
Fターム[2F065QQ38]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 画像処理(1次元を含む) (5,599) | パターンマッチング (1,160)
Fターム[2F065QQ38]の下位に属するFターム
標準パターンとの (300)
Fターム[2F065QQ38]に分類される特許
121 - 140 / 860
通過者識別装置
【課題】規定の場所を通過する通過者の外観形状を計測することによって通過者の体型を類別し、結果的に住宅内などの少人数の範囲内で個人の特定を可能にする。
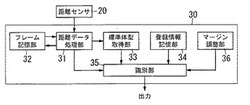
【解決手段】距離センサ20は、特定面を通過する通過者の外観形状を計測した距離データを出力する。距離データ処理部31は、距離センサ20から出力された距離データを用いて通過者の胴囲を推定する機能を備える。登録情報記憶部34は、識別対象の人物の外観形状を当該人物に対応付けて記憶している。識別部35は、距離データ処理部31で推定した胴囲、身長、肩幅を、登録情報記憶部34に照合し登録情報記憶部34に登録された人物のうち類似度が判定条件を満たす通過者を選択する。
(もっと読む)
接触可能性検知装置、接触可能性検知方法、及びプログラム

【課題】対象車両の自車両への接触の可能性の有無の判定精度を向上させる。
【解決手段】測距部11は、自車両と対象車両との間の距離の計測を行う。方位角変化率算出部12は、自車両に搭載されている車載カメラ2が対象車両を撮像して得た時系列の撮像画像に基づいて、当該対象車両の水平線方向の端部を当該自車両から見たときの方位角の時間変化率を算出する。そして、判定部13は、測距部11により計測された距離と、方位角変化率算出部12により算出された、前述の方位角の時間変化率とに基づいて、対象車両の自車両への接触の可能性の有無を判定する。
(もっと読む)
突き合わせ溶接部の溶接品質評価装置
【課題】溶接線の径が多様に変化する筒形状部材であっても、計測機器の種類を増やすことなく、また、計測作業時間の増大を極力抑制する。
【解決手段】カメラ装置4が第1の撮影位置での溶接裏波8の全周にわたる撮影を終了すると、その装置本体41は移動ステージ42により第2の撮影位置に移動され、同様に、溶接裏波8の全周にわたる撮影を行う。このときの第1の撮影位置から第2の撮影位置までの距離Lは、第1の撮影位置におけるカメラ装置4と、撮影対象地点である溶接裏波8との間の距離Hに応じて設定される。そして、これら2個所の撮影位置で撮影された画像情報により、三角測量の原理に基づき溶接裏波8の3次元形状情報が演算され、この3次元形状情報に基づき突き合わせ溶接部の溶接品質が評価される。
(もっと読む)
検査方法
【課題】本発明は検査方法に関し、より詳細には基板の検査方法を提供する。
【解決手段】基板を検査するために、まず、基板上に測定領域を設定し、続いて、測定領域に対する基準データ及び測定データを取得する。次に、測定領域内の所定の形状を含むようにブロック単位の複数の特徴ブロックを設定し、特徴ブロックのうちオーバーラップされる特徴ブロックをマージして統合ブロックを設定する。続いて、統合ブロック以外の特徴ブロック及び/または統合ブロックに対応する基準データと測定データとを比較して歪曲量を取得し、歪曲量を補償してターゲット測定領域内の検査領域を設定する。これにより、歪曲を補償した正確な検査領域を設定することができる
(もっと読む)
測定装置、位置測定システム、測定方法、較正方法及びプログラム
【課題】光を用いて物体までの距離を測定した測定結果において、所定の対象物に関する測定結果を特定することを可能とすること。
【解決手段】物体までの距離を光の照射によって測定点毎に測定する測定装置であって、測定点毎の距離情報と測定点毎の受光量情報とを取得する光学式距離測定部と、受光量情報において、光量が閾値を超える複数の測定点の並びが所定のパターンを形成している場合に、これらの測定点を、光源方向に対して多くの入射光を反射する反射面を有する対象物に対応する測定点であると判定する対象判定部と、判定された測定点の距離に基づいて、対象物の位置を測定する位置測定部と、対象判定ステップによって判定された測定点の距離に基づいて、自装置の基準点を原点とするローカル座標系における対象物の位置を算出し、同一の対象物のローカル座標系における位置及びグローバル座標系における位置に基づいて較正を行う較正部とを備える。
(もっと読む)
構造物モデル作成装置及びその方法
【課題】構造物の撮影画像に基づいて、構造物の面及び交線の位置を自動計測し、構造物モデルを自動的に作成し、表示可能な構造物モデル作成装置を提供する。
【解決手段】本発明による構造物モデル作成装置1は、コード付き標識CTを配置した測定対象面2の撮影画像3を取得する画像データ取得部4と、同一測定対象面に配置されたコード付き標識CTが同一グループに属するようにコード付き標識CTをグループ分けする標識グループ化部71と、測定対象面2の面方程式を算出する面方程式算出部72と、測定対象面間の交線を求める交線算出部74と、1つのグループに対応する測定対象面2に隣接する隣接測定対象面を特定する隣接面特定部73と、各グループに対応する測定対象面と隣接測定対象面との交線とを表示する表示部12とを備える。
(もっと読む)
3次元情報取得装置および3次元情報取得プログラム
【課題】対象と初期状態が異なる場合、この対象と初期状態との違いに基づく最適化処理の解の誤差を軽減すること。
【解決手段】位置姿勢逐次計測手段の初回起動時において最初に求めた初期フレームに対応する前記特徴点座標と前記カメラポーズ情報に対して、前記3次元座標および前記カメラポーズ情報の信頼度に応じて予め決められている加重値に基づく補正を行い、前記3次元座標の最適化を行う最適化処理手段を備えることを特徴とする。
(もっと読む)
容器の判別方法
【課題】画像処理によって廃棄物中に混在しているペットボトルを確実に判別可能とすることを課題とする。
【解決手段】被判別対象の撮影工程と、被判別対象の二値化画像を作成する二値化工程と、前記二値化画像から前記容器の口部分の形状を抽出する口部分形状抽出工程と、前記二値化画像の容器の口部分を含む画像部分を、容器を輪切りするように帯状に複数の区域に区分けする区域分け工程と、前記区域毎に容器に該当する領域の横幅をそれぞれ計測する横幅計測工程と、前記区域毎に、各区域において同一の方向に隣接する区域との前記横幅の差又は比率を求め、求めた値を判別値とする判別値演算工程と、前記判別値と事前に設定した閾値とを比較する形状判断工程とからなり、該形状判断工程での比較の結果に基づいて前記容器がペットボトルであるか否かを判別する、という技術的手段を講じた。
(もっと読む)
画像処理装置、方法およびそのプログラム
【課題】2次元画像からより正確な奥行きを生成する。
【解決手段】実施の形態によれば、検出部は、画像に含まれる物体を検出する。選択部は、検出された物体の性質に応じて物体の奥行きの情報のベースとするデプスモデルを選択する。セグメント部は、検出された物体の領域を画像から区分する。デプスマップ生成部は、画像の奥行きを表現するデプスマップを生成する。この際、デプスマップ生成部は、画像中の検出された物体の位置に対応するデプスマップ上の位置に、デプスモデルを配し、配されたデプスモデルの領域と物体の領域とを比較し、互いに重なり合わない位置に対して、補正後の奥行値を与える。
(もっと読む)
カメラポーズ情報算出装置およびカメラポーズ情報算出プログラム
【課題】GPS装置や地磁気センサ等の検出装置を用いずに、カメラの位置や姿勢を示すカメラポーズ情報を算出すること。
【解決手段】メディア媒体に対応する画像領域である位置情報埋込領域をカメラ画像データから抽出し、電子透かしにおいて電子的に埋め込まれた媒体位置情報を前記位置情報埋込領域から抽出するとともに、前記メディア媒体の位置情報が示す位置と対応する当該位置情報埋込領域の位置を示す座標を示す画像座標情報を前記位置情報埋込領域から抽出する位置情報抽出手段と、前記位置情報抽出手段が抽出した前記媒体位置情報および当該媒体位置情報に対応する前記画像座標情報に基づき、前記実空間中における前記カメラの位置と姿勢を示すカメラポーズ情報を算出するカメラポーズ情報算出手段と、を備えることを特徴とする。
(もっと読む)
動画追尾装置、動画追尾方法および動画追尾プログラム
【課題】線上での追尾点の動きを容易に把握することができるとともに、動画中での任意の時点の追尾点の状態を容易に観察することが可能な動画追尾装置、動画追尾方法および動画追尾プログラムを提供する。
【解決手段】複数フレームの画像データに基づいて表示部20の画像表示領域Taに画像が表示される。画像表示領域Taの画像内で追尾点および追尾線が設定されると、設定された追尾線上での追尾点の位置を識別する追尾動作が各フレームの画像において実行される。また、複数フレームの画像における追尾動作により識別された追尾点の位置の時間変化を示す追尾結果時間変化線が表示部20の画像表示領域Tbに表示される。画像表示領域Tbに表示される追尾結果時間変化線の時間軸方向の位置が現在表示位置バーLにより指定されると、指定された位置に対応するフレームの画像が画像表示領域Taに表示される。
(もっと読む)
測定装置及び測定方法
【課題】 パターン投影法により、測定対象物の画像特徴と距離画像とを同時に取得することを目的とする。
【解決手段】 測定装置に、測定対象に投影するパターン光特性の照明光を設定するパターン光特性設定部112と、前記照明光を前記測定対象に照射したときの反射光を測定する反射光測定部120と、測定された前記反射光から測定対象の物理特性に応じた画像特徴を抽出する画像特徴抽出部130と、前記画像特徴の局所領域ごとの分布特性を算出する特徴分布算出部180と、算出された前記局所領域ごとの分布特性に応じて、距離計測用のパターン光特性と、画像特徴抽出用のパターン光特性とを含む前記照明光のパターン光特性を制御するパターン光制御部170とを備える。
(もっと読む)
物体検出装置
【課題】ノイズを低減して移動物体の飛び出しを精度よく検出する物体検出装置を提供する。
【解決手段】物体検出装置1は、取得した画像情報から障害物を検出する障害物検出部21と、障害物検出部21が検出した障害物の近傍にある道路境界線を画像情報から取得する境界線取得部23と、境界線取得部23で取得した道路境界線の連続性を計算する連続性演算部25と、を備え、現在の画像情報について境界線取得部23で得られる道路境界線の連続性と、過去の画像情報について境界線取得部23で得られる道路境界線の連続性と、に基づいて障害物の飛び出し確率を算出する。
(もっと読む)
用紙搬送装置及び画像形成装置
【課題】本発明の目的は、短時間に高い精度で用紙の移動状態を非接触で検出できる移動状態検出手段を用紙搬送路に配設し検出された用紙の移動状態を変更して、用紙の片寄り、用紙の変形による画像不良を未然に防止可能にする用紙搬送装置及び画像形成装置を提供することにある。
【解決手段】本発明は、用紙搬送手段と、移動する用紙表面における異なる領域を互いに連続的に撮影して画像を出力する複数の撮像手段ISと、複数の撮像手段ISより出力された画像に基づき複数の領域における用紙の移動速度、用紙の移動量、もしくは用紙の移動方向を検出する移動状態検出手段IPと、移動状態検出手段IPの検出結果に基づき用紙搬送手段を制御する用紙搬送制御手段U100と、を備える用紙搬送装置20を提供して、上記課題の解決を達成可能にする。
(もっと読む)
表面が変化する対象物を3次元デジタル化する方法
【課題】表面が変化する対象物を3次元デジタル化する方法を提供する。
【解決手段】対象物4の複数の部分的表面を示す複数のカメラ画像を撮影して統合して、対象物4の部分的表面の3次元座標を決定する。複数のカメラ画像は、それぞれの端部において互いに重なり合う。マッチング法により対象物4の部分的表面の3次元座標を照合して統合する。カメラ画像の各々をサブフレーム(1.1〜1.8,2.1〜2.9,3.1〜3.9)に分割する。複数のサブフレームは、それぞれの端部において互いに重なり合い、隣接するカメラ画像に含まれるサブフレームに重複する。サブフレーム(1.1〜3.9)に対して、カメラ画像からそのサブフレームに関連する3次元座標を割り当てる。マッチング法によりサブフレーム(1.1〜3.9)の3次元座標を照合して統合する。この方法を数回繰り返して実行する。
(もっと読む)
搬送装置、記録装置および検出方法
【課題】ダイレクトセンシングにおける屈折率分布型レンズアレイの収差による搬送誤差を低減する搬送装置を提供する。
【解決手段】搬送ベルトに設けた複数の孤立点を含む検出用パターンと、前記検出用パターンを異なるタイミングで撮像して複数の画像データを取得する屈折率分布型レンズアレイを備えたイメージセンサと、前記複数の画像データの一の画像データから前記検出用パターンの一部であって、前記複数の孤立点のうち2以上の孤立点を含む1以上のテンプレート画像を切り出し、他の画像データから前記テンプレート画像と類似する領域を検索して前記搬送ベルトの移動状態を求める処理部と、を備え、前記2以上の孤立点は、一の孤立点と他の孤立点の結像位置が、前記屈折率分布型レンズアレイのレンズによる検出量ズレの周期性の半周期の位相差でずれた位置になるよう、前記検出用パターン上の一の孤立点と他の孤立点の位置を定めた、1組の孤立点を含む。
(もっと読む)
高さの計測装置
【課題】 対象物の高さを高精度かつ迅速に計測することが可能な計測装置を提供する。
【解決手段】 計測範囲内にある対象物の高さを計測する計測装置は、複数の波長を含む光を出射する光源と、軸上色収差を有する光学ユニットを含み、前記光源から出射された光を複数の光束に分割して、前記計測範囲を含むが異なる焦点範囲に前記複数の光束を前記光学ユニットによって集光させる第1光学系と、前記複数の光束について前記対象物の表面に焦点位置を有する波長を検出する検出部と、前記第1光学系と光路の一部を共有していて、前記第1光学系によって集光され前記対象物の表面で反射された前記複数の光束を前記検出部に導く第2光学系と、前記複数の光束から1つの光束を選択し、該選択された光束の前記検出部により検出された波長を用いて前記対象物の高さを算出する処理部と、を備える。
(もっと読む)
光学情報処理装置、光学情報処理方法、光学情報処理システム、光学情報処理プログラム
【課題】レーザースキャナを用いた得た三次元点群位置データを補完する三次元点群位置データを撮影画像から得る技術において、当該撮影を行う条件における撮影手段のキャリブレーションを効率よく簡便に行う。
【解決手段】第1の視点から建物120のレーザースキャンを行い、三次元点群位置データを得る。他方で、第2の視点から第1の視点でオクルージョンとなる建物120の部分のステレオペア画像の撮影を行う。そして、第2の視点で得たステレオ画像と第1の視点で得た三次元点群位置データとの対応関係を求めることで、当該三次元点群位置データを利用してのステレオペア画像撮影装置124のキャリブレーションを行なう。
(もっと読む)
ひずみ測定装置およびひずみ測定方法
【課題】本発明は、所定の特徴パターンの変形を考慮しつつ測定精度の向上と情報処理量の低減とを図ることができるひずみ測定装置およびひずみ測定方法を提供する。
【解決手段】本発明のひずみ測定装置Saおよび該方法では、試験体SMに外力を作用させる前後における試験体SMの外力作用前画像Aおよび外力作用後画像Bから、パターンのマッチングによって仮伸縮率が求められ、この求めた仮伸縮率を用いて外力作用前画像Aまたは外力作用後画像Bにおけるパターンが変形され、この変形されたパターンに基づいて、試験体SMの外力作用後画像Bから、パターンのマッチングによって伸縮率が求められる。
(もっと読む)
三次元形状測定装置、三次元形状測定方法及びコンピュータプログラム
【課題】少ない投影パターン数で、形状変化が急激な計測対象や不連続な計測対象の高精度な形状計測を可能とする。
【解決手段】三次元形状計測装置は、明るさ変化を有するパターンを計測空間に投影するパターン投影手段と、パターンが投影された計測空間を撮影する撮像手段とを備え、計測空間に存在する計測対象の三次元形状を計測する三次元形状計測装置であって、撮影手段により得られた撮影画像のパターンの明るさ変化からパターンの局所的な配置情報を算出する局所配置情報算出手段と、撮影画像におけるパターンのボケ量を算出するボケ量算出手段と、局所配置情報とボケ量とに基づき、計測対象の三次元形状を算出する三次元形状算出手段とをさらに備える。
(もっと読む)
121 - 140 / 860
[ Back to top ]