
Fターム[2F065PP25]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 測定器の形態 (1,547) | ロボット (378)
Fターム[2F065PP25]に分類される特許
101 - 120 / 378
物品認識装置及びこれを用いた物品処理装置
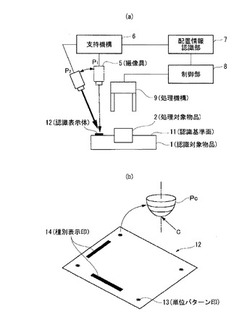
【課題】認識対象物品の位置及び姿勢に関する配置情報を高精度に認識する。
【解決手段】認識対象物品1に設けられ、中心位置Cから周囲に向かって濃度パターンPcが順次変化するように形成される単位パターン印13を予め決められた位置関係で四以上有する認識表示体12と、認識対象物品1に対向配置されて認識表示体12を撮像する撮像具5と、この撮像具5の撮像面とこの撮像具5の視野範囲に入る認識対象物品1に設けられる認識表示体12面とが正対しない非正対計測位置P2に少なくとも撮像具5を設置可能とするように撮像具5を支持する支持機構6と、非正対計測位置P2に配置された撮像具5にて撮像された認識表示体12の撮像情報を少なくとも用い、認識対象物品1の位置及び姿勢に関する配置情報を認識する配置情報認識部7と、を備える。また、この物品認識装置を用いた物品処理装置をも含む。
(もっと読む)
推定装置、推定方法、及び推定プログラム

【課題】物体の3次元位置・姿勢を示す物体座標系を高精度で推定することができる推定装置、推定方法、及び推定プログラムを提供すること。
【解決手段】本発明の一態様にかかる推定装置は、空間中における対象物体の3次元位置・姿勢を示す物体座標系を推定する推定装置であって、対象物体を撮像した物体画像から、前記対象物体に設けられ、単体で3次元位置・姿勢を推定可能なマーカを検出するマーカ検出部3と、マーカ検出部3で検出された複数のマーカに対応する複数のマーカ座標系を算出するため、それぞれのマーカ画像からマーカ座標系を推定するマーカ座標系推定部と4、複数のマーカ座標系に基づいて、対象物体の物体座標系を決定する物体座標系決定部6と、を備えるものである。
(もっと読む)
移動体位置検出システムおよび方法
【課題】撮像した画像が照合用のデータベースにない場合でも位置検出を円滑に継続できる移動体位置検出システムおよび方法を提供する。
【解決手段】平面12上を移動する移動体16の位置を検出する移動体位置検出システム10であって、平面12上に配置された複数のドットからなるドットパターン14と、移動体16に備えられ、移動体16が位置する平面12上の領域を撮像する撮像手段20と、撮像手段20が時間的に連続して取得した2画像中に共通して含まれるドットパターンの位置関係に基づいて、2画像間の位置および方向関係を求め、移動体16の現在位置および方向を推定する推定手段28と、を備えるようにする。
(もっと読む)
溶接ワーク形状計測装置
【課題】溶接ワークの開先角が90°以下で様々な角度をとる場合に、溶接対象部における反射スリット光を特定領域に集めるようにカメラ及び投光器を配置することで、本来のスリット光を容易に検出して、安定的に溶接ワークの開先形状を計測する。
【解決手段】溶接ワークWの開先Kにある溶接線Lに対して直交するように投光器2からスリット光Sを照射し、スリット光Sが照射された溶接ワークWの開先Kをカメラ3で撮像する場合に、投光器2とカメラ3とを、溶接ワークWの開先Kがなす開先角θの2等分線Rと溶接線Lとを含む平面H上で、且つ撮像画像G中においてスリット光Sが反射スリット光S’よりも投光器2の照射方向の基側に存在するように配置して、撮像画像Gを投光器2の照射方向の基側から探索してスリット光Sを抽出することにより、溶接ワークWの開先Kの形状を計測する。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と平行な垂直面以外の任意平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定する走査部と、距離に基づいて対象物の任意平面上の断面形状に相当する第1のパターンを算出する算出部と、人物の両脚に相当する任意平面上の断面形状の第2のパターンが予め複数登録されている記憶部と、第1及び第2のパターンを比較して、比較結果に基づいて対象物から人物の脚の特徴を抽出する抽出部と、抽出した特徴に基づいて対象物が人物であるか否かを判断する判断部を備えるように構成する。
(もっと読む)
袋入り製品の位置検出方法及びその装置
【課題】袋入り製品の袋歪みに影響されずにケース内の袋入り製品を認識して、その位置を短時間で検出することが可能な袋入り製品の位置検出方法及びその装置を提供する。
【解決手段】袋入り製品の位置検出装置10は、表面に模様が記載された収納袋に物品を封入した袋入り製品の群から抽出した複数のサンプルの表面に現れる模様のサンプル画像12の輝度分布特徴を求める学習手段13と、袋入り製品がケース内に並べられた状態を撮影したカメラ画像15から切出した複数の分割画像16の中から、輝度分布特徴に似た類似輝度分割画像を求め、類似輝度分割画像のカメラ画像15内での位置に基づいて袋入り製品のケース内での製品位置を求める認識手段17とを有する。
(もっと読む)
視覚検査システム
【課題】ワークに対してカメラを任意の位置、姿勢に移動させながら視覚検査を行うことができるものであって、設備全体の小型化を図る。
【解決手段】支持台2上にYZロボット3を設け、その前方に回転テーブル4を設ける。YZロボット3は、Z軸移動機構5、Y軸移動機構6、前後(Y軸)方向に延びる光軸Oを有しワークWを撮影するカメラ7を備え、カメラ7を前後(Y軸)及び上下(Z軸)方向に自在に移動させる。回転テーブル4は、ワークWを載置し、垂直方向に延びる回転軸θ周りに自在に回転させる。カメラ7の先端に180度以上の画角を有する超広角レンズ10を設ける。
(もっと読む)
曲率中心検出装置及びこれを使用した孔位置検出方法
【課題】球面部を有する球状体の曲率中心の位置を精度良く、且つ効率的に検出することのできる曲率中心検出装置及びこれを使用した孔位置検出方法を提供する。
【解決手段】一定の曲率半径を有して形成された球状体1の曲率中心を検出する曲率中心検出装置であって、前記球状体1の断面形状を計測する2次元変位センサ21と、該2次元変位センサ21より計測された前記断面形状に関する情報に基づいて、前記球状体1の曲率中心を演算する演算部23とを備えている。
(もっと読む)
シーラー塗布形状監視装置
【課題】複雑なシステムを採用することなく、簡単なシステム構成により、シーラーの塗布品質の管理を正確に行うことができるシーラー塗布形状監視装置を提供する。
【解決手段】ワークWの表面に塗布されたシーラーの塗布品質を判定するシーラー塗布形状監視装置1であって、ワークW及びワークWの表面に塗布されたシーラーZに対してレーザ光Lを照射し、その照射したレーザ光の反射光L´を受光し、その受光した反射光からワークW及びシーラーZの表面輪郭形状を検知する2次元変位センサ3と、2次元変位センサ3が検知した表面輪郭形状を用いて、ワークWの表面に塗布されたシーラーZの高さ及び幅を算出する制御装置10と、制御装置10が推定したシーラーZの高さ及び幅と、所定の基準値とを比較し、ワークWの表面に塗布されたシーラーZの塗布品質の良否を判定する塗布設備制御盤20とを備える。
(もっと読む)
モデル作成装置およびモデル作成プログラム
【課題】対象物を複数のカメラで撮像して得られる画像データから3次元情報を取得し、当該取得した3次元情報を3次元モデルデータと照合することで、当該対象物について3次元認識を行う処理に用いられる、3次元モデルデータを容易に作成することが可能なモデル作成装置およびモデル作成プログラムを提供する。
【解決手段】本実施の形態に従う3次元モデルデータ作成処理においては、認識すべき対象物の設計データ(CADデータ)を用いて、3次元モデルデータを作成する。この作成処理は、コンピュータ上で実行される設計データに対する変換処理および編集の処理と、実用環境で実行されるティーチングの処理とを含む。3次元モデルデータの作成処理においては、ワークモデルWMを撮像する必要がない。
(もっと読む)
キャリブレーション装置及びキャリブレーション方法及び位置検出用治具及び部品検査装置
【課題】より簡易な構成でありながら、部品を把持する把持部とその位置を補償するためのカメラとの相対位置を補償、校正することのできるキャリブレーション装置及びキャリブレーション方法、及びこうしたキャリブレーションに用いられる位置検出用治具、及び部品検査装置を提供する。
【解決手段】キャリブレーション装置は、部品検査装置に設けられ、ICチップを搬送するロボットハンドユニットが備えるICチップを撮像するカメラの視野中心と、認識されたICチップを吸着するノズルの軸中心との間の相対位置関係を検出する。部品検査装置には、この相対位置関係を検出するためにノズルの平行移動範囲内に設けられたフォトセンサー41と、該フォトセンサー41と所定の位置関係でかつカメラの撮像範囲内に設けられた認識マーク45とが設けられている。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法およびプログラム
【課題】 距離画像の計測値の欠損に起因した精度低下を軽減することが可能な位置姿勢の計測技術を提供すること。
【解決手段】 対象物体の位置姿勢を計測する位置姿勢計測装置は、対象物体の距離画像上の画素に対して距離が最小となる形状モデル上の点が、第1の探索部により得られた欠損モデル領域内に存在するか否かを判定する判定部と、形状モデル上の点が欠損モデル領域内に存在すると判定された場合に、第2の探索部により得られた、距離が最小となる距離画像上の画素と形状モデル上の点との組み合わせに補正を施す補正部と、補正が施された、距離画像上の画素と形状モデル上の点との組み合わせにおいて、距離画像上の画素と形状モデル上の点との間の距離の総和を最小にする形状モデルの位置及び姿勢を、対象物体の位置及び姿勢の計測値として算出する算出部と、を備える。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、およびプログラム
【課題】距離画像から対象物体の位置姿勢を算出する位置姿勢算出の精度低下を防ぎながら処理速度を維持向上させる。
【解決手段】対象物体までの距離画像を取得する取得部と、距離画像から対象物体の概略位置姿勢を決定する概略位置姿勢決定部と、形状モデル上の所定領域に対応する、距離画像における領域の距離情報のばらつきの程度を示すばらつき値を算出する算出部と、ばらつき値が小さい程、サンプル点の数が少なくなるように、形状モデル上の所定領域ごとに当該所定領域からサンプル点をサンプリングするサンプリング部と、概略位置姿勢からサンプル点と距離画像上の2次元計測点を3次元座標に変換した3次元計測点とを対応付ける対応付け部と、各サンプル点と各3次元計測点との間の距離の総和が最小になるように対象物体の位置姿勢を決定する位置姿勢決定部と、を備える。
(もっと読む)
撮像装置及び撮像方法
【課題】欠陥検出に適した画像を取得することを目的とする。
【解決手段】被検査物の検査対象領域に照明光を照射し、検査対象領域の基準画像を基準となる基準撮像条件に従って取得し、基準画像をクラスタリング処理して複数のクラスタに分割し、各クラスタが所定の条件に合致するかを判定し、各クラスタが所定の条件に合致しない場合に、所定の条件に合致しないクラスタの撮像条件を変更し、所定の条件に合致しないクラスタの画像を変更された撮像条件に従って取得し、全てのクラスタが所定の条件に合致するまで撮像条件の変更及びクラスタの画像の取得を繰り返し、全てのクラスタが所定の条件に合致すると判定された場合に、所定の条件に合致した各クラスタの画像を合成して検査対象領域の合成画像を取得する。
(もっと読む)
3次元計測装置、処理方法及びプログラム
【課題】3次元形状モデルと計測データとの対応付けの演算の効率化を図り、対象物体の位置及び姿勢の算出を高速化する。
【解決手段】3次元計測装置は、対象物体の3次元形状モデルの幾何特徴上の点を選択し、対象物体の位置及び姿勢を示す概略値と距離画像の撮影時の撮影パラメータとに基づいて当該選択された幾何特徴上の複数の点を距離画像上に投影し、投影点から所定範囲内の領域で3次元形状モデルの幾何特徴に対応する距離画像上の幾何特徴を探索して対応付ける。そして、当該対応付けられた3次元形状モデルの幾何特徴と距離画像上の幾何特徴との3次元空間における距離の差を用いて対象物体の位置及び姿勢を算出する。
(もっと読む)
基板保持装置およびそれを用いた欠陥修正装置
【課題】より単純な構造で基板を保持できる基板保持装置と、その基板保持装置を適用した欠陥修正装置とを提供する。
【解決手段】欠陥修正装置1では、ガラス基板99が載置される1対の基板端支持台3が配設されている。1対の基板端支持台3によって挟まれた領域には、ガラス基板99を下方から支持する複数の基板支持用コロ機構4が配設されている。基板支持用コロ機構4には、載置されたガラス基板99の下面を吸着して保持する基板吸着台26が取り付けられている。
(もっと読む)
露光方法及び装置、並びにデバイス製造方法
【課題】露光工程のスループットを高め、基板の複数のパターン形成領域に互いに異なるパターンを露光できるようにする。
【解決手段】シート基板Pの露光装置であって、シート基板Pを走査方向D1に移動する基板駆動装置10と、マスクM1〜M3を保持して上面MBaに沿って移動するマスクステージMS1〜MS3と、駆動対象のマスクステージMS2の走査方向D2の位置情報を計測する干渉計33XA,33XBと、この計測結果に基づいて、マスクステージMS2を走査方向D2に移動する駆動装置と、マスクステージMS1〜MS3の走査方向D2の位置を相互に入れ替えるステージ入れ替え装置24と、を備える。
(もっと読む)
透明平板検出システム
【課題】透明平板の検出を簡易かつ高精度に行う。
【解決手段】透明平板114を含む領域を、該透明平板114の平面部法線方向に対して所定の角度から撮像して、垂直偏光画像および水平偏光画像を撮像するカメラ12と、載置台113と、載置台13の下側に設置された反射面111と、透明平板114の平面部法線に対して、カメラ12と対向するように配置され、透明平板114の平面部からの正反射光がカメラ12に入射しないように遮光する遮光板102と、垂直偏光画像および水平偏光画像に基づく縦横偏光度画像の縦横偏光度の分布に基づいて透明平板114を検出する画像処理装置13とを備える。
(もっと読む)
物体認識方法及び物体認識装置
【課題】予め登録しておくモデルデータのデータ量を抑制しながら、対象物の位置や姿勢を迅速に求めることができる物体認識方法及び物体認識装置を提供する。
【解決手段】距離センサ1により、対象物201を含む所定領域内の各点までの距離計測を行い、三次元物体認識手段3により、これら各点の計測データをメッシュデータ化し、このメッシュデータのグルーピングを行って複数のメッシュグループとし、各メッシュグループの法線ベクトルに垂直な投影平面を作成し、各メッシュグループを対応する投影平面に投影した投影データを求め、投影データの輪郭データを抽出して、輪郭データと対象物の二次元形状データとを比較して、対象物の位置及び姿勢を認識する。
(もっと読む)
3次元計測装置及びその制御方法
【課題】コード化パターンの投影を用いた3次元位置計測を高速に行なえるようにする。
【解決手段】計測対象物体の位置姿勢を計測する3次元計測装置は、計測対象物体に投影するパターンを生成し、生成された複数種類のパターンを投影部により計測対象物体に投影して撮像部により撮影するとともに、投影したパターンと計測対象物体の形状モデルと計測対象物体の概略位置姿勢を示す情報とに基づいて、撮像により取得される撮像画像上のパターンの座標値を算出する。そして、算出された座標値を利用して、撮像画像上の撮影されたパターンと前記投影部により投影されたパターンとを対応づけし、計測対象物体に投影されたパターンと撮像部との距離を求める。また、求めた距離と当該計測対象物体の形状モデルとを用いて計測対象物体の位置姿勢を推定し、概略位置姿勢の情報を更新する。
(もっと読む)
101 - 120 / 378
[ Back to top ]