
Fターム[2F065QQ29]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の特定位置の検出 (2,005) | 極大値又は極小値をとる位置 (1,089)
Fターム[2F065QQ29]に分類される特許
1 - 20 / 1,089
三次元座標測定装置、三次元座標測定方法、及びプログラム
線状体の直径及びスリットの幅寸法の測定方法
表面処理状況モニタリング装置
光干渉システム、基板処理装置及び測定方法
傾斜測定装置およびその方法
車体寸法計測装置及び車体寸法計測方法
3次元計測装置およびそれに用いられる照明装置
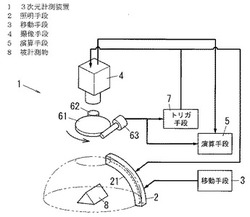
【課題】被計測物を精度よく計測することができる3次元計測装置およびそれに用いられる照明装置を提供する。
【解決手段】3次元計測装置1は、被計測物8に円偏光を照射する照明手段2と、照明手段2を移動させる移動手段3とを備える。また、3次元計測装置1は、被計測物8の被照射面からの反射光を受けて上記被照射面を撮像する撮像手段4と、撮像手段4で撮像された撮像画像を用いて反射光の偏光状態を検出し、被計測物8の被照射面の向きを求める演算手段5とをさらに備える。照明手段2は、円偏光を被計測物8の一部に照射する。移動手段3は、被計測物8において被照射面の位置が変わるように照明手段2を移動させる。
(もっと読む)
光学式変位センサ

【課題】ノイズ光が入射した場合に誤った計測が行われるのを防止して、計測の精度を確保する。
【解決手段】検出用の光を投光する投光部101と、投光された光に対する反射光を受光する受光部102と、変位を計測する計測処理部として機能するCPU10とを具備するセンサ1のCPU10に、受光量の変化を表すパラメータまたは受光量の増減に応じて調整される感度を示すパラメータの値があらかじめ定めた許容範囲に入るか否かを判別する判別手段の機能を付与する。CPU10は、判別対象のパラメータの値が許容範囲に入っていると判別した場合には、計測処理を行って結果を出力するが、判別対象のパラメータの値が許容範囲を逸脱すると判別した場合には、計測結果が出力されないように制御する。
(もっと読む)
トレンチ深さ測定装置及びトレンチ深さ測定方法並びに共焦点顕微鏡
【課題】トレンチ幅が照明光の波長と同程度の高アスペクト比のトレンチの深さを測定できるトレンチ深さ測定装置を実現する。
【解決手段】照明光学系は、ライン状の照明ビームを発生する光源装置1〜4及びライン状の照明ビームを前記試料に向けて投射する対物レンズ6を有し、光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成する。ライン状の瞳パターンは対物レンズを介してトレンチが形成されている試料表面7にトレンチと交差するようにライン状の照明エリアを形成する。また、照明光として直線偏光した照明光を用い、その電界ベクトルの方向は、トレンチの長手方向に対してほぼ平行に設定する。直線偏光した照明光の電界ベクトルの方向をトレンチの長手方向に設定することにより、トレンチにおける光損失が減少し、トレンチの内部に照明光を進入させることでき、高精度な深さ測定が可能になる。
(もっと読む)
形状測定装置
【課題】被測定物に対する面方向の分解能や測定位置の変更を容易に行うことができる形状測定装置を提供する。
【解決手段】光源10と、光源10からの光を2つの光束に分割して、一方の光束を被測定物Tに照射し、他方の光束を参照ミラー40に照射させると共に、これらから反射された光を合波させるスプリッタ20と、スプリッタ20によって合波された光により得られる画像を撮像するCCD50と、2つの傾き状態に制御される複数の微小ミラーを有するDMDと、複数の微小ミラーを制御して被測定物Tや参照ミラー40への照射光等を絞り込み、その状態で撮像された画像に基づき、測定点の高さを測定する制御手段と、を備えることを特徴とする。
(もっと読む)
印字装置および印字方法
【課題】金属コイルを固縛するバンドに跨って印字することなく、固縛後の金属コイルの表面に対して、印字レイアウトの制約を遵守しつつ情報を的確に印字できること。
【解決手段】本発明の一態様にかかる印字装置1は、バンド16によって固縛された金属コイル15に印字する装置であり、検出部2および印字レイアウト決定部8を備える。検出部2は、金属コイル15の印字対象領域の中から、バンド16の位置等を含む印字不可領域と、この印字不可領域以外の印字可能領域とを検出する。印字レイアウト決定部8は、指示された制約を加味した印字レイアウトと印字可能領域との適合度を所定の評価関数によって評価して、この制約を遵守しつつ印字可能領域に文字群を印字できる印字レイアウトの候補を複数選出し、選出した複数の候補のうち、文字群の印字面積が最大となる候補を印字レイアウトとして決定する。
(もっと読む)
計測装置
【課題】コストの増加を抑えながら参照面と被検面との間の光路長差の変化に起因する計測誤差を低減し、参照面と被検面との間の距離を計測する計測装置を提供する。
【解決手段】周波数を走査可能なn(n=2以上の整数)個の光源と、前記n個の光源からのそれぞれの光を分割し、参照面と被検面とに入射させる分割素子と、前記参照面で反射された光と、前記被検面で反射された光との干渉により形成されるn個の干渉光を検出して干渉信号を出力する検出部と、前記距離を求める処理部と、前記処理部は、前記n個の光源のうち1つの第1光源からの光の周波数を第1方向に第1走査速度で走査するように制御し、且つ、前記n個の光源のうち他の1つの第2光源からの光の周波数を第1方向とは逆の第2方向に前記第1走査速度とは異なる第2走査速度で走査するように制御し、前記n個の光源を制御している間の前記干渉信号に基づいて、前記距離を求める。
(もっと読む)
タイヤ形状検査方法、及びタイヤ形状検査装置
【課題】凹凸マーク上に重なるように凹凸欠陥が存在する場合にも、凹凸マークの高さ分だけを差し引いて凹凸欠陥のみの高さを算出・取得する。
【解決手段】凹凸マークが形成されたサイドウォール面を有するサンプルタイヤの画像を用いて、検査タイヤのサイドウォール面の形状欠陥を検査するタイヤ形状検査方法において、次の工程を実行する。まず、ティーチング作業工程として、サンプルタイヤのサンプル原画像において、凹凸マークの境界線を検出し、境界線を示すマスク画像を生成し、サンプル原画像からマスク画像に示された境界線に対応する領域を除き、残りの領域の高さを1又は複数のオフセット値で表す高さオフセット画像を生成する。次に、検査作業工程として、検査タイヤの検査画像から、高さオフセット画像を差し引くと共に、マスク画像が表す境界領域を除去し、得られた凹凸除去画像に基づいて、検査タイヤのサイドウォール面の形状欠陥を検査する。
(もっと読む)
回転角度計測装置及び方法
【課題】計測対象の回転体の回転角度を、計測センサが非接触で、計算コストを抑え且つ高精度で計測する。
【解決手段】回転体1の回転角度と一意的に対応するマーカ模様の境界線を有する螺旋状マーカ2を回転体1に設置し、ラインセンサ4で螺旋状マーカ2を撮影し、解析装置5によって、予め求めておいたマーカ模様の境界線位置から回転体1の回転角度を計算する式を基に、ラインセンサ4で撮影した画像から回転体1の回転角度を計測する。
(もっと読む)
形状測定装置
【課題】毛髪表面の断面形状(表面輪郭形状)、毛髪表面の段差を高精度に測定できる形状測定装置の実現。
【解決手段】測定すべき毛髪に向けて走査ビームを投射する対物レンズ13を含み、毛髪からの反射光を受光して毛髪表面の共焦点画像を撮像する共焦撮像装置と、複数の毛髪を、その長手軸線方向であるX軸方向に支持すると共にX軸と直交するY軸方向そって所定の間隔で整列支持する毛髪支持手段15と、X軸方向及びY軸方向に移動可能で、前記毛髪支持手段を支持するステージ14とその駆動手段と、対物レンズとステージとの間の相対距離を変化させる手段16と、共焦点撮像装置から出力される画像信号に基づき、毛髪表面の断面画像情報及び/又は毛髪表面に存在する段差の大きさを示す段差情報を出力する信号処理装置10とを有する。ステージは、測定される毛髪の本数及び測定点の座標情報に基づき、ジグザグ状に設定された移動経路に沿って移動する。
(もっと読む)
多波長干渉計、計測装置および計測方法
【課題】 被検面が傾いていても測定精度を悪化させることのない多波長干渉計を提供する。
【解決手段】 波長が互いに異なる少なくとも2つの光束を参照光と被検光とに分割し、分割された参照光の周波数と被検光の周波数とを異ならせ、被検光と参照光とを干渉させる干渉計において、干渉光を複数の光束に分割する分割部を有し、分割された複数の光束を各波長について検出する。
(もっと読む)
熱源位置角度検出方法
【課題】熱源の大きさが赤外線カメラ1画素の検出範囲よりはるかに小さな場合であっても、赤外線カメラの画素数を増やすことなくカメラから熱源までの位置角度を精度良く求める。
【解決手段】検出範囲の最も赤外線カメラから遠くにあり、1画素の検出範囲よりもはるかに小さな熱源であっても、赤外線カメラのレンズの焦点をずらし、3画素に赤外線が入射させ3画素が出力するデータの大小を比較することにより精度の高い熱源の角度検出を行う。
(もっと読む)
3次元座標取得装置、カメラ姿勢推定装置、プログラム
【課題】カメラ姿勢の推定精度を向上させるとともに、処理負荷を軽減させる。
【解決手段】3次元座標取得装置100は、カメラによって撮像された立体対象物の撮像画像から当該カメラのカメラ姿勢を推定する際に用いられる前記立体対象物の3次元座標を取得する3次元座標取得装置であって、前記撮像画像から、画像平面内の特徴点を検出する特徴点検出部111と、前記カメラの焦点及び前記画像平面内の特徴点を通過する直線の方程式と、前記立体対象物の方程式とから、前記直線と前記立体対象物との交点を算出し、前記特徴点の3次元座標として取得する3次元座標取得部113とを備える。
(もっと読む)
光ファイバの曲率の測定方法
【課題】光ファイバの長手方向の曲率変動を容易かつ高精度に測定する方法を提供する。
【解決手段】光ファイバ1の一端を回転可能に把持し、該光ファイバ1の軸方向側面上の所定長離れた2点に対して、該軸方向にほぼ垂直かつ互いに平行な2本のビーム光線6を照射し、前記側面上で散乱した2つの散乱反射光7のそれぞれの代表位置を、該光ファイバ軸と平行な軸上の座標位置として計測し、得られた2つの座標位置の差分を求め、次いで、該光ファイバ1を所定角度回転させ、同様の操作を行って2つの座標位置の差分を求める操作を複数回繰返し、得られたそれぞれの角度での差分から正の値を取る振幅SAの代表値を求め、さらに振幅SAから曲率を求め、これを第1の光ファイバ長手位置の第1の曲率とし、さらに、光ファイバ1の長手方向にビーム光線を照射する位置を変え、同様の処理を複数回繰り返して前記第1から第mまでの曲率を求める。
(もっと読む)
干渉式膜厚計
【課題】オンライン測定において安定した測定ができる干渉式膜厚計を提供する。
【解決手段】投受光プローブ5から照射される光の焦点位置であり、かつ投受光プローブ5に入射する光の焦点位置である共通焦点位置を所定範囲内で走査させる焦点位置走査部7が設けられている。演算部13は、投受光プローブ5が受光した光の分光スペクトルデータを取得する分光データ取得部15と、分光スペクトルデータに基づいてパワースペクトルを算出するパワースペクトル算出部17と、パワースペクトルのデータに基づいて測定対象膜23の膜厚を算出する膜厚算出部19と、分光スペクトルデータもしくはパワースペクトルのデータ又はそれらの両方にしきい値を設け、しきい値以上のデータを抽出するデータ抽出部21と、を備えている。膜厚算出部19はデータ抽出部21が抽出したデータに対応する膜厚データを出力する。
(もっと読む)
1 - 20 / 1,089
[ Back to top ]