
Fターム[2F065QQ16]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | フーリエ変換;逆フーリエ変換 (544)
Fターム[2F065QQ16]に分類される特許
161 - 180 / 544
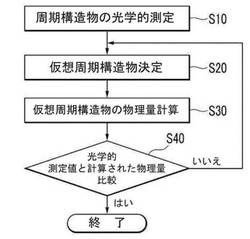
周期構造物の非破壊検査方法
【課題】
周期構造物の構造を早くかつ正確に把握する方法を提供する。
【解決手段】
仮想周期構造物を設定して、前記設定された仮想周期構造物を多数の層に分けて、リープマン−シュウィンガー積分方程式をM次内挿法で離散化させて前記仮想周期構造物に対する反射率または透過率に対する物理量を計算する工程を含む、周期構造物分析方法に対するもので、M次内挿法を用いてより早い時間内により正確な非破壊検査ができる。
(もっと読む)
突出形状測定装置および突出形状測定方法およびプログラム

【課題】測定対象の突部の突出形状を容易かつ精度良く測定する。
【解決手段】ロータリーダイカッター10のダイカットロール20の刃型22の突出形状を測定する突出形状測定装置1は、ロータリーダイカッター10が載置された走査ステージ16をダイカットロール20の回転軸線Nの軸線方向に移動させる駆動装置14と、走査時に変位計11から逐次出力される変位出力Yおよび受光量LIの走査位置xに応じた変化を検出する変位出力取得部52および受光量取得部53と、受光量LIが最大の走査位置xでの変位出力Yにより刃型22の刃先突出高さを検出する突出高さ算出部54と、走査位置xに応じた受光量LIの変化に係る状態量の検出値と、刃型22の刃先幅および状態量をパラメータとして作成したモデルデータとを比較し、状態量の検出値に対応するモデルデータから刃先幅を検出する突出幅算出部55とを備える。
(もっと読む)
測定装置及び測定方法
【課題】測定対象物の厚さ及び測定対象物の群屈折率を分離して測定可能な測定装置を提供する。
【解決手段】測定装置1は、移動ステージ4が、集光レンズ3で集光された測定光を受光して反射する反射鏡5との間に挿入された測定対象物6の一方の面6a及び他方の面6b、及び、集光レンズ3と反射鏡5との間に測定対象物6が挿入された状態及び挿入されていない状態で、反射鏡5に測定光の焦点が合うように集光レンズ3を移動させる。検出部20は、移動ステージ4により集光レンズ3を移動させてヘッド部30に戻された各測定光と、参照面31から戻された参照光との干渉光に基づく干渉信号をそれぞれ検出する。信号処理部60は、検出部20により検出した各干渉信号に基づいて、参照面31までの距離を基準にした測定対象物の一方の面6a及び他方の面6bまでの距離及び反射鏡5までの距離を求める。演算部7は、信号処理部60により求めた各距離から、測定対象物6の屈折率及び測定対象物6の厚さを求める。
(もっと読む)
周辺表示装置
【課題】1台のステレオカメラで周辺を見る画角を広げることが可能なシステムにおいて、統合処理や画像変換処理の負担を増大させることなく、かつ、対応点探索における対応付け精度を低下させることのない周辺表示装置を提供する。
【解決手段】ステレオカメラSCで撮影された画像データが入力される画像入力部11と、画像入力部11から出力される画像データに基準点および比較点を設定するポイント設定部と、基準点が設定された基準画像データおよび比較点が設定された比較画像データにウインドウを設定するウインドウ設定部13と、ウインドウが設定された画像データに対応点探索処理を施す対応点探索処理部14とを備えている。
(もっと読む)
画像処理装置、情報処理システム、画像処理方法、およびプログラム
【課題】遠景と近景とが共存する同一の被写体をとらえた複数の画像を対象とした対応点探索の高精度化を図ることが可能な技術を提供する。
【解決手段】画像処理装置が、第1視点から被写体を時間順次に撮像することで得られる複数の第1画像と、第2視点から被写体を時間順次に撮像することで得られる複数の第2画像とを取得する部分と、各第1画像に対して基準点を含む基準領域を同一配置となるように各々設定するとともに、各第2画像に対して基準領域の形状に対応する比較領域を同一配置となるように各々設定する部分と、複数の基準領域に係る画素値の分布から1つの2次元以上の空間に係る画素値の基準分布を生成するとともに、複数の比較領域に係る画素値の分布から1つの2次元以上の空間に係る画素値の比較分布を生成する部分と、画素値の基準分布と画素値の比較分布とを用いて、基準点に対応する複数の第2画像における対応点を検出する部分とを備える。
(もっと読む)
形状測定装置及び形状測定方法
【課題】エンコーダ等の機構を必要とせずに被検物の表面形状を測定することができる形状測定装置を提供する。
【解決手段】被検物Sの表面形状を測定するための形状測定装置1は、被検物Sに対して照射光L1を射出する光源部10と、照射光L1が被検物Sの表面で反射された物体光L2と、照射光L1から分離された第1参照光との光路差によって得られる干渉縞に基づいて被検物Sの所定領域の変位を基準変位として取得する基準変位解析部20と、物体光L2と、照射光L1から分離された第2参照光とが干渉して生じる干渉縞を用いて被検物Sの表面形状を参照強度として取得する参照強度解析部30とを備え、参照強度に基づいて、被検物Sの移動量が基準変位に関連付けられることを特徴とする。
(もっと読む)
ロボットシステムおよびロボットシステムの制御方法
【課題】ワークが撮像されたボケ画像からワークの位置を精度良く検出するロボットシステムを提供する。
【解決手段】ワークWに対して作業を実施するロボット10と、前記ワークWを載置するとともに、蛍光体マーカー74を備えたステージ72と、前記ワークWと前記蛍光体マーカー74とを所定の露光時間で撮像するカメラ20と、前記カメラ20の露光時間より短い周期で前記蛍光体マーカー74を点滅発光させるマーカー制御部45と、を備え、前記カメラ20により撮像されたボケ画像から前記蛍光体マーカー74の軌跡画像100を抽出して、前記軌跡画像100から点拡散関数を算出する点拡散関数算出部35と、算出した前記点拡散関数を用いて、前記ボケ画像を画像変換し前記ボケ画像からボケていない元画像を生成する画像生成部37と、前記元画像から前記ワークWの位置を算出する位置算出部39と、を有するロボットシステム5。
(もっと読む)
分光立体形状測定装置及び分光立体形状測定方法
【課題】測定に必要なデータ量を抑制しつつ、被測定物の立体形状及び分光情報を測定することが可能な分光立体形状測定装置及び分光立体形状測定方法を提供する。
【解決手段】分光立体形状測定装置1は、白色照明された被測定物によって反射又は散乱された測定光に対して白色干渉縞を生じさせる干渉計2と、干渉計2から出力された光の強度を測定する点検出器5と、点検出器5と接続され、白色干渉縞信号から被測定物の立体形状及び分光情報を求めるコントローラ6とを有する。コントローラ6は、干渉計2と被測定物10の位置関係及び干渉計2において測定光を分割した二つの光束間の光路差を変えて得た3次元状の白色干渉縞を光路差に関して周波数変換することにより、被測定物の所定点の分光情報を表す相互スペクトル密度を求め、相互スペクトル密度を干渉計2の移動量について周波数変換することにより、被測定物上の所定点からの光の波面を決定する。
(もっと読む)
干渉法により二次元光路分布の絶対測定を行う装置
二次元光路分布の絶対測定を行う装置であって、本装置は、複数の波長を有する光を物体(26)に照射する光源(4)と、物体の少なくとも一部分の画像を形成する干渉計(12)であって、この少なくとも一部分の画像は広帯域干渉図形を含む、干渉計(12)と、干渉計と光通信を行い、広帯域干渉図形を複数の狭帯域二次元干渉図形(72、74、76)にスペクトル的に分離するハイパースペクトル撮像装置(30)と、狭帯域干渉図形を空間的に位置合わせする位置合わせ装置(38)と、各狭帯域干渉図形内の対応する画素から一次元強度信号を抽出する抽出装置と、物体上の各点における周波数を、各点に関連付けられた一次元強度信号から計算する計算装置(100)と、を含む。 (もっと読む)
画像処理装置
【課題】多重解像度画像を用いた対応点探索における処理コストを抑制しつつ、対応点探索の精度や信頼度を向上できる技術を提供する。
【解決手段】原基準画像と原参照画像とを取得する画像取得手段と、前記原基準画像と前記原参照画像のそれぞれの多重解像度画像を生成する多重解像度画像作成手段と、注目基準画像上の注目点に対応する対応点の探索処理を行うための探索基準点を、注目参照画像に設定する探索基準点設定手段と、前記対応点を探索する対応点探索手段と、前記探索処理が下位の階層から上位の階層に向けて実行されるように前記探索基準点設定手段と前記対応点探索手段とを制御する制御手段と、を備える画像処理装置であって、前記対応点探索手段は、前記対応点をサブピクセル分解能で探索するとともに、前記探索基準点設定手段は、探索された前記対応点に基づいて、注目参照画像の1つ上位階層の参照画像上に探索基準点を設定する。
(もっと読む)
立体結像レンズモジュール
【課題】本発明は、コストが低く、体積が小さく、且つ便利に携帯することができる立体結像レンズモジュールを提供することを目的とする。
【解決手段】立体結像レンズモジュールは、被写体の立体映像を結像することに用いられ、点光源及び2次元スキャン装置を含み、前記点光源からの光線は所定のパターンを形成し、且つ前記2次元スキャン装置の駆動によって、前記被写体をマトリックス形式にスキャンする点光源スキャン装置と、前記被写体に反射される光線を受けて結像することに用いられる映像感知モジュールと、前記映像感知モジュールからの映像情報を受信し、且つ前記映像情報をフーリエ変換して、前記被写体の深さ情報を獲得するデータ処理ユニットと、を備える。
(もっと読む)
走査干渉分光を用いた複雑な表面構造のプロファイリング
【課題】表面高さ情報および/またはその複雑な表面構造についての情報を、抽出すること。
【解決手段】試験対象物の第1の表面箇所に対する走査干渉分光信号から導出可能な情報と試験対象物の複数のモデルに対応する情報とを比較することを含む方法であって、複数のモデルは、試験対象物に対する一連の特性によってパラメータ化される方法。比較される導出可能な情報は、試験対象物の第1の箇所における走査干渉分光信号の形状に関する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】2以上の画像の間において対応点を迅速且つ精度良く探索することが可能な技術を提供する。
【解決手段】同一の被写体を各々とらえた第1画像と第2画像とを含む複数の画像を取得し、第1画像に対して第1および第2探索基準点を含む複数の探索基準点を設定する。次に、第2画像について第1探索基準点に対応する第1対応点と第2探索基準点に対応する第2対応点とを探索することで、第1画像と第2画像との間における第1探索基準点に係る第1視差および該第1視差に係る第1信頼度と第2探索基準点に係る第2視差および該第2視差に係る第2信頼度とを導出する。そして、第1視差、第1信頼度、第2視差、および第2信頼度に基づき、第1画像において第1探索基準点と第2探索基準点とによって挟まれる演算基準点について、第1画像と第2画像との間における推定視差を決定する。
(もっと読む)
周辺監視装置
【課題】車両に搭載されて周囲の対象物体との衝突可能性を判定する周辺監視装置において、処理の高速化(フレームレートの向上)を実現する。
【解決手段】ステレオカメラ11,12で得られた時系列画像から時系列情報算出部21で対応点探索処理によって2次元オプティカルフローを算出すると、先ず対象物体候補領域抽出部22が対象物体が存在する可能性の高い候補領域を抽出する。その後、3次元情報取得部23が、ステレオカメラ11,12の画像から前記対象物体の候補領域の3次元情報を取得し、得られた3次元情報と、該周辺監視装置1との位置関係から、衝突判定部24が衝突可能性を判定する。したがって、複雑な物体認識処理や道路モデルなどを必要とせず、時系列画像から算出された2次元オプティカルフローのみを用いて対象物体の候補領域を限定し、3次元での衝突判定を行うことで、処理速度を速くできる。
(もっと読む)
OCTによる断層画像の形成方法
【課題】高解像度で撮像することが必要な部分だけ他の部分よりも分解能を上げることによって、撮像時間の短縮化を図り、効率的な断層画像の取得が可能となるOCTによる断層画像の形成方法を提供する。
【解決手段】被検査物の断層画像を形成するOCTによる断層画像の形成方法であって、
前記被検査物に対する撮像に際し、高解像度で撮像することが必要な部分に対して、その必要性に応じて他の部分よりも高い解像度で撮像する工程を有し、
前記高解像度で撮像することが必要な部分を撮像するときには、前記光源からの光によるビームのスポット径を前記他の部分を撮像するときよりも小さいスポット径に設定し、
深さ方向に対して、前記他の部分を撮像するときよりも多い撮像回数で撮像する構成とする。
(もっと読む)
表面特性を用いて対象物の特定および/または認証をするための方法、および、その方法に使用するセンサ
本発明の主題は、表面特性を用いて、対象物の特定および/または認証をするための方法である。本発明のさらなる主題は、表面を走査するためのセンサである。 (もっと読む)
波形解析装置、コンピュータ実行可能な波形解析プログラム、干渉計装置、パターン投影形状測定装置、及び波形解析方法
【課題】データ範囲の有限性などに起因するリップル状の解析誤差を抑える。
【解決手段】フーリエ変換法を利用した解析処理を入力波形へ施すことにより、その入力波形に含まれる特定成分を算出する本解析手順(S11)と、前記入力波形の特定成分の設計値を含む基礎データに基づき、前記入力波形のモデルであるモデル波形を作成するモデル作成手順(S14)と、前記モデル作成手順で作成されたモデル波形へ前記本解析手順と同じ解析処理を施すことにより、そのモデル波形に含まれる特定成分を算出するテスト解析手順(S16)と、前記テスト解析手順で算出された特定成分と前記モデル波形に実際に含まれる特定成分との差異を、前記テスト解析手順の特定成分に関する解析誤差として算出する誤差算出手順(S17)と、前記誤差算出手順で算出された解析誤差に基づき前記本解析手順で算出された特定成分を補正する補正手順(S21)とを含む。
(もっと読む)
波形解析装置、コンピュータ実行可能な波形解析プログラム、干渉計装置、パターン投影形状測定装置、及び波形解析方法
【課題】データ範囲の有限性などに起因するリップル状の解析誤差を抑える。
【解決手段】フーリエ変換法を利用した解析処理を入力波形へ施すことにより、その入力波形に含まれる特定成分を算出する本解析手順(S11)と、算出した特定成分を含む基礎データに対して平滑化処理を施すことにより、前記入力波形のモデルであるモデル波形を作成するモデル作成手順(S14)と、前記モデル作成手順で作成したモデル波形へ前記解析手順と同じ解析処理を施すことにより、そのモデル波形に含まれる特定成分を算出するテスト解析手順(S16)と、前記テスト解析手順が算出した特定成分と前記モデル波形に実際に含まれる特定成分との差異を、前記テスト解析手順の特定成分に関する解析誤差として算出する誤差算出手順(S17)と、前記誤差算出手順で算出した解析誤差に基づき前記本解析手順で算出した特定成分を補正する補正手順(S21)とを含む。
(もっと読む)
表面位置の測定装置、露光装置及びデバイス製造方法
【課題】 干渉光の強度のピーク及びコントラストを最適化し、高速かつ高精度に被測定物の表面位置を測定できる測定装置を提供する。
【解決手段】 本発明は、光源から出射され分岐された光のうちの、参照面で反射された参照光と被測定物の表面で反射された測定光とによる干渉光の強度に基づいて前記被測定物の表面位置を測定する測定装置であって、測定光の光量を検出する検出部と、参照光の光量と前記検出部により検出された測定光の光量とに基づいて算出される干渉光の強度が目標範囲に入るように前記光源の光量を制御する制御部と、を備える。
(もっと読む)
三次元形状測定装置、三次元形状測定方法及びコンピュータプログラム
【課題】少ない投影パターン数で、形状変化が急激な計測対象や不連続な計測対象の高精度な形状計測を可能とする。
【解決手段】三次元形状計測装置は、三次元形状計測を行う計測対象に周期性パターンを投影するパターン投影手段と、前記パターンを投影された計測対象の撮影画像を撮影する撮影手段と、前記計測対象の撮影画像からパターンの位相情報を算出する位相情報算出手段と、前記計測対象の撮影画像からパターンのデフォーカス量を算出するデフォーカス量算出手段とからなり、前記パターンの位相情報とパターンのデフォーカス量に基づき、計測対象の三次元形状を計測する。
(もっと読む)
161 - 180 / 544
[ Back to top ]