
Fターム[2F065MM13]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 投光系による走査 (1,119) | 投光器の移動 (300)
Fターム[2F065MM13]の下位に属するFターム
Fターム[2F065MM13]に分類される特許
41 - 57 / 57
非接触式3次元形状測定装置
【課題】 測定対象物の形状や大きさによって基準物が配置された回転テーブルの大きさや形状を変更せず、また回転テーブルの上で測定対象物の向き等の位置を変えることなく、測定対象物の外形全体の測定を可能にする装置を提供する。
【解決手段】 非接触式3次元形状測定手段によって、各領域の測定と同時に測定する、直方体で前記直方体の上面、前後の相対する面、及び左右の相対する面に1個、もしくは複数の球体を有する測定基準物を備えている。また、非接触式3次元形状測定手段により各領域の測定と同時に測定する、基板の上に直方体を固定し、前記直方体の前後、左右の面から間隙を設けた位置に球体が取り付けられた測定基準物を備えている。
(もっと読む)
3次元距離測定装置及び脚車輪型ロボット

【課題】測距センサの駆動機構に阻害されずに走査範囲を走査することが可能な3次元距離測定装置及び当該装置を備えた脚車輪型ロボットを提供する。
【解決手段】3次元距離測定装置200を、2次元距離測定装置112と、モータ116と、エンコーダ118と、プーリ120a及び120bと、ベルト121とを含んだ構成とし、モータ116の第1の回転軸を、プーリ120aの回転軸となるように当該プーリ120aと係合し、モータ116の回転駆動力で、プーリ120aを回転駆動する。プーリ120a及びプーリ120bは、その軸心A及びBの位置が水平方向に所定の距離を開けるように配設し、プーリ120aの回転駆動力は、ベルト121を介してプーリ120bに伝達されるようにした。また、プーリ120bと、2次元距離測定装置112を回転駆動する第2の回転軸とは、当該第2の回転軸がプーリ120bの回転に連動して回転するように係合した。
(もっと読む)
自由形状面の形状を測定するための装置及び方法
本発明は、測定対象物の自由形状面の形状を測定するための装置であって、所定の移動経路に沿って移動可能な、点測定による光学式及び/又は干渉式の走査アームと、測定しようとする前記自由形状面に集束される測定光線とを有している形式のものに関する。この場合、前記走査アームは、前記測定光線が、測定しようとする自由形状面に、垂直に又は走査アームの導入角度内で当たるように、前記走査アームの走査ポイントに関連して少なくとも一平面内で回転せしめられるようになっている。  (もっと読む)
(もっと読む)
座標測定機のための改良された継ぎ手軸
本発明の1つの態様は、第1の端と、第2の端と、それらの間の複数の継ぎ合わせアームセグメントと、を有する関節付きアームを含む座標測定機器を含み、各アームセグメントは、少なくとも1つの位置トランスデューサを含む。アームの第2の端には、測定プローブアセンブリが結合される。測定プローブアセンブリは、アームの第2の端と測定プローブアセンブリのボディとの間に第1の回転軸を提供する第1の継ぎ手を含む。エンコーダは、エンコーダケースおよびエンコーダシャフトを含む。エンコーダケースは、ボディに剛結合されるエンコーダシャフトに対して第2の軸を中心に回転するように構成される。エンコーダシャフトにプローブが剛結合される。第2の軸を中心にプローブに対して回転するように、測定機器がエンコーダケースに結合される。 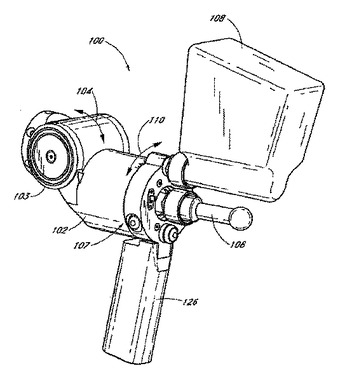 (もっと読む)
(もっと読む)
光角度検出装置
【課題】到来する光の強度が小さい場合でも、光の入射角を高精度に検出できる小型で安価な光角度検出装置を提供すること。
【解決手段】第1、第2の受光素子4a,4bは、リモートコントロール信号を入射光として受けて光電変換すると共に、その入射角θに応じて受光量が互いに相違するように、外部に対して遮光要素3a,3bを介して互いに並べて配置されている。第1、第2の受光素子4a,4bの出力をそれぞれ増幅器21,22が増幅して第1、第2の信号を得る。除算器61は第1の信号と第2の信号との比を求める。この光角度検出装置2が有すべき角度分解能を±Δθtargetとし、最大検出角度θmaxに応じた定数をaとし、さらに、除算器61の入力部に印加されるバイアス電流と第1、第2の信号による電流の和との比をrとしたとき、増幅器21,22の増幅度は、r<a・Δθtargetなる関係を満たす。
(もっと読む)
電子部品の三次元測定方法
【課題】吸着ノズル等で保持された電子部品を三次元測定する際、該部品が水平方向から傾斜して保持されている場合でも、短時間で確実に測定できるようにする。
【解決手段】保持手段により保持された電子部品に、ライン光を投光した際の光切断線を撮像し、得られる画像データに基づいて、該電子部品の平坦度を測定する電子部品の三次元測定方法において、保持される電子部品の存在予想範囲を越えて、ライン光の走査範囲を設定すると共に、電子部品Pを前記保持手段に保持した後、前記走査範囲内で、ライン光を走査しながら、所定のピッチ1〜10で間欠的に投光し、各ピッチ毎に撮像した画像から予め測定位置を決定し、決定された測定位置(2)、(9)に、ライン光を位置決めして投光した際の光切断線を撮像する。
(もっと読む)
逐次多点式真直度測定法および測定装置
【課題】
大型液晶用マスク基板、大型機械加工面、大型定盤基準面などの長尺での真直度測定では、超精密駆動基準軸や超精密水準器、レーザー反射式コリメータなどが使用されている。
特に、大型マスク基板での1mを越す長尺測定では超精密駆動基準軸は高価格であり、水準器やコリメータでは被測定物との接触が問題となる。そこで、低価格で非接触式の高精度測定システムが求められている。
【解決手段】
本発明は、従来の遂次3点測定法の欠点である多数点測定での累積誤差の増大、測定ピッチの制限を改良した。遂次3点測定での累積誤差は測定点数の2乗に比例している。本発明では長尺の全長を数ブロックに分割し、ブロック間を3個のセンサー21,22,23による従来の3点法で計測し、ブロック内は4個目のセンサー24で同時信号処理にて測定し、累積誤差の大幅な軽減化と測定ピッチの任意化が可能となった。
(もっと読む)
内面形状の測定方法とこの方法による測定装置
【課題】 光学的な手段を利用して対象物内面の形状を非接触で測定する方法とこの方法を用いた測定装置について提供すること。
【解決手段】 各種の管やエンジンブロックなどの内部空間を有する工業製品や人体の口腔などの生体器官の内部を測定対象としその対象内面3の断面形状を測定するに当り、測定する内面の所定位置に光ビームSbを円盤状に照射し、その照射光Sbによる内面形状を表わす光跡を撮像センサ2により撮影して前記光跡の画像データを蓄積し、蓄積した光跡画像のデータから前記撮像センサ2を含む撮影系の基準位置と測定対象内面3との距離を算出して当該内面3の形状Ipを測定すること。
(もっと読む)
光イメージング装置
【課題】光プローブの種類を交換して使用した場合にも、高速かつ確実に断層像を得ることができる光イメージング装置を提供する。
【解決手段】当該光イメージング装置に装着された何れかの光プローブ部と接続し、被検体から戻ってきた低干渉性光と基準光とを干渉させるとともに、干渉位置を光軸に対し軸方向に走査するため所定の走査範囲に対応した伝搬時間を周期的に変化させる第1の伝搬時間変化手段と、当該光イメージング装置に装着された何れかの光プローブ部の光路長のバラツキを吸収できるだけの光路長に対応した伝搬時間を変化させる第2の伝搬時間変化手段と、互いに光路長の異なる複数種類の光プローブ部の種類に応じた複数の異なる光路を設定可能とし、当該光イメージング装置に装着された光プローブ部の種類に合わせ当該光路長を切換可能な光ディレイ部とを備える。
(もっと読む)
立体物イメージスキャナ
【課題】 立体物イメージスキャナにおいて大きい立体物の全体像を良好な画質で取得する。
【解決手段】 スキャニングユニット24は、リニアイメージセンサとテレセントリック結像系を内蔵し、直線状のターゲット平面領域48を撮像する。直線状の2本の光源34A、34Bがスキャニングユニット24の左右両側に配置され、ターゲット平面領域48を照明する。スキャニングユニット24と光源34A、34Bは一緒に三次元的(X、Y、Z方向)に移動し、それにより、ターゲット平面領域48が被写体空間15を三次元的にくまなくスキャンする。一方の光源34Aのみを点灯して三次元スキャンを行い、得られた画像データ中のピントの合った画素を繋いで合焦点画像を形成し、次に、他方の光源34Bのみを点灯して同様に合焦点画像を形成し、そして、両合焦点画像を加算平均する。
(もっと読む)
球体の角度検出装置
【課題】小型で測定角度が広く、しかも安価で精度がよい球体の角度検出装置を提供することである。
【解決手段】回転自在に支持された球体に設けた受光手段と、前記受光手段と対向して設けられた複数の発光手段と、前記発光手段を所定のパターンで走査発光させて前記受光手段が受光したときの受光量と発光位置情報とに基づいて前記球体の角度を検出する制御手段とを備えた。
(もっと読む)
接着剤の画像認識装置及び方法
【課題】 接着剤の色や材質等の種類に影響されることなく、接着剤の画像認識を精度良く行うことが可能な接着剤の画像認識装置及び方法を提供する。
【解決手段】 接着剤2の塗布された透明又は半透明の塗布対象部材3上を照明する照明手段(4)と、照明手段(4)による照明のもとで、塗布対象部材3を背景とする塗布された接着剤2の画像を取得する撮像手段(6)とを備え、撮像手段(6)によって取得された撮像画像に基づく画像認識を行う接着剤の画像認識装置1において、塗布対象部材3の接着剤2を塗布しない側に、照明手段(4)による照明光を拡散して反射させる拡散部材5を備えることを特徴とする。
(もっと読む)
三次元形状計測システム及び計測方法
【課題】 三次元形状計測装置の台数が増加しても短時間に三次元形状を計測可能で、大規模な形状計測も可能な三次元形状計測システム等を提供する。
【解決手段】 測定対象物107に正弦波格子パターンを投射する格子パターン投射手段101と、格子パターン投射手段を保持しながら、格子パターン投射手段を一定の方向に一定量ずつ移動させる格子駆動手段と、正弦波格子パターンが投射された測定対象物の画像を撮影する画像撮影手段100とを備えた複数台の三次元形状計測装置103〜106を有する三次元形状計測システムにおいて、各々の格子パターン投射手段は、互いに異なる波長の正弦波格子パターンを同時に投射する。投射される格子パターンの波長が異なるため、隣接する装置同士のパターン光が干渉しても三次元形状の計測が可能となり、各三次元形状計測装置が同時に計測することができる。
(もっと読む)
形状と材質の測定方法
【課題】測定対象物の膜材質の屈折率が既知かどうかに関わらず、不明瞭な境界領域を残さずに、装置が複雑になる膜厚分布を測定することなく、高精度に、直接、測定面内の各測定位置ごとの表面材質の分類を可能にすること
【解決手段】共焦点光学系による形状測定を用いる形状と材質の測定方法であり、共焦点光学系の光軸に垂直に設置した被測定物の測定面を、共焦点光学系内で光軸方向に相対移動させることで、被測定物の測定面に対する合焦位置に配置されたピンホールを通過する光量の極大値の発生の回数を数えることで、測定面内の各測定位置ごとの表面材質の分類を行う。
(もっと読む)
暗フィールド検査システム
サンプルを検査する装置は、サンプルの表面のエリアに光学放射を向けるように適応された放射ソースと、複数の像センサとを備えている。各像センサは、上記エリアから異なる各々の角度範囲へ散乱された放射を受け取って、上記エリアの各像を形成するように構成される。像プロセッサは、各像の少なくとも1つを処理して表面上の欠陥を検出するように適応される。  (もっと読む)
(もっと読む)
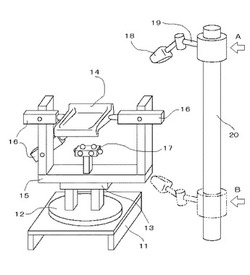
非接触形状測定装置
【課題】 非接触形状測定装置において、製造現場等の任意の場所へ持ち運んで精密な測定をすることができ、従来の測定装置よりもずっと低価格にできること。
【解決手段】 非接触形状測定装置1においては、移動式測定器3を底部12に取付けられた3個のマグネットで鋼鉄製の定盤2に固定し、2個の画像センサ11A,11Bで定盤2の表面に付された微小な不均一な模様を撮像して、2つの撮像画面をパソコンのメモリーに記憶された不均一な模様の全てのデータと瞬時のうちに比較照合して、登録データの中の一致するパターンをサーチして撮像中心点A,点Bの座標を極めて高精度で算出できるので、計測部(変位センサ)7から細いビームに集光した可視レーザ光を製品Wに照射して計測される製品形状のデータも高精度で得られ、製造現場等の任意の場所へ持ち運んで精密な測定をすることができ、従来の測定装置よりもずっと低価格にできる。
(もっと読む)
非平面的試料を調査するための方法及び装置
試料特に(製薬)錠剤を調査するための方法及び装置である。放射体及び/又は試料は、最初は、放射体が所定の距離にあり、試料表面の最初に照射した点の法線方向に位置する。放射体は25GHz〜100THzの範囲で複数の周波数を持つ光を試料の複数の点に照射する。放射体と試料とは相対的に位置を変えることが可能である。ただし、その位置の変更は、放射体と試料との間では所定の距離(試料表面と放射体との)を保存し、放射体は各照射点の法線と一致させ、透過又は反射した光を各点で検出することが可能になるようにする。この特徴的な応用として(製薬)錠剤のコーティングの形状及び組成を画像化するというのがある。 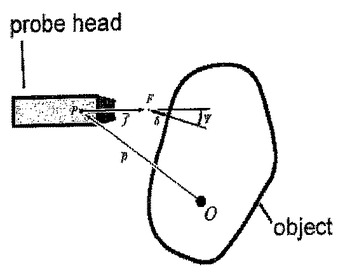 (もっと読む)
(もっと読む)
41 - 57 / 57
[ Back to top ]