
Fターム[2F065QQ16]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | フーリエ変換;逆フーリエ変換 (544)
Fターム[2F065QQ16]に分類される特許
101 - 120 / 544
画像処理システム及び位置測位システム
【課題】位置決めのための風景画像認識技術に利用される効果的な参照データの作成に適した画像処理システムとそのような参照データを用いた位置測位システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像に基づいて風景画像の認識を行う際に利用される参照データを作成する画像処理システム。車両からの風景を撮影した撮影画像の類似度を算出して、各撮影画像に類似度を付与し、互いに類似度が相違する処理対象撮影画像を有用撮影画像として選択し、この有用撮影画像から画像特徴点データを生成して、参照データとしてデータベース化する。
(もっと読む)
形状測定方法及び装置並びに歪み測定方法及び装置

【課題】高精度且つ高感度の形状測定を実現できるフリンジ投影法による形状測定方法及び装置、並びに歪み測定方法及び装置を提供する。
【解決手段】光源部11からの光22を格子板12に照射し、格子板12を透過した光23を被測定物14上に格子像として投影し、その格子像を撮影して格子像の歪みから被測定物14の3次元形状を計算して数値化する。三次元形状の数値化は、格子像の画像データ取り込みステップ、取り込んだ画像データの二次元フーリエ変換ステップ、n次のピーク信号取り出しステップ、位相分布を含む信号の逆フーリエ変換ステップ、及び三次元形状数値化ステップをその順で含む。
(もっと読む)
表面の干渉分析のための方法およびシステムならびに関連する応用例
【課題】表面の干渉分析の方法とシステムを提供する。
【解決手段】物体の空間的特性を決定するための方法には、2つ以上の界面を含む測定物体からの走査低コヒーレンス干渉信号を得ることが含まれる。走査低コヒーレンス干渉信号には、2つ以上の重なり合う低コヒーレンス干渉信号(それぞれ個々の界面に起因する)が含まれる。低コヒーレンス干渉信号に基づいて、少なくとも1つの界面の空間的特性が決定される。場合によって、決定は、低コヒーレンス干渉信号のサブセットに基づき、信号の全体に基づくのではない。あるいはまたは加えて、決定は、低コヒーレンス干渉信号を得るために用いられる干渉計の機器応答を示す場合があるテンプレートに基づくことができる。
(もっと読む)
焦点ズレ検出装置、焦点ズレ検出方法およびプログラム
【課題】探傷中においても撮像装置の焦点ズレを検知することができ、判定精度の劣化による不良品の流出等を防止する焦点ズレ検出装置を提供する。
【解決手段】本発明の焦点ズレ検出装置は、搬送される被検査体の表面を撮像装置により撮像した画像データに基づいて、表面欠陥を検査する表面欠陥検査装置において、撮像装置の焦点ズレを検出する。かかる焦点ズレ検出装置は、画像データの画像信号を2次元配列された周波数成分に変換する変換演算を行う演算部と、画像データの周波数成分の2次元配列を、所定の規則に基づいて、1次元配列に変換する配列変換部と、1次元配列に変換された周波数成分の一部によって形成される波形の傾きに基づいて、撮像装置の焦点ズレの有無を判定する焦点ズレ判定部と、を備えることを特徴とする。
(もっと読む)
画像処理装置および干渉計測定システム
【課題】画像処理装置および干渉計測定システムにおいて、干渉計の画像表示のための装置構成を簡素化し、干渉縞計測の作業性を向上することができることができるようにする。
【解決手段】画像処理装置1は、アライメント用画像を撮影するアライメントカメラ6と、干渉縞画像を撮影する干渉縞カメラ7とを接続し、これらから送信される画像データを伝送する接続端子部4と、伝送された画像データのうち、アライメント用画像および干渉縞画像のいずれかを選択するカメラ切替スイッチ3Bと、選択された画像データによる画像を表示する表示部2と、干渉縞画像の画像データを解析する画像処理部と、カメラ切替スイッチ3Bによって干渉縞画像の画像データが選択されたときに、画像処理部によって解析された解析結果を干渉縞画像とともに表示部2に表示する装置制御部と、を備える。
(もっと読む)
厚さ又は温度の干渉測定装置
【課題】測定物の厚さや温度測定を、非接触により高精度で行うこと。
【解決手段】干渉測定装置は、スーパーコンティニューム光を放射する光源10と、SC光を測定光と参照光とに分割する光ファイバカプラ11と、ミラー12と、ミラー12の位置を調整する位置調整装置13と、測定光と参照光との干渉強度の波長スペクトルを測定する受光装置14と、干渉強度のスペクトルを空間座標に逆フーリエ変換して、干渉強度の空間分布を求め、その空間分布から測定物の厚さや温度を測定する干渉波形解析装置15と、によって構成されている。
(もっと読む)
光波干渉計測装置
【課題】一般の湿潤環境に適用可能な屈折率補正機能を有する光波干渉計測装置を提供する。
【解決手段】光波干渉によって参照光路と被検光路の幾何学的距離差を計測する計測装置であって、測長用光源からの光であって参照面で反射した光と被検面で反射された光の干渉信号の位相を検出する位相検出部と、前記測長用光源の波長とは異なる非測長用光源からの光であって前記参照面で反射した光と前記被検面で反射された光の強度を検出する強度検出部と、前記位相と前記測長用光源の波長から算出される光路長と、前記非測長用光源の光の強度情報から算出される前記被検面と前記参照面の間の水蒸気圧分布の平均値とから前記幾何学的距離を算出する解析部を有することを特徴とする。
(もっと読む)
半導体ウェハの表面検査システム及び表面検査方法
【課題】半導体ウェハ表面に存在するソーマークなどの線状の凹凸について、短時間かつ容易に検査が可能であり、検査に対する振動の影響を低減できる技術を提供する。
【解決手段】半導体ウェハWの表面の全域に光源装置2によって斜め方向から光を照射し、CCDカメラ4で半導体ウェハW全体を撮影する。これにより、半導体ウェハWの各ポイントからの前記照射光の反射光または散乱光の強度を検出する。取得された光の2次元的な強度分布に基づいて、半導体ウェハWの表面に生成されたソーマークなどの凹凸を検出し、またはその大きさを測定する。
(もっと読む)
光断層画像表示システム
【課題】モードロックレーザを用い高速で波長を掃引しても高コヒーレンス性を保つ光源を用いて光断層画像表示システムの分解能、および深達度を向上させること。
【解決手段】波長走査型レーザ光源10に一対の回折格子32,33を対向して配置し、これを分散素子として用いる。この分散素子に半導体光増幅器35を接続し、モードロック信号発生部38よりクロック信号を与えて光信号を増幅する。このクロック信号のクロック周波数を変化させることによってクロック周波数に応じて発振波長を走査することで、高速で波長を可変でき、この光源を用いることで光断層画像表示システムの分解能、および深達度を向上させることができる。
(もっと読む)
タイヤの形状測定方法および形状測定装置
【課題】タイヤの一周分の厚みを、短時間で正確に計測することができるタイヤの形状測定方法および形状測定装置を提供する。
【解決手段】タイヤ外面および内面の画像データからタイヤの外面形状データおよび内面形状データを検出する外面および内面形状測定工程と、外面および内面形状データ中のタイヤ周方向に沿う一周分の凹凸をフーリエ変換してそれぞれの一次の波形成分を取り出す外面および内面一次成分抽出工程と、双方の波形成分のタイヤ周方向位置を合わせてそのタイヤ周方向位置を調整する周方向位置調整工程と、第一および第二のカメラの配置角度と位置情報とから外面形状データと内面形状データとのタイヤ半径方向断面内位置を調整する断面内位置調整工程と、調整されたタイヤ周方向位置およびタイヤ半径方向断面内位置に基づき、外面形状データと内面形状データとを合成する形状データ合成工程とを含むタイヤの形状測定方法である。
(もっと読む)
チャックテーブルに保持された被加工物の計測装置およびレーザー加工機
【課題】チャックテーブルに保持された半導体ウエーハ等の被加工物の上面位置を計測する計測装置および計測装置を装備したレーザー加工機を提供する。
【解決手段】発光源からの光を第1の経路に導くとともに第1の経路を逆行する反射光を第2の経路に導く第1の光分岐手段と第1の経路に導かれた光を平行光にし、この平行光を第3の経路と第4の経路に分ける第2の光分岐手段と第3の経路に配設され第3の経路に導かれた光を被加工物に導く対物レンズと、第2の光分岐手段と対物レンズとの間に配設された集光レンズと、第4の経路に導かれた平行光を反射し、この反射光を逆行せしめる反射ミラーと、第2の経路に導かれた反射光を回折する回折格子と、回折光の所定の波長域における各波長の逆数の光強度を検出するイメージセンサーと、検出信号からの分光干渉波形と理論上の波形関数に基づくフーリエ変換理論による波形解析を実行する制御手段とを具備している。
(もっと読む)
光透過性を有する被測定物の形状測定方法
【課題】光透過性を有する被測定物の形状を、精度良く迅速に測定する方法を提供する。
【解決手段】光照射手段1と光検出手段2を被測定物3の表面3a側に配置し、既知形状の反射面4aを有する反射手段4を被測定物3の裏面3b側に配置する。次に光照射手段1から測定光5を表面3aに照射する。測定光5のうち、表面3aで反射した第1の反射光8と、被測定物3を透過して裏面3bで反射した第2の反射光9と、被測定物3内を透過した透過光5のうち反射面4aで反射された第3の反射光10とを含む反射干渉光7を光検出手段2で検出する。そして反射干渉光7の光強度スペクトルを分析し、第1および第2の反射光8、9からなる第1の干渉光成分から被測定物3の厚みtを算出し、第2および第3の反射光9、10からなる第2の干渉光成分から裏面3bと反射面4a間の距離dを算出し、厚みtと距離dに基づいて被測定物3の形状を求める。
(もっと読む)
エレベーターのロープテンション測定装置
【課題】簡単な構成で設置及び調整が容易であり、且つ、主ロープのテンション測定を自動で行うことができるエレベーターのロープテンション測定装置を提供する。
【解決手段】エレベーター昇降路2内を昇降するかご1と、かご1を昇降路2内で懸架する複数本の主ロープ4とを備えたエレベーター装置に、主ロープ4を側方から撮像するための撮像装置7を設置する。そして、この撮像装置7によって撮像された画像情報に基づいて、各主ロープ4の振動周波数を演算する。
(もっと読む)
波長掃引光源装置及びこれを用いた撮像装置
【課題】 所望の波長範囲で、安定的に発振可能で且つ高速に波長掃引可能な光源装置を提供する。
【解決手段】 発振波長を連続的に変化可能な波長掃引光源装置であって、共振器内に、光を増幅させる光増幅媒体と、該光増幅媒体より放出される光を波長に応じて分散させる第一の手段と、第一の手段により分散した波長の異なる光束同士を平行化させる非集光光学素子で構成された第二の手段と、第二の手段により平行化した光束から所定波長の光束を選択する選択手段と、を備え、前記選択手段により選択された前記所定波長の光束を前記光増幅媒体に帰還させる波長掃引光源装置。
(もっと読む)
干渉センシングおよび画像取得システムのための強度雑音を低減する方法および装置
本発明の態様は、部分的に、電磁放射光源および干渉原理を用いる光干渉断層撮影システムなどのデータ収集システムにおける強度および/またはパターンライン雑音の低減のための方法、装置、およびシステムに関する。1つの実施形態において、雑音は強度雑音またはパターンライン雑音であり、光源は掃引レーザーなどのレーザーである。1つの実施形態においては、アナログまたはデジタルフィードバックネットワークと併せて、1つ以上の制御信号に応答する1つ以上の減衰器を用いることができる。 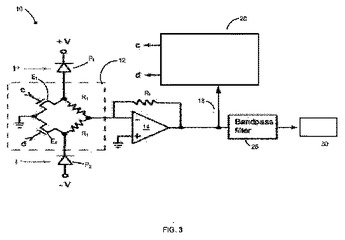 (もっと読む)
(もっと読む)
舗装路面のクラックの抽出と損傷レベルの評価方法
【課題】舗装道路のひび割れ検出は、現場を撮影した画像を検査所に持ち帰り、分析機器を使って分析・評価しているが、全長が何百キロメータ以上にも及ぶ道路のひび割れ検出には処理画像の量が膨大で人的作業に適さず、評価も技術者の経験による主観的判断によっているため、客観的かつ定量的に行うことが不可能である。
【解決手段】本発明に係る舗装路面のクラックの抽出と損傷レベルの評価方法は、遺伝的プログラミングによる並列型画像フィルタ自動生成システムにサイズ依存型交叉を導入して複数の実舗装画像からクラック(1)の抽出が困難と思われる箇所をフィルタ構築の訓練データに選定採用することで様々なタイプの画像からクラックの抽出用画像フィルタ(4)を自動的に構築する。そして、評価対象舗装領域の画像全体を格子状に分割した個々のブロック(6)に該抽出用画像フィルタ(4)を適用して評価する。
(もっと読む)
車両周辺監視装置
【課題】ピッチ検出器を用いることなく、単眼カメラによる構成においてもピッチング補正を行うことができる機能を備えた車両周辺監視装置を提供する。
【解決手段】今回の制御周期における撮像画像と前回の制御周期における撮像画像間の位相相関関数を求めて、該位相相関関数を逆フーリエ変換した関数において実部の大きさが最大となる複素数要素の位置に基づいて、今回の制御周期での撮像画像の前回の制御周期での撮像画像からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値PYを算出するピッチング補正値算出部12と、今回の撮像画像に対して、ピッチング補正値PYによる位置補正を行った補正画像f3を生成する補正画像生成部13と、補正画像f3から対象物を検出する対象物検出部14とを備える。
(もっと読む)
光干渉計測方法および光干渉計測装置
【課題】光の干渉現象を利用して検出した干渉光(光ビート信号)が正規の像を取得させるものであるのか折り返し像を取得させるものであるのかを簡易に判定することができる光干渉計測方法を提供する。
【解決手段】光源ユニットから射出された光を測定光と参照光とに分割し、前記参照光と、前記測定光が照射された測定対象11から反射または後方散乱した光と、が干渉した干渉光を検出し、前記参照光の光路に設けられた光路長可変機構13を駆動させて前記参照光の光路長を変化させ、前記参照光の光路長の変化に応じた前記干渉光の変化に基いて、検出された前記干渉光に基づく画像が正規の像か折り返し像かを判定し、その判定の結果に基いて前記干渉光から前記測定対象を計測する。
(もっと読む)
撮影経路計算装置
【課題】未知空間内のランドマークや景観の特徴によらず、ロボットの移動に伴うカメラの撮影経路を正確に算出できる撮影経路計算装置を提供する。
【解決手段】撮影点の全周囲の全方位画像を、画像座標系の横軸が方位であり、画像座標系の縦軸が撮影装置4による撮影方向に対するピッチ角である画像に変換して、当該変換後の画像の一定の方位毎にピッチ角で規定される上下方向の画素値の周波数成分を算出し、ロボット1の移動に伴って撮影装置4に撮影された各全方位画像について周波数成分を基に方位を照合することにより、全方位画像間の相対方位を推定して、推定された全方位画像間の相対方位に基づいて、ロボット1の移動に伴う撮影装置4の撮影経路を算出する。
(もっと読む)
変位計測装置、方法およびプログラム
【課題】所定の位置における微小な変位を高精度かつ高効率で自動的に計測する装置、方法およびプログラムを提供する。
【解決手段】変位計測装置は、所定の位置に設けられた変位計測用の格子を含む変位計測用画像を撮影する撮影部と、変位計測用画像から格子の領域を検出して該格子領域の画像を抽出する格子領域検出部と、抽出した格子領域の画像に対してサンプリングモアレ法により格子領域の画像に対するモアレの位相分布を導出する位相分布導出部と、位相分布から求められた所定の位置における変位前後の位相差と、予め定められた格子ピッチとから所定の位置における変位を決定する変位決定部とを備える。
(もっと読む)
101 - 120 / 544
[ Back to top ]