領域内に存在する物体を検出する物体検出手段と、少なくとも自車両が走行する道路の周辺に存在する障害物の位置情報を外部から取得する周辺情報取得手段と、物体検出手段の検知領域を周辺情報取得手段によって取得した障害物の位置情報に応じて変更する検知領域変更手段とを備える物体検出装置である。
(もっと読む)
結像光学系及び形状測定装置
【課題】ズームレンズの変倍動作により移動する入射瞳の位置に対物レンズの射出瞳の位置を略一致させるように構成された結像光学系、及び、この結像光学系を有する形状測定装置を提供する。
【解決手段】形状測定装置100に用いられる結像光学系30は、測定物体の像を結像する対物レンズ25と、この像を変倍するズームレンズ32と、変倍動作により光軸に沿って移動するズームレンズ32の入射瞳の位置に、対物レンズ25の射出瞳の位置を略一致させる瞳移動光学系としてのリレーレンズ31と、を有する。
(もっと読む)
ケーブル弛度観測システム
【課題】 ケーブルの弛度観測を容易かつ適正に行えるようにする。
【解決手段】 弛度測定装置10に、送電線Eの弛み部を撮影する主カメラ20と、主カメラ20を載置し主カメラ20による撮影方向を調節自在な雲台20と、を備え、地上側装置として、弛度測定装置10に制御指令を送信するリモコン50と、主カメラ20による撮影画像を表示するモニタ60と、を備え、リモコン50からの制御指令により、主カメラ20と雲台20とが制御可能となっている。
(もっと読む)
3次元位置測定装置
【課題】 画像法の3次元位置測定装置において、測定可能な測定対象物の大きさ、及び測定対象物までの距離の範囲を拡げる。
【解決手段】 撮影視野の仰角、方位角、及び画角の設定を変更する機能を有するPTZカメラ1、2と、PTZカメラ1、2の撮影視野の設定情報及び撮影画像情報に基づいて、PTZカメラ1、2が撮影した測定対象点の3次元座標を算出する3次元座標算出手段34とを有する。
(もっと読む)
視覚検査システム
【課題】ワークに対してカメラを任意の位置、姿勢に移動させながら視覚検査を行うことができるものであって、設備全体の小型化を図る。
【解決手段】支持台2上にYZロボット3を設け、その前方に回転テーブル4を設ける。YZロボット3は、Z軸移動機構5、Y軸移動機構6、前後(Y軸)方向に延びる光軸Oを有しワークWを撮影するカメラ7を備え、カメラ7を前後(Y軸)及び上下(Z軸)方向に自在に移動させる。回転テーブル4は、ワークWを載置し、垂直方向に延びる回転軸θ周りに自在に回転させる。カメラ7の先端に180度以上の画角を有する超広角レンズ10を設ける。
(もっと読む)
曲率測定装置
【課題】小型で広い範囲の曲率を精度よく測定できる曲率測定装置を提供する。
【解決手段】被検査体3を載置台5に載置し、レーザ発光器10により発光されたビーム光をポリゴンミラー22で等角速度走査し、fθレンズ50を介して、被検査体3表面を走査する。被検査体3表面から反射されたレーザ光をシリンドリカルレンズ60で集光し、載置台5の一点から等距離で、互いの距離が一定である位置に配置され、被検査体3から反射されるビーム光を検出する2つのビーム光検出センサ(第1及び第2レーザ光検出センサ30,32)でレーザ光を検出した時間差及び2つのビーム光検出センサ30,32の間の距離d2、被検査体3表面からの距離Lに基づいて、被検査体3の表面の曲率を算出する。
(もっと読む)
絞りの検査方法及び内視鏡装置
【課題】絞りが組みつけられた状態で容易に且つ確実に絞りの開口の形状を検査することができる絞りの検査方法及び内視鏡装置を提供すること。
【解決手段】被検体の像を取得するための光学系を有する光学機器に組みつけられた絞りを検査する絞りの検査方法であって、検査光を出射する検査光源を前記絞りよりも前記光学系の像面側に配置し、前記検査光を前記絞りの開口を覆う範囲に照射する照射工程S2と、前記絞りを通過した前記検査光により前記開口の像を撮像し、前記撮像された像の形状に基づいて前記絞りを検査する検査工程S5と、を備える。
(もっと読む)
光学式自己位置検知装置及び方法
【課題】検知位置精度が高く、自己の姿勢も検知可能な技術であって、簡易に実現可能な技術を提供することを目的とする。
【解決手段】移動フィールド20を移動する移動体10には、エリアセンサカメラ12が搭載されている。この移動フィールド20内の適当な位置に、少なくとも2つ以上の色彩変化発光体30が固定装備されており、かつその位置関係は既知である。
色彩変化発光体30は、各発光体毎に個別の色彩変化パターンで発光している。この色彩変化パターンで、各色彩変化発光体30a、30b、が識別される。エリアセンサカメラ12が2以上の色彩変化発光体30をキャプチャすることによって、それらの画像中の位置を知ることができる。それらの位置関係から、移動体の位置・向きを算出することができる。色彩変化パターンで各色彩変化発光体30a、30bを識別するので、形状に歪みが生じたり等しても、その識別を行うことができる。
(もっと読む)
被写体寸法測定用カメラ装置
【課題】 本発明は、電子カメラで被写体や現場状況の撮像を行いながら被写体をズームアウト(縮小)したり、ズームイン(拡大)したりして撮像しても正確にかつ簡便に被写体の大きさや寸法を測定する装置および方法の提供を課題とする。
【解決手段】 被写体寸法の測定または比較機能付カメラ装置において、複数のビーム光源と、該複数のビーム光源は前記カメラの光軸と並行して発光ビームを照射するよう所定距離だけ離間して前記カメラに装着されていることを特徴とする。
(もっと読む)
三次元形状計測装置
【課題】部分的に公差の規定の異なる部品の外形寸法の測定を、煩雑な作業を伴うことなく効率的に行う。
【解決手段】測定物の三次元形状測定に関する所定の性能属性がそれぞれ異なる三次元測定部10−1,10−2,10−3と、測定物の測定箇所に対応させて、所定の性能属性に基づいて三次元測定部10−1,10−2,10−3から一の三次元測定部を選択する測定箇所特定部21と、選択された一の三次元測定部に測定物を測定させる測定実行部23とを備えた。
(もっと読む)
むら検査方法及びむら検査装置
【課題】周期性のあるパターンの被検査体に対し、回折光によるコントラストから正常部と変動部とを精度良く識別でき、かつ、モアレのような外乱要素を含まない被検査画像を取得すること。
【解決手段】本発明の実施の形態1に係るむら検査装置は、透過照明部10、X−Y−θステージ部20、アライメント用撮像部30、回折光強度測定部兼撮像部40及び処理・制御部100を具備している。X−Y−θステージ部20は、被検査基板60の位置決め動作及び基板搬送動作が可能である。アライメント用撮像部30は、被検査基板60の位置決めを実施する。回折光強度測定部兼撮像部40は、被検査基板60からの回折光強度を取得し、また、被検査画像取得を実施する。処理・制御部100の情報処理手段101は、透過照明部10、X−Y−θステージ部20、アライメント用撮像部30及び回折光強度測定部兼撮像部40の動作管理及び制御を行う。
(もっと読む)
フォトマスクの特性検出装置およびフォトマスクの特性検出方法
【課題】本発明は、フォトマスクの特性を検出することができるフォトマスクの特性検出装置およびフォトマスクの特性検出方法を提供する。
【解決手段】被検出体に形成されたパターンの光学像に基づいて検出データを作成する検出データ作成部と、前記パターンに関する参照データを作成する参照データ作成部と、特性の検出対象となるパターンに対応する参照パターンと、前記参照パターンの位置情報と、を前記参照データから抽出する抽出部と、前記参照パターンに基づいて特性を検出する領域を設定するとともに、前記位置情報に基づいて前記検出データから前記特性の検出対象となるパターンを抽出する第1の領域設定部と、前記特性を検出する領域における前記特性の検出対象となるパターンの特性を受光面上に結像された光学像を光電変換することで検出する検出部と、前記検出された特性を集計する集計部と、を備えたことを特徴とするフォトマスクの特性検出装置が提供される。
(もっと読む)
21 - 40 / 138
[ Back to top ]