
Fターム[2F065QQ38]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 画像処理(1次元を含む) (5,599) | パターンマッチング (1,160)
Fターム[2F065QQ38]の下位に属するFターム
標準パターンとの (300)
Fターム[2F065QQ38]に分類される特許
141 - 160 / 860
姿勢制御装置、制御方法及びプログラム
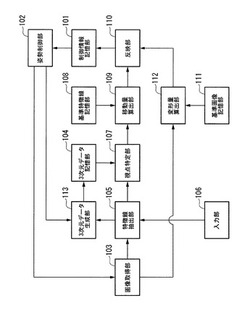
【課題】検査対象と撮像装置との相対的な位置関係である視点位置が基準視点位置と同じになるように、撮像装置の姿勢を制御する。
【解決手段】特徴線抽出部105は、撮像装置が所定の姿勢で検査対象を撮像した画像データから検査対象の特徴線を抽出する。次に、移動量算出部109は、当該特徴線の位置と基準特徴線の位置とに基づいて、現在の視点位置から基準視点位置までの移動量を算出する。そして、反映部110は、当該移動量を姿勢制御情報に反映させる。
(もっと読む)
位置検出システム、そのデータ処理装置、そのデータ処理方法およびコンピュータプログラム

【課題】対象人物へのマーカーの装着などを必要とすることなく、極近距離でなくとも対象人物の頭部などの三次元位置を特定することができる位置検出システムを提供する。
【解決手段】位置検出システム100は、取得された測距画像データDGと温度画像データTGとを関連させて定温物質の三次元位置TPを特定する。このため、対象人物HMへのマーカーの装着などを必要とすることなく、極近距離でなくとも対象人物HMの頭部HUなどの三次元位置TPを特定することができる。
(もっと読む)
画像相関変位センサ
【課題】簡便な構成でターゲット面と垂直な成分を含む方向の変位量を測定することができる画像相関変位センサを提供すること。
【解決手段】本発明の一態様にかかる画像相関変位センサは、照射光を出射する照射部130'と、ターゲット面300で生成したスペックルフィールドを複数回に亘って撮像するために用いられ、ターゲット面近傍においてターゲット面の法線方向から傾斜した光線路Aと、光線路B'と、光線路A,B'の少なくとも一方を偏向する素子110'と、を有する撮像部240と、光線路Aにおいて撮像することにより得られた複数画像と光線路B'において撮像することにより得られた複数画像とに基づいて、ターゲット面300の法線成分を含む方向の変位を計算する処理部200と、を備えている。
(もっと読む)
像内の構造の位置を決定する方法及び該方法を実施するための位置測定装置
【課題】基準点に対する像内の構造の位置を決定する方法、更に、この方法を実施するための位置測定装置を提供する。
【解決手段】対称中心を有する構造の基準点に対する像内の位置を決定する方法を提供し、本方法は、構造を含み、かつ基準点を有する像を準備する段階と、基準点に対する像の少なくとも1つの対称操作を実施し、それによって構造に対して合同である鏡像反転構造を有する少なくとも1つの鏡像が得られる段階と、構造と1つの鏡像反転構造又は2つの鏡像反転構造との間の少なくとも1つの変位ベクトルを決定する段階と、構造の位置を少なくとも1つの変位ベクトルから基準点に対する構造の対称中心の位置として計算する段階とを含む。更に、基準点に対する像内の構造の位置を決定するための位置測定装置を提供する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】複数の視差候補の中から最適な視差を精度よく選択することができる画像処理装置等を提供する。
【解決手段】画像取得部11は、同一被写体について視差のある2つの画像を取得する。特徴点候補取得部12は、画像取得部11により取得された一方の画像から特徴点候補を取得する。視差候補取得部13は、ステレオマッチングを行い、他方の画像から特徴点候補毎の視差候補をそれぞれ取得する。特徴点選択部14は、取得された特徴点候補の中から所定の条件を満たすものを特徴点として選択する。隣接点取得部15は、特徴点選択部14により選択された特徴点に隣接する隣接点を、特徴点毎にそれぞれ取得する。視差決定部16は、特徴点と、視差候補と、隣接点と、に基づいて、確率伝搬法によるアルゴリズムを用いた処理を実行し、各特徴点に対応する視差を決定する。
(もっと読む)
測位処理装置、測位処理方法、画像処理装置および画像処理方法
【課題】互いに異なる視点から撮影された複数の撮影画像に基づいて測位対象の位置を測定する場合に、カメラ内部パラメータを用いなくても、簡易にかつ高精度に測位対象の位置を測定する。
【解決手段】互いに異なる視点から撮影された複数の入力画像に基づいて、測位対象の3次元位置を測定する測位処理装置100であって、各入力画像に対応する光学系に入射する光線の進行方向を示す光線ベクトルを各入力画像内の各画素に対応付けた光線情報を保存している光線情報保存部102と、光線情報保存部102に保存されている光線情報を用いて、測位対象の3次元位置を測定する測位部110とを備える。
(もっと読む)
点群位置データ処理装置、点群位置データ処理方法、点群位置データ処理システム、および点群位置データ処理プログラム
【課題】異なる視点から得た三次元点群位置データを扱うための処理を効率化する技術を提供する。
【解決手段】測定対象物の三次元点群位置データを取得する点群位置データ取得部111、三次元点群位置データに基づいて非面領域を算出する非面領域算出部を備えた点群位置データ処理部113、第1の視点において点群位置データ取得部111が得た三次元点群位置データの内の前記非面領域に含まれる三次元点群位置データに基づき、第1の視点から見た測定対象物と第1の視点とは異なる第2の視点から見た測定対象物とにおいてオーバーラップさせる部分を算出するオーバーラップ部分算出部114を備え、2つの視点から得た三次元点群位置データ間の位置合わせに適した特徴部分を含むオーバーラップ部分を算出する。
(もっと読む)
欠陥寸法測定装置、欠陥寸法測定方法、及びプログラム
【課題】撮像装置の光軸方向に対して高低差がある検査対象の欠陥の寸法を正確に測定する。
【解決手段】平面座標取得部302は、画像データに含まれる検査対象の欠陥を示す画素の平面座標を取得する。空間座標変換部305は、平面座標取得部302が取得した平面座標を、仮想空間に配置された検査対象の外観を表す3次元モデルの表面と平面座標が示す点に対応する仮想空間上の直線との交点を示す空間座標に変換する。仮想寸法算出部307は、空間座標変換部305が変換した複数の空間座標を用いて仮想空間における前記欠陥の寸法を算出する。
(もっと読む)
校正装置、距離計測システム、校正方法および校正プログラム
【課題】 ステレオカメラの経時的な位置ずれを補正し校正できる装置や方法を提供する。
【解決手段】 この校正装置は、移動体に搭載され、カメラ位置に関するパラメータを校正する装置であり、2地点において一方のカメラで撮影した2つの基準画像と、他方のカメラで撮影した2つの対応画像と2つの基準画像とを用い、各地点につき基準画像と対応画像の中の共通する複数の特徴点の位置から算出された複数の視差データとの入力を受け付ける画像取得部300と、2つの基準画像の中の共通する複数の特徴点を探索する特徴点探索部310と、探索された各特徴点につき、2つの基準画像の各特徴点における視差データから、視差とその視差に対応する視差変化量とをそれぞれ算出する視差計算部320と、算出された複数の視差および視差変化量から、カメラ位置に関するパラメータの補正値を算出する補正値計算部330とを含む。
(もっと読む)
ダム堤体の変位測定装置および変位測定方法
【課題】ダムの堤体に配置したワイヤの水平方向および鉛直方向の変位を検出でき、ダム堤体の変位を精度良く検出できるダム堤体の変位測定装置を提供すること。
【解決手段】ダム堤体の変位測定装置1は、堤体内部に鉛直に配置された測定ワイヤ2と、測定ワイヤ2に固定された金属球20と、金属球20を撮影する2台のカメラ21,22および照明装置23,24と、各カメラ21,22で撮影された画像を処理する画像処理装置30とを備える。カメラ21,22は、レンズの光軸が水平面内で互いに直交する位置に配置する。画像処理装置30は、撮影画像データから金属球20を認識して重心位置を検出し、その重心位置の変位によって、ダム堤体の変位を測定する。金属球20を2台のカメラ21,22で撮影して重心位置を検出しているので、金属球20の三次元方向の変位量を測定でき、ダム堤体の変位を精度良く検出できる。
(もっと読む)
材料試験機
【課題】 標線位置計算範囲の設定を自動で行うことが可能な材料試験機を提供する。
【解決手段】 試験実行前の試験片に貼着した標線シールの画像データから標線の色濃度プロファイルを作成するテンプレート作成部61と、標線の色濃度プロファイルを記憶する記憶部64と、試験片の色濃度プロファイルを作成するための領域を設定する色濃度計算領域設定部62と、標線シールを貼着した試験片の画像データから試験片の色濃度プロファイルを作成するプロファイル作成部71と、記憶部64に記憶したテンプレートと試験片の色濃度プロファイルとの正規化相関係数によるテンプレートマッチングを行う相関係数演算部72と、得られた相関係数から標線位置を決定する標線位置決定部73と、その標線位置に基づいて標線位置計算範囲を設定する標線位置計算範囲設定部74を備える。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び電子装置
【課題】情報処理装置とユーザとの距離に拘らず、違和感なく情報処理装置を操作できるようにする。
【解決手段】肌領域検出部61は、画像上からユーザの肌を表す肌領域を検出し、特徴点抽出部62は、肌領域の特徴点を抽出し、距離算出部63は、肌領域に基づいて、ユーザまでの距離を算出し、座標変換部46は、距離に応じて、特徴点を所定の座標空間上の座標点に変換するための変換係数を決定し、決定した変換係数に基づいて、特徴点を所定の座標空間上の座標点に変換する。本発明は、例えば、撮像された画像から、ユーザの肌領域を検出する検出装置に適用できる。
(もっと読む)
位置検出装置及び位置検出方法
【課題】ロバストに物体の位置を検出する位置検出装置及び位置検出方法を提供する。
【解決手段】第1位置情報推定部は情報源を表す第1の態様の情報に基づいて第1の位置情報を推定し、第2位置情報推定部は前記情報源を表す第2の態様の情報に基づいて第2の位置情報を推定し、情報統合部は前記第1の位置情報及び前記第2の位置情報の各々と複数の粒子からなる粒子群を対応付け、対応付けられた粒子群に属する粒子毎の位置情報に基づいて前記情報源の位置情報を算出する。
(もっと読む)
3次元形状取得装置および3次元形状取得プログラム
【課題】複数の画像から高い精度で奥行き情報を生成する3次元形状取得装置および3次元形状取得プログラムを提供する。
【解決手段】3次元形状取得装置は、基準画像および参照画像からブロック画像を、それぞれ基準ブロック画像および参照ブロック画像として切り出すブロック画像切出手段と、基準ブロック画像における所定の色を基準色として特定し、基準ブロック画像および参照ブロック画像において、基準色に所定の範囲内で類似する色の画素を対象領域として抽出する対象領域抽出手段と、基準ブロック画像における所定の色を対象領域の背景をマスクする置換色として特定し、基準ブロック画像および参照ブロック画像において、対象領域に含まれない画素の色を置換色で置き換える色置換手段と、位相限定相関法により視差を計測する視差計測手段と、視差計測手段が計測した視差から3次元座標位置を生成する3次元座標位置生成手段とを備えることを特徴とする。
(もっと読む)
測定設定データ作成装置、測定設定データ作成方法、測定設定データ作成装置用のプログラム及び寸法測定装置
【課題】 ワークの寸法を測定するための測定設定データを容易に作成することができる測定設定データ作成装置を提供する。
【解決手段】 形状線の位置情報、寸法線の位置情報、寸法線に関連付けられた設計値及び公差からなる設計値情報、並びに、寸法種別情報を含む設計データを取得する設計データ取得部21と、形状線の位置情報、寸法線の位置情報及び寸法種別情報に基づいて、寸法線を形状線によって規定される位置に対応づけることにより、形状線における測定対象箇所及び測定種別を特定する測定対象箇所特定部23と、形状線の位置情報に基づいて、ワーク画像からワークを検出するための特徴量情報を生成する特徴量情報生成部24と、特徴量情報、測定対象箇所情報、並びに、測定対象箇所に関連付けた設計値情報からなる測定設定データを生成する測定設定データ生成部25により構成される。
(もっと読む)
画像検査方法および画像検査装置
【課題】所定の繰り返しピッチで連続して生産される部品の画像検査において,その画像検査の実施状態を知ることが可能となる技術を提供する。
【解決手段】画像検査装置10において,マッチング処理部141は,入力された検査画像のフレームから部品を検出し,検出された部品の位置と相関値とを取得する。フレーム間部品対応検出部151は,連続する2つのフレーム間で類似する部品の対応を検出する。対応部品位置差分算出部152は,対応部品間の検出位置の差分である対応部品位置差分を算出する。対応部品位置差分統計部153は,対応部品位置差分を統計した移動量ヒストグラムを作成する。部品移動量推定部155は,移動量ヒストグラムから連続するフレーム間での部品の移動量を推定する。画像検査実施状態判定部150は,部品の移動量の推定結果から,画像検査が適切に実施されているか否かを判定する。
(もっと読む)
透明板状部材の歪み検出装置
【課題】透明な板状部材でも、モアレパターンが得られる歪み検出装置の提供。
【解決手段】板状の透明な検査対象物16,17を搭載し得る透明な定盤2を有し、定盤の上下に第1及び第2の基準格子ユニット3,5が対称的に配置されており、各基準格子ユニット3,5は、面発光ユニット3a,5a及び該面発光ユニットの発光面3c,5cに配置された面格子3b,5bをそれぞれ有し、第1の基準格子ユニット3と対向する位置に、第1の基準格子ユニット3の面格子3bの検査対象物16,17からの反射像と、第2の基準格子ユニット5の面格子5bの、定盤2及び検査対象物16,17を透過して来た像を重ね合わせた重畳画像データDATを取得する面格子画像取得手段7を設け、該重畳画像データDATに基づいて、モアレ縞が発生しているか否かを判定して検査対象物16,17の歪みや反りの存在を判定する。
(もっと読む)
画像測定装置、画像測定方法及び画像測定装置用のプログラム
【課題】 ワークのエッジ位置に沿って誤差を識別することができるとともに、ワーク画像との対応関係を容易に把握することができる画像測定装置を提供する。
【解決手段】 ワーク画像からエッジを抽出するエッジ抽出手段と、ワークの輪郭情報及び輪郭位置の公差を含む測定設定データを保持する測定設定データ記憶手段と、ワーク画像及び輪郭情報を位置合わせし、ワーク画像上のエッジ位置とこのエッジ位置に対応する輪郭位置との変位量を示す誤差を算出する誤差算出手段と、算出された誤差を公差と比較し、良否判定を行う誤差判定手段と、抽出されたエッジ及び良否判定の結果をワーク画像上に表示する測定結果表示手段により構成される。測定結果表示手段は、誤差が不良と判定されたエッジ位置について、誤差の大きさが極大となるエッジ位置の誤差を数値表示する。
(もっと読む)
マーク読み取り装置、および方法
【課題】特に、布片に付されたマークを十分な精度で認識できるマーク読み取り装置、および方法を提供する。
【解決手段】布片Tを撮影するカメラ11と、撮影した布片画像を処理する画像処理装置とを備える。布片画像の明度勾配方向θを演算し、あらかじめ記憶された複数種類のテンプレート画像のうち、布片画像の明度勾配方向θに一番近似する明度勾配方向を有するテンプレート画像に対応する種類を、布片Tの種類と判断する。織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にある布片画像でも、そのノイズに惑わされることなく、精度の良い判断ができる。布マークを十分な精度で認識し、布片の種類や表裏を識別することで、その結果を基に布片のハンドリング方法を決定することができる。
(もっと読む)
パターン検査装置、パターン検査方法、およびパターンを有する構造体
【課題】検査感度を向上させることができるパターン検査装置を提供する。
【解決手段】第1の検出データと前記第1の遅延データとから解像限界以下のパターンのデータを抽出する第1の抽出部33と、前記抽出された第1の検出データに係るデータの注目画素に対する周辺領域の出力レベルの平均値を演算し、前記抽出された第1の検出データに係るデータの出力レベルと前記平均値との差を演算する第1の出力変位演算部34aと、前記抽出された第1の遅延データに係るデータの注目画素に対する周辺領域の出力レベルの平均値を演算し、前記抽出された第1の遅延データに係るデータの出力レベルと前記平均値との差を演算する第2の出力変位演算部34bと、前記第1及び第2の出力変位演算部による演算結果に基づいて、パターン欠陥を検出する。
(もっと読む)
141 - 160 / 860
[ Back to top ]