
Fターム[2F065QQ38]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 画像処理(1次元を含む) (5,599) | パターンマッチング (1,160)
Fターム[2F065QQ38]の下位に属するFターム
標準パターンとの (300)
Fターム[2F065QQ38]に分類される特許
101 - 120 / 860
画像処理方法、画像処理装置およびそれを搭載した水中検査装置
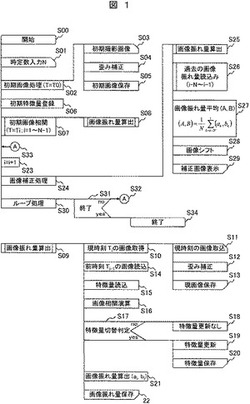
【課題】画像情報のみを用いて、画像の振れを修正し、画像を安定化でき、水中検査装置の操作性が向上する画像処理方法,画像処理装置およびそれを搭載した水中検査装置を提供する。
【解決手段】移動体に搭載した撮影手段により被写体を連続的に撮影して撮影画像を取得し、連続して得られた2つの画像に共通に撮影されている被写体の要素を特徴量に定め、連続して得られた2つの画像に対して画像相関処理を行って特徴量の一致度を判断し、所定以上の一致度が得られない場合には新たな被写体の要素を特徴量に定め、連続して得られた撮影画像における特徴量の位置を、二次元の撮影画像の一方方向の所定位置に固定し、二次元の撮影画像の他方向の変化量を前記撮影手段の移動量とする。
(もっと読む)
測定装置、測定方法、およびプログラム

【課題】対象物に接触または近接させた複数の測定用端子の位置を撮影画像に基づいて取得する技術において、一部の測定用端子の位置を取得できなかった場合に、再度の撮影を行うことなくその位置を取得する。
【解決手段】プローブソケット11,12は、被験者の頭部25に複数が装着される。プローブソケットを被験者に装着した状態を複数の方向から撮影し、その撮影画像からプローブソケットの位置を検出する。この際、ある特定の撮影画像からの検出が上手くゆかず、一部のプローブソケット位置が特定できない場合、他の撮影画像の中に写っている当該プローブソケットの撮影画像を利用して再検出を行う。これにより、検出ミスがあっても再度の撮影を行わずに済む。
(もっと読む)
3次元寸法測定装置
【課題】本発明の目的は、画像を用いた測定において、1枚の画像に納まりきらない程の高い倍率で画像を取得する際にも、容易な操作で画像を取得でき、かつ、寸法を算出する際に、1枚の画像に納まりきらない程の高い倍率で撮影した画像を用いることで、1枚の画像に納まりきる画像から寸法を算出するよりも高い精度で寸法を算出可能な装置を提供することにある。
【解決手段】本発明は、ワイドカメラの画像からワークの輪郭を抽出し、抽出された輪郭情報に基づき、駆動機構の走査軌跡および、複数のカメラの撮像倍率を決定し、決定された走査軌跡を走査中に、複数のカメラから複数枚の画像を取得し、複数枚の画像を合成して、高倍率の画像を生成し、生成された高倍率画像から高精度に輪郭の寸法を求めることを特徴とする。
(もっと読む)
画像処理方法、プログラム、および画像処理装置
【課題】計測時の手間を低減する。
【解決手段】CPU34cは、ブレードを撮像した動画像を構成する第1のブレード画像からテンプレート画像を抽出する。CPU34cは、第1のブレード画像とテンプレート画像とを比較し、第1のブレード画像の中から、テンプレート画像におけるブレードの姿勢と一致する姿勢のブレードを含む第2のブレード画像を抽出する。CPU34cは、予め算出された3次元形状を有する物体の画像をテンプレート画像に重畳した第1の画像を表示部に表示し、テンプレート画像におけるブレードの姿勢に一致するように、第1の画像における物体の姿勢を制御する。CPU34cは、この物体の画像を第2のブレード画像に重畳した第2の画像を表示部に表示する。CPU34cは、第2の画像における物体上の計測点の3次元座標を算出し、算出した3次元座標に基づいて、物体のサイズを算出する。
(もっと読む)
位置検出システム、表示システム及び情報処理システム
【課題】 撮像装置のレンズ及び撮像素子を対象面と平行な方向に沿う方向に配置するこ
とで、撮像画像における歪みを抑止し、位置検出の精度を向上させる位置検出システム、
表示システム及び情報処理システムを提供すること。
【解決手段】 位置検出システム400は、撮像画像を撮像する撮像部500と、撮像部
500からの撮像画像に基づいて、対象面20に設定された検出エリアでの対象物OBの
座標情報を求める座標演算部430と、を含み、撮像部500は、レンズ部LEを有する
光学系と、撮像素子IMとを含み、撮像部500から対象面20の中央部へと向かう方向
である第1の方向と、対象面20のなす角度α1とし、レンズ部LEの光軸方向である第
2の方向と対象面20のなす角度をα2とした場合に、角度α1及び角度α2は、α1<
α2を満たす。
(もっと読む)
情報処理方法及び情報処理装置
【課題】 複数の撮像装置をそれぞれ処理装置に接続した状態で、第1の撮像装置の位置姿勢情報計測値を第2の撮像装置の位置姿勢に変換するための較正情報をより簡便に取得することを目的とする。
【解決手段】 マスタ演算処理装置300は、ビデオカメラ120が撮影したランドマークを含む撮影画像を入力し、ビデオカメラ120の位置姿勢を算出し、スレーブ演算処理装置1300に送信する。スレーブ演算処理装置1300は、ビデオカメラ1120で撮像された画像上のランドマークの識別番号及び画像座標を取得し、(画像座標−世界座標−マスタ撮像装置位置姿勢)の組としてデータリストを生成する。生成したデータリストより較正情報算出部1340は、画像座標の理論値と実際の観測値との誤差が最小となるようにビデオカメラ120からビデオカメラ1120への位置姿勢の較正情報を算出する。
(もっと読む)
ワーク位置の認識方法及び認識装置
【課題】 1台のカメラでワークの位置などを認識するにあたり、ワークの形状等に特徴部分がない場合でも、その位置などを認識することができ、また、複数のワークがカメラの視野に入る場合でも、対象とすべきワークを的確に認識できるようにする。
【解決手段】 予め所定の方向から視たワークモデルの基本形状を記憶しておき、この基本形状とカメラで画像情報として取得したワーク形状との相関性を算出するとともに、基本形状が得られる方向にカメラを移動させ、移動後に新たに取得した画像情報のワーク形状と基本形状の相関性を求め、この両者の相関性が所定の閾値に達するまでカメラの移動と画像取得を繰り返す。画像情報に複数のワークが認識される場合、移動後の相関性が移動前の相関性より低い場合、次に相関性が高いワークに切り換える。
(もっと読む)
計測装置
【課題】簡単な構成で、試料を加熱しつつ正確に計測することが可能な計測装置を提供する。
【解決手段】計測装置は、試料Aを保持する位置または試料Aに対向する位置に配置され、透明基板121と透明基板121の表面に設けられた透明導電膜122を有する透明部材12と、試料Aを撮影する光検出部22と、透明部材12の透明導電膜122に印加する電圧を制御することにより、透明部材12の温度を制御する熱制御部42とを備える。
(もっと読む)
ひずみ測定装置およびひずみ測定方法
【課題】本発明は、分解能を維持しつつ測定範囲をより広げ得るひずみ測定装置およびひずみ測定方法を提供する。
【解決手段】本発明では、複数のマークMを備える試験体SMに外力を作用させる前後における試験体SMの画像が、外力作用前画像および外力作用後画像として第1カメラ装置11によって得られ、追跡マークMcとされる、前記複数のマークMのうちの1つのマークMの位置および所定の基準位置の間の基準距離と、前記外力作用前画像における追跡マークMcの位置と、前記外力作用後画像における追跡マークMcの位置とに基づいて、試験体SMの伸縮率が求められる。ここで、追跡マークMcが外力作用後画像での所定の端部領域内に位置する場合には、複数のマークMのうちの前記追跡マークMcと異なって前記端部領域外に位置するマークMを新たな追跡マークMcとするものである。
(もっと読む)
画像処理装置および画像処理方法
【課題】高密度の視差情報の導出を安価な低処理能力の計算機で実現する。
【解決手段】画像処理装置120は、現在より過去における1または複数回分の視差を示す視差情報を保持するデータ保持部152と、光軸を異にして撮像された2つの画像データを取得する画像取得部150と、2つの画像データのうち予め定められたいずれか一方の画像データの任意の画像位置における基準部分画像に対応する、他方の画像データの対応部分画像の探索範囲を、任意の画像位置に関連付けて保持された過去における視差情報に示された視差に基づいて決定する探索範囲決定部160と、決定された他方の画像データの探索範囲から対応部分画像を探索する部分画像探索部162と、任意の画像位置と探索された対応部分画像の画像位置とから視差を導出し、視差を示す視差情報を、任意の画像位置に関連付けてデータ保持部に保持させる視差導出部164とを備える。
(もっと読む)
ステレオカメラの校正装置および校正方法
【課題】ステレオカメラの校正装置および校正方法を提供すること。
【解決手段】ステレオカメラの校正装置300は、第1カメラ320と、第2カメラ318と、カメラステー140とを含んでおり、コリメータユニット302がステレオカメラから距離を隔てて配置されたテストチャート306が無限遠位置に配置されたと等価な光路を形成させている。視差算出部362は、ステレオカメラが撮影した左右画像からテストチャート306とステレオカメラとの間の異なる光学的距離に相当する視差データを計算し、パラメータ算出部364が、視差算出部362が計算した視差データおよびテストチャートまでの実距離データを使用してステレオカメラの測距パラメータである視差オフセットbおよび距離換算パラメータaを算出している。
(もっと読む)
ラベル検査方法及び装置
【課題】容器に貼付されたラベルの良否がラベラ内で検査できるラベル検査装置を提供する。
【解決手段】自転しながら公転軌道3aを公転する容器2にラベル7を貼付するラベラ1と、ラベラ1の公転軌道3aを挟んで対向し、かつラベルの正面方向またはラベルの側面方向に設置された少なくとも一対の撮像手段12a〜12dと、撮像手段12a〜12dが撮像した容器2の画像をから容器2に貼付されたラベル7の特徴点を計測する画像計測演算手段と、ラベル7の良否を判定する基準値が設定された良否判定基準値設定手段と、画像計測演算手段が計測した特徴点と基準値とを比較演算してラベル7の良否を判定する良否判定演算手段とから構成したもので、ラベラ1内に撮像手段12a〜12dを設置するだけでよいため、既存のラベラにも容易かつ安価に実施することができる。
(もっと読む)
ひずみ計測方法及びひずみ計測システム
【課題】測定対象物の表面に発生するひずみを、直接測定すること無く離れた位置から簡易に、かつ、高精度に計測可能なひずみ計測方法及びひずみ計測システムを提供する。
【解決手段】ひずみ計測システム1は、測定対象物2の表面の計測対象領域Sを正面から撮像する第1撮像装置3と、測定対象物2の側面を撮像する第2撮像装置5と、第1撮像装置3及び第2撮像装置5により撮像された画像に基づいて測定対象物2に発生するひずみを算出する計測装置10と、を備えている。
(もっと読む)
欠陥検査方法及びその装置
【課題】
複数の方向に配置した複数の検出器からの信号を基板の高さ変動の影響を受けることなく処理して基板上のより微細な欠陥を検出することを可能にする。
【解決手段】
第1の集光検出手段と第2の集光検出手段とにそれぞれ複数列の光センサアレイを有する光電変換器を備え、処理手段は第1及び第2の集光検出手段のそれぞれの複数列の光センサアレイからの検出信号を用いて試料の表面に対する第1及び第2の集光検出手段の焦点位置のずれを求め、この求めた第1及び第2の集光検出手段のそれぞれの焦点位置のずれに応じて第1の集光検出手段から出力された検出信号と第2の集光検出手段から出力された検出信号とを補正し、この補正した第1の集光検出手段から出力された検出信号と第2の集光検出手段から出力された検出信号とを統合して試料上の欠陥を検出するようにした。
(もっと読む)
乗員検知装置
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
3次元情報取得方法、3次元情報取得装置、および3次元情報取得プログラム
【課題】被写体を2次元で表現する画像に基づき被写体の3次元空間内における奥行きを示す3次元情報の検出精度を高めること。
【解決手段】3次元の対象物を2次元で表わす画像の画像データを入力する画像入力ステップと、前記画像データに基づき前記画像の特徴量を示す特徴量情報を、前記画像を複数個に分割した分割エリア毎に取得する特徴量取得ステップと、3次元の対象物を2次元で表わす画像内における任意のサンプリングポイント毎に、当該サンプリングポイントの画像の特徴量を示すサンプリングポイント特徴量情報と、仮想3次元空間において前記対象物を表現した場合の前記サンプリングポイント同士の水平方向の間隔を示す3次元情報とをそれぞれ対応付ける3次元情報テーブルを参照して、前記特徴量情報が示す前記分割エリアの画像の特徴量と対応する前記3次元情報を取得する3次元情報取得ステップと、を含むことを特徴とする。
(もっと読む)
対象物検出装置及び方法
【課題】広い監視領域における大きさが異なる複数の対象物の位置や速度を推定できるようにすること。
【解決手段】本実施形態に係る対象物検出装置は、複数台のカメラにより道路上に存在する対象物を撮影した基準画像上で分割した短冊状領域の各点に関して、他のカメラで撮影された参照画像上で対応する点を算出する対応点算出部4と、各短冊状領域内の各点と、求められた参照画像の対応点との間の画像特徴量の一致度を算出する画像一致度算出部5と、短冊状領域の高さと対象物の接地位置とを変数として画像特徴量の一致度を最大にする接地位置関数を生成する接地位置算出部6と、接地位置関数における短冊状領域の高さに基づいて対象物の高さを算出する対象物高さ算出部7とを備える。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
形状測定装置
【課題】高い精度で、微細加工処理が施された基板上のパタン形状ならび欠陥を測定することが可能な形状測定装置を提供する。
【解決手段】本発明は、反射型サンプル基板2上の被検パタン領域に対し、空間領域及び/又は時間領域でのコヒーレントな光を、照射位置をシフトさせながら複数回照射する照射部10と、照射部10により照射された被検パタン領域からの回折光を受光する撮像素子15と、撮像素子15による受光結果である画像情報を記録する記録部16aと、記録部16aに記録された画像情報から、反復計算により演算に最適な照明形状を導出し、記録部16aに記録された画像情報のうち、導出された照明形状を用いて、実波長でのパタン形状ならび欠陥を抽出する測定処理部16とを備える。
(もっと読む)
3次元形状認識装置及び方法
【課題】画像処理の処理効率の向上と共に相対的位置角度スケールを確実に検出できる3次元形状認識装置を実現することが求められる。
【解決手段】本実施形態によれば、3次元形状認識装置は、入力部と、幾何学的要素抽出部と、幾何学的要素対応付け処理部と、位置角度推定処理部とを備えた構成である。入力部は、同一の3次元形状の認識対象に対する複数の形状データを入力する。幾何学的要素抽出部は、前記各形状データのそれぞれから幾何学的要素を抽出する。幾何学的要素対応付け処理部は、角度または距離の比を含む相似不変量をキーとするハッシュテーブルを使用し、前記各幾何学的要素間で位置関係が合致する組み合わせを選出する。位置角度推定処理部は、前記選出される複数の組み合わせに基づいて前記各形状データ間で前記認識対象の相対的位置角度スケールを示す相対的位置角度情報を算出する。
(もっと読む)
101 - 120 / 860
[ Back to top ]