
Fターム[2F065LL06]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | レンズ;レンズ系 (2,973) | 変倍レンズ (254) | ズームレンズ (138)
Fターム[2F065LL06]に分類される特許
41 - 60 / 138
フォームファクタが小さいサイズセンサ
本明細書で開示される主題は、モバイル機器から遠隔の物体までの距離を測定すること、または遠隔の物体のサイズを測定することに関する。 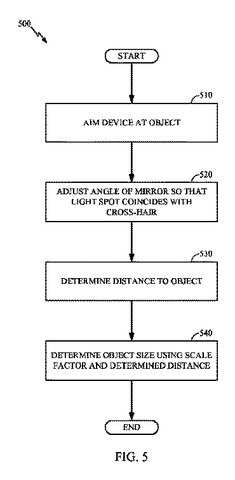 (もっと読む)
(もっと読む)
光ビーム調整方法及び光ビーム調整装置

【課題】部品数の増加及び装置の大型化を伴うことなく、短時間でビーム照射位置の調整が可能なビーム調整装置を実現する。
【解決手段】調整用ミラー19a、19bはチルト機構101により回転され、シフト機構102により直線的に移動される。光18はビーム調整機構10で調整後、集光レンズ移動機構121でレンズ12を移動させレンズ12通過後の光及びレンズ12を通過しない光がCCDカメラ13に照射される。レンズ12とCCDカメラ13の受光面との距離は焦点距離でありレンズ12中心とCCDカメラ中心との位置を合せておく。チルト調整量を算出しビーム調整機構10で平行光となるように補正し、その後にレンズ12を通過させずにCCDカメラ13に光を入射させビームのシフト調整量を算出しビーム調整機構10でCCDカメラ13の中心に光が収束するようにビームのシフト、チルトを補正する。
(もっと読む)
フォトマスクの特性検出装置およびフォトマスクの特性検出方法

【課題】本発明は、フォトマスクの特性を検出することができるフォトマスクの特性検出装置およびフォトマスクの特性検出方法を提供する。
【解決手段】被検出体に形成されたパターンの光学像に基づいて検出データを作成する検出データ作成部と、前記パターンに関する参照データを作成する参照データ作成部と、特性の検出対象となるパターンに対応する参照パターンと、前記参照パターンの位置情報と、を前記参照データから抽出する抽出部と、前記参照パターンに基づいて特性を検出する領域を設定するとともに、前記位置情報に基づいて前記検出データから前記特性の検出対象となるパターンを抽出する第1の領域設定部と、前記特性を検出する領域における前記特性の検出対象となるパターンの特性を受光面上に結像された光学像を光電変換することで検出する検出部と、前記検出された特性を集計する集計部と、を備えたことを特徴とするフォトマスクの特性検出装置が提供される。
(もっと読む)
画像処理装置および画像処理方法
【課題】オクルージョン領域の奥行き情報を精度良く求めること。
【解決手段】複数の視点で被写体を撮像して得られた複数の画像間で、各画素の対応関係を検出する対応関係検出手段31と、前記対応関係が検出された画素の奥行き情報を含む奥行きマップを作成する奥行きマップ作成手段32と、オクルージョン領域とその周囲領域とからなる画像参照領域を決定する画像参照領域決定手段34と、前記画像参照領域内の部分画像の特徴量に基づいて、前記画像参照領域を複数のクラスタに分割する領域分割手段35と、前記奥行きマップにおける注目クラスタの奥行き情報、および、注目クラスタの特徴量に基づいて選択した他のクラスタの奥行き情報のうち、少なくとも一方の奥行き情報に基づいて、オクルージョン領域の奥行き情報を算出するオクルージョン奥行き情報算出手段36と、算出された奥行き情報を奥行きマップに追加する奥行きマップ更新手段37を備えた。
(もっと読む)
デジタルゲージ付きの光学コンパレータ
観察スクリーンに背後から投射するように構成された光学コンパレータは、検査されるテスト部品の光学画像を観察スクリーンに投射する光学プロジェクタと、画素化テンプレートパターンの光学画像を同観察スクリーンに投射するビデオプロジェクタとを結合する。このテンプレートパターンは、テスト部品の描画された設計仕様を含む。テスト部品の形状を設計された形状と視覚的に比較するために、テスト部品の画像と画素化テンプレートパターンの画像が、観察スクリーンに同時に投射される。 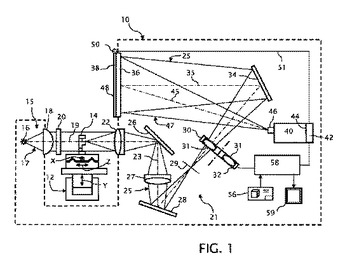 (もっと読む)
(もっと読む)
変位計
【課題】測定誤差に方向依存性がなく、ピンホールの位置を容易に調整することができる変位計の提供。
【解決手段】変位計1は、光源2と、集光レンズ4と、ピンホール5と、光路延長手段6と、結像レンズ7と、対物レンズ8と、受光手段9とを備える。集光レンズ4は、光源2、及びピンホール5の間に配設され、光源2から射出される光をピンホール5に集光させる。ピンホール5は、光源2、及び結像レンズ7の間に配設される。光路延長手段6は、ピンホール5と、結像レンズ7との間に配設され、S偏光の光路を延長する。受光手段9は、偏光ビームスプリッタ91と、2つの受光素子92,93とを備える。偏光ビームスプリッタ91は、入射した光をP偏光、及びS偏光に分離する。受光素子92は、P偏光の光を受光し、受光素子93は、S偏光の光を受光する。
(もっと読む)
距離計測装置、合成画像生成装置及び距離計測プログラム
【課題】移動する複数の被写体間の実空間上の距離情報を、簡素な構成で迅速に取得可能な距離計測装置、距離計測プログラムを提供することを目的とする。また、複数の被写体間の実空間上の距離情報を画像に合成表示することが可能な合成画像生成装置を提供することを目的とする。
【解決手段】本発明の実施形態に係る距離計測装置1は、複数の被写体を撮影する撮影手段10と、距離計測装置1からの実空間上の距離を、画像の水平座標に対応付けて計測する測距手段20と、画像を表示する表示手段30と、外部から、表示手段30に表示された画像上の被写体を指定する操作信号の入力を複数受け付け、この操作信号により指定された各指定位置の画像座標を順次取得する測距対象指定手段40と、この各指定位置の水平座標に対応付けられた各実空間上の距離に基づいて、指定された被写体間の被写体間距離を演算する距離演算手段50とを主に備える構成とした。
(もっと読む)
パターン検査装置、パターン検査方法、および微細構造体の製造方法
【課題】本発明は、パターン検査の検査精度を向上させることができるパターン検査装置、パターン検査方法、および微細構造体の製造方法を提供する。
【解決手段】被検査体に形成されたパターンに関する参照データと、前記パターンを検出することで得られた検出データと、を比較して前記パターンの検査を行うパターン検査装置であって、前記パターンを複数の領域に分割して前記複数の領域毎または前記複数の領域間毎の補正条件を求め、前記複数の領域毎または前記複数の領域間毎の少なくともいずれかにおいて対応する補正条件を適用して前記参照データを作成する補正処理部を備えたこと、を特徴とするパターン検査装置が提供される。
(もっと読む)
エッジ検出装置及びこれを用いた工作機械、エッジ検出方法
【課題】シルエットとして投影できない形状のエッジでも、非接触で、加工途中のワークなどを精度高く、かつ、リアルタイムで輪郭形状を数値的に測定可能とする光学的なエッジ検出装置を提供すること
【解決手段】本発明のエッジ検出装置は、投影光学系の光軸16aと平行な光線を遮光するアンチピンホールフィルタ25を備えた投影光学系と、投影光学系の光軸16aと一定の偏角θをもって配設された光源モジュール11と、撮像素子26と、コンピュータとを備え、光源モジュール11の平行光に照射されたワーク17からの反射光による投影画像を撮像素子で撮像し、エッジ近傍の信号強度を判定し、2本の帯状の高輝度の部分に挟まれた低輝度の線状部分をエッジと判定する。そのため、ワークのエッジを正確に検出でき、これを画像処理により数値処理することでCADやNC制御と連動させることができる。
(もっと読む)
トポグラフィーのゼロ接触測定方法
測定されるべき表面(S1)が、そのガラス裏面において、測定方向においてそれより前にある空気−ガラス表面(S2)を通して光学測定ビームでサンプリングされることを特徴とする、光学レンズあるいはレンズ結合体の球面状あるいは非球面状に湾曲した空気−ガラス表面のトポグラフィーのゼロ接触測定方法を開示する。この方法を実行する装置は、a)光学レンズ(2)またはレンズ系は、回転可能に取り付けられた中空シャフト(1)の端部側に、レンズまたはレンズ系の光軸が中空シャフト(1)の回転軸(3)と少なくともおおよそ一直線に並ぶように、固定され、b)光学測定ビーム(10)のための合焦光学系(6)は、中空シャフト(1)の内側に配置され、c)測定ビーム(10)を発生させるための測定ユニット(7)は、中空シャフト(1)の回転軸(3)に対して垂直に変位し得るように配置され、d)部分ビームを分離し、それを少なくとも1つの光学センサ(12)に送るための少なくとも1つのビームスプリッタ(11)が測定ビーム(10)に挿入され、e)オプトエレクトロニクトランスデューサおよび評価エレクトロニクスがセンサ(12)に与えられていることを特徴とする。 (もっと読む)
カメラの自動キャリブレーション装置及び自動キャリブレーション方法
【課題】本発明は、カメラの自動キャリブレーション装置及び自動キャリブレーション方法に係り、カメラの位置や向きのズレに起因する撮影画像の画像処理時の計測誤差の発生を防止することにある。
【解決手段】撮影対象として所定基準面を基準にして面対称な特徴点の組を複数有する面対称物体を含むカメラの撮影画像から、面対称物体の面対称特徴点の少なくとも2組を抽出し、その抽出される面対称物体の面対称特徴点の少なくとも2組に基づいて、所定基準面を特定する基準面パラメータ、及び、該面対称物体の面対称特徴点の少なくとも2組を含む面対称構成平面を特定する構成面パラメータを導出する。そして、その導出される基準面パラメータ及び構成面パラメータに基づいて、撮影対象とカメラとの座標系の対応を示す回転パラメータ及び並進パラメータを更新する。
(もっと読む)
画像機器の校正用パターン
【課題】被測定物の測定パターンに関わらず、測定誤差を低減させることができる画像機器の校正用パターンの提供。
【解決手段】校正用パターン1は、校正用パターン1の中央に設けられる正方形状の明領域からなる中央部11と、中央部11の外側に設けられる枠状パターン12とを備える。枠状パターン12は、中央部11を中心として横方向に沿って両側に延出し、明領域、及び暗領域を交互に繰り返す横方向パターンと、中央部11を中心として縦方向に沿って両側に延出し、明領域、及び暗領域を交互に繰り返す縦方向パターンとを有している。そして、横方向パターン、及び縦方向パターンは、中央部11の横方向、及び縦方向における辺の長さに対して1/3の長さにそれぞれ設定される単位長さごとに明領域、及び暗領域を交互に繰り返している。
(もっと読む)
計測装置及び計測方法
【課題】撮像素子を用いた被写体の変異量計測において、非移動被写体の減算演算を簡素化し、減算精度の向上により測定精度を向上させる。
【解決手段】第1の画像を構成する第1の画素群と第2の画像を構成する第2の画素群とが所定の配列形態にしたがって交互に配列された単一の撮像素子を用いて、それぞれ露光時間の異なる第1の画像と第2の画像とを取得し、第1の画像と第2の画像との差分に基づいて変異する被写体を検出し、第1の画像と第2の画像との差分に基づいて変異する被写体の画像内の位置、移動速度、移動方向、及び面積の変化量のうち少なくとも1つを算出する算出して出力する。
(もっと読む)
キャリア形状測定機
【課題】キャリアおよびキャリアに収容された半導体ウエハの姿勢を精度良く測定することのできる形状測定機を提供する。
【解決手段】測定対象であるキャリア18を支持するステージ12,20と、測定対象の形状を測定する測定部10とを有する。ステージ12,20は、キネマティックカップリングによって測定対象を支持するために、キネマティックカップリングピン20a,20b,20cを有する。
(もっと読む)
高速近似焦点用システムおよび方法
【課題】高速近似焦点用システムおよび方法を提供する。
【解決手段】いくつかの後続する検査動作をサポートするために十分に焦点合わせされた、近似的に焦点合わせされた画像を提供する高速近似焦点動作である。これらの動作は、平面ワークピースを検査する場合に主流である連続検査動作用の画像を提供するために用いられる場合に特に有利である。検査スループットの改善がもたらされる。なぜなら、従来の自動焦点動作とは対照的に、高速近似焦点動作は、最良の焦点合わせされた画像を決定するための基礎として実行モード中に画像スタックを取得しないからである。より正確に言えば、学習モード中に特徴固有の代表焦点曲線および焦点閾値が決定され、実行モード中に用いられて、いくつかの検査動作を確実にサポートする近似的に焦点合わせされた画像を提供する。一実施形態において、許容可能な、近似的に焦点合わせされた検査画像が、2つの対応する画像を提供する2つの焦点調整移動の範囲内で提供される。調整移動は、学習モードにおいて提供される特徴固有の代表焦点曲線に基づいている。
(もっと読む)
撮影システム及びレンズ装置
【課題】複数の被写体から主被写体を自動的に選択し、距離や速度等の被写体情報を表示する。
【解決手段】撮影システムは、撮影範囲内に設けられた複数の測距エリア1〜16のそれぞれにおいて被写体距離を算出する距離算出手段114と、複数の測距エリアのそれぞれにおいて被写体速度を算出する速度算出手段116と、被写体距離、該被写体距離間の差、被写体速度、及び該被写体速度間の差のうち少なくとも1つを表す被写体情報を生成する情報生成手段114,116と、複数の測距エリアのうち、速度算出手段により算出された被写体速度が第1の範囲SA内である測距エリアを抽出する抽出手段117と、カメラにより生成された撮影映像と抽出手段により抽出された測距エリアに対応する被写体情報とを含む出力映像を生成する出力映像生成手段203とを有する。
(もっと読む)
半導体チップの外観検査方法
【課題】半導体チップの有無に応じて検査エリアを設定し、効率的に外観検査が行える半導体チップの外観検査方法を提供する。
【解決手段】半導体チップ26が配列された領域を含む外観検査エリア40を格子状に区分けして、複数の第1外観検査エリア42を設定するステップと、第1外観検査エリアに斜め上方から光を照射し、半導体チップの有無を検出し、検出された半導体チップの座標を求めるとともに、半導体チップの第1外観検査を行うステップと、半導体チップの座標データに基づいて、第1外観検査エリア42を、半導体チップが配列されていない領域51はスキップするとともに、同一の半導体チップを2度検査しないように区分けして、複数の第2外観検査エリア52〜55を設定するステップと、第2外観検査エリアに上方から光を照射し、半導体チップの第2外観検査を行うステップと、を具備する。
(もっと読む)
マーカ自動登録方法及びシステム
【課題】近両用マーカの3次元位置と方向の計測と計測結果の記憶の手間を省くと共に計測ミスの発生を低減する。
【解決手段】作業環境の基準となる位置(世界座標系の原点や座標軸上の点)及び適宜な位置に遠近両用マーカ1を貼り付け、作業環境に貼り付けた遠近両用マーカ1を見渡せる位置にビデオカメラ2とレーザ距離計測器3を備えたマーカ自動登録システムを設置して作業環境に貼り付けられた総ての遠近両用マーカ1の3次元位置と方向を計測し、これを世界座標系Wで表された3次元位置と方向に変換して記憶する。
(もっと読む)
形状測定装置
【課題】対物レンズの光軸に沿って、被検物を移動することなく、被検物の形状を測定できるようにする。
【解決手段】MLA12は、対物レンズ11の瞳面又は結像面に配置され、撮像素子13は、MLA12の背後に設置され、被検物像を撮像する。ズーム用レンズ駆動装置51は、ズーム用レンズZLの移動によって被検物の像の大きさを拡大又は縮小し、合焦レンズ駆動装置52は、合焦レンズFoLの移動によって被検物に焦点を合わせる。演算処理回路34は、撮像素子13の出力から複数の測定画像を生成し、MLA12に配列された複数のMLの各々に対応する撮像素子13の撮像領域を構成する画素のうち、対物レンズ11の主光線と交わる位置にある画素から得られる基準画像を補正情報として用いて、被検物の形状を測定する。本発明は、被検物の3次元の形状を計測する形状測定装置に適用できる。
(もっと読む)
欠陥検査方法及び欠陥検査装置
【課題】
微細な欠陥から散乱した光の取込範囲を拡大し信号強度を高める欠陥検査装置及び欠陥検査方法を提供する。
【解決手段】
被検査基板1を搭載して光学系に対し相対移動可能なステージ部300と、被検査基板1上の検査領域4を照明する照明光学系100と、被検査基板1の検査領域4からの光を検出する検出光学系200と、検出光学系200によって結像された像を信号に変換するイメージセンサ205と、イメージセンサ205の信号を処理し欠陥を検出する信号処理部402と、検出光学系200と被検査基板1の間に配置され、被検査基板1上からの光を検出光学系200に伝達する平面反射鏡501とを備える。
(もっと読む)
41 - 60 / 138
[ Back to top ]