
Fターム[2F065QQ38]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 画像処理(1次元を含む) (5,599) | パターンマッチング (1,160)
Fターム[2F065QQ38]の下位に属するFターム
標準パターンとの (300)
Fターム[2F065QQ38]に分類される特許
21 - 40 / 860
三次元計測装置、三次元計測装置の制御方法、情報処理装置、情報処理装置の制御方法、およびプログラム
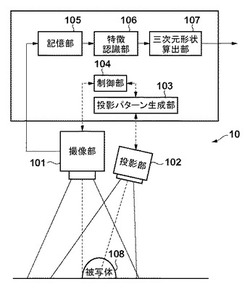
【課題】特徴の認識性能を向上する。
【解決手段】計測用パターンと特徴パターンとを有するパターンを被写体へ投影する投影部と、パターンが投影された被写体を撮像する撮像部と、パターンにおける計測用パターンと、投影部と撮像部との位置関係に基づいて決定される複数のエピポーラ線とによって、撮像部により撮像された画像を複数の領域に分割して、分割された複数の領域のうち所定の領域をグループ化するグループ化部と、所定の領域のそれぞれにおける特徴パターンの差異に基づいて当該特徴パターンを認識する特徴認識部と、特徴認識部により認識された特徴パターンに基づいて被写体の三次元形状を算出する三次元形状算出部と、を備える。
(もっと読む)
カラーフィルタ基板の欠陥検査方法

【課題】従来の標高計算は局所領域のミスマッチングによる誤差が生じ、精度の高い標高情報が得られず、多大な処理時間がかかるという問題点がある。
【解決手段】カラーフィルタ基板上の局所領域の標高をステレオ方式で算出し欠陥判定をする欠陥検査方法において、ステレオ画像の一方の撮像画像である基本画像から局所領域を検出する工程、ステレオ画像の他方の撮像画像であって局所領域を含む参照画像を取得する工程、局所領域を含むマッチング領域をステレオ画像から選定する工程、マッチング領域から基準マークとなる部位を選定する工程、局所領域を鮮明化する工程、鮮明化された局所領域の中心座標を求め、基準マークからの距離を算出する工程、基本画像と参照画像における局所領域間の視差を求める工程、局所領域の標高を算出する工程、とを含むことを特徴とするカラーフィルタ基板の欠陥検査方法。
(もっと読む)
検査装置及び方法
【課題】スポット溶接部の有無及び位置を精度良く計測することができる検査装置及び検査方法を提供する。
【解決手段】取得画像上のスポット溶接部を抽出する溶接部抽出部と、抽出したスポット溶接部の座標を算出する座標算出部9と、光線によって計測対象物上に指し示された3点以上の基準点を取得画像から抽出する基準点抽出部20と、抽出した取得画像上の基準点の座標を基に正対対象物に対する計測対象物の傾斜及び倍率のずれに起因する誤差を補正する補正値を算出する第1の補正値算出部21と、取得画像上の計測対象物の特徴量を抽出する特徴量抽出部22と、抽出した特徴量から計測対象物の蛇行及び撮像軸周りの回転に起因する誤差を補正する補正値を算出する第2の補正値算出部23と、補正値算出部21,23で算出した補正値によりスポット溶接部の座標を補正する座標補正部24とを備えている。
(もっと読む)
変位計測装置、変位計測方法及びプログラム
【課題】赤熱状態にある測定対象物においても複数の評価点の変位を同時に計測できる変位計測手法を提供すること
【解決手段】画像成分決定手段3bにより、赤熱前後の測定対象物1をデジタルカメラ2で撮影した画像データをそれぞれRGB成分に分離して、赤熱前後で赤熱領域の輝度値の変化が最も小さい成分を決定し、画像変換手段3cにより、変形前後の測定対象物1をデジタルカメラ2で撮影した画像データを、画像成分決定手段3bにより決定された成分の画像データに変換し、この変換された変形前後の測定対象物の画像データを使用して、変位演算手段3により、パターンマッチング処理を行い、変位を演算する。
(もっと読む)
視線分析装置、視線計測システム、方法、プログラム、記録媒体
【課題】本発明の課題は、被験者の視線を推定・追跡することで、評価対象印刷物の掲載情報または陳列棚の商品の注目度を分析評価するシステムを提供することである。
【解決手段】
メガネを通して見るシーン画像とシーン画像上の注視点座標を視線分析装置に送信する視線追跡メガネと、基準画像および基準画像の分割画像の、特徴点の座標と特徴量を記憶する手段と、視線追跡メガネからシーン画像と注視点座標を受信する手段と、シーン画像の特徴点の特徴量と分割画像の特徴点の特徴量とに基づき最も類似度評価の高い特徴点を組み合せる手段と、最も多い組合せ個数を持つ分割画像の特徴点の座標とシーン画像の特徴点の座標に基づいて座標変換行列を算出する手段と、座標変換行列とシーン画像上の注視点座標から算出した分割画像上の注視点座標を、基準画像に変換して注視点マークを合成する手段と、を備える視線分析装置と、特徴とする視線計測システムである。
(もっと読む)
3次元計測システム及び3次元計測方法
【課題】外部標定の容易なステレオ撮影による3次元計測システム及び3次元計測方法を提供する。
【解決手段】3次元計測システムは、測定対象物1を複数方向から撮影してステレオ画像20を得るステレオ撮影部11と;測定対象物の全体をカバーする基準体2の一部を構成する、複数の基準マーク4を有するサブ基準体3と;ステレオ撮影部で撮影して得たステレオ画像に基づくサブ基準体が有する複数の基準マークの3次元座標値の撮影測定値fと予め基準計測された基準測定値gとを含む、基準体の3次元数値解析モデルである基準体モデル102を3次元計算空間V中に一体として画成する基準体情報画成部12と;基準体モデルを用いてステレオ撮影部の外部標定要素を算出する標定要素算出部13と;外部標定要素により定位されたステレオ撮影部により撮影される測定対象物のステレオ画像から測定対象物の3次元計測をおこなう3次元計測部14とを備える。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、精度が高い距離情報を生成できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、基準画像における隣接画素間の色情報の差分絶対値が色情報閾値Tc以下であるか否かによって、隣接画素間でメッセージを伝搬できるか否かを判定するメッセージ伝搬制限判定部12と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部13と、メッセージの評価関数を計算する評価関数計算部14と、評価関数が最小となる距離を、距離情報として推定する距離推定部15とを備える。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
三次元位置・姿勢認識装置、産業用ロボット、三次元位置・姿勢認識方法、プログラム、記録媒体
【課題】ステレオマッチング処理において互いに異なる部品91a〜91c間で対応付けが行われるといった誤対応の発生を抑制する。
【解決手段】認識対象部品91aを含む複数の部品91a〜91cを異なる視点から撮像した複数の撮像画像I1、I2それぞれから、認識対象部品91aが写る対象領域R1、R2が抽出される。複数の撮像画像I1、I2それぞれの対象領域R1、R2に対して、ステレオマッチング処理が実行される。つまり、ステレオマッチング処理を行う領域R1、R2を、撮像画像I1、I2のうちの認識対象部品91aを含む対象領域R1に限定する。そのため、対象領域R1から認識対象部品91a以外の部品91b、91cを外してステレオマッチング処理を実行することができ、その結果、ステレオマッチング処理において互いに異なる物体間で対応付けが行われるといった誤対応の発生を抑制できる。
(もっと読む)
金属板の外観評価方法
【課題】研磨部及び再研磨部の仕上がり具合を簡単な手法で定量的に評価できる金属板の外観評価方法を提供する。
【解決手段】この金属板の外観評価方法では、金属板1の表面のデジタル画像10をスキャナ4によって取得し、デジタル画像10の一部画像11に含まれる各ピクセルのRGB値をグレースケール変換して得られるAc値の波形パターンに基づいて研磨部2及び再研磨部3の外観の可否を判断する。波形パターンを用いることで、研磨部2及び再研磨部3の外観を容易かつ定量的に判断できる。また、この方法では、波形パターンに基づいて、研磨部2及び再研磨部3の研磨方向がスキャナ4の走査方向と一致しているデジタル画像10を判断対象として選別する。この前処理により、外観判断工程で用いる波形パターンのS/N比が向上し、判断精度が高められる。
(もっと読む)
マシンビジョン検査システムおよびその位置測定結果の決定方法
【課題】複数の視野に分割された対象を高精度に測定することができるマシンビジョン検査システムおよびその位置測定結果の決定方法を提供する。
【解決手段】マシンビジョン検査システムは、第1動作状態においてスケールベースの測定により第1対象FE1の位置を測定する。第2動作状態では、第1対象から第2対象に至る途中で重複画像CIA〜CICを撮影し、画像相関を利用して重複画像CIA〜CICの相互の画像変位を測定し、第1対象の位置と画像変位のセットとを合わせて第2対象FE2の位置を測定する。
(もっと読む)
三次元位置・姿勢認識装置、産業用ロボット、三次元位置・姿勢認識方法、プログラム、記録媒体
【課題】部品91の三次元認識を正確に実行する。
【解決手段】互いに異なる場所から部品91を撮像した2枚の撮像画像I1、I2に対してステレオマッチング処理が実行されて、2枚の撮像画像I1、I2間の視差pを示す視差画像Isが取得される。また、撮像画像I1からエッジEが抽出されて、部品91のエッジEを示すエッジ画像Ieが取得される。そして、エッジ画像Ieが示す部品91のエッジE上の位置での視差pが、視差画像Isに含まれる視差pから抽出されるとともに、こうして抽出された視差pに基づいて、三次元における部品91の位置および姿勢が認識される。これにより、部品91のエッジE部分の視差pに基づいて、三次元における部品91の位置および姿勢を認識することが可能となり、その結果、この三次元認識を正確に実行することが可能となる。
(もっと読む)
エゴモーション概算システムおよび方法
【課題】エゴモーション概算システムおよび方法の提供。
【解決手段】エゴモーション概算システムを利用してエゴモーションパラメータを決定するためのコンピュータ実施方法であって、第1の画像フレームおよび第2の画像フレームを取得することと、第1の画像フレームの第1の部分を選択して第1のサブ画像を取得し、かつ第2の画像フレームの第2の部分を選択して第2のサブ画像を取得することと、第1のサブ画像および第2のサブ画像に変換を実行して、それぞれ、第1の透視画像および第2の透視画像を取得することと、第2の透視画像を反復的に調整して複数の調整した透視画像を取得することと、第1の透視画像と複数の調整した透視画像との個々の差異それぞれに対応する複数の差分値を決定することと、複数の差分値のうちの1つに対応する、エゴモーションパラメータに関する並進ベクトルを決定することと、を含む、方法。
(もっと読む)
検査装置、検査方法及び検査プログラム
【課題】検査対象毎に検査パラメータを設定する必要がなく、半田付けの実装の良否を適切に判定すること。
【解決手段】複数の半田接合部を含む画像から、半田接合部を含む部分画像を複数抽出する抽出部と、抽出部により抽出された複数の部分画像を用いて、半田接合部の実装の良否を判定する基準となる基準画像を作成する作成部と、作成部により作成された基準画像と各部分画像とを比較する比較部と、比較部による比較結果に基づき、各半田接合部の実装の良否を判定する判定部と、を備える。
(もっと読む)
柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置
【課題】本願発明の課題は、柱状物体の空間情報を得るためには多くの労力と時間を要する、大量の柱状物体を漏れなく抽出することが難しい、あらかじめ柱状物体を認識しなければならない、といった問題を解決することであり、大量の計測データの中から、正確かつ短時間で、柱状物体を自動抽出する柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を提供することにある。
【解決手段】本願発明の柱状物体抽出方法は、計測点群から柱状物体を抽出する方法であり、計測点群からそれぞれ独立した領域ごとにセグメントデータを得るセグメンテーション工程と、細線化処理を行うことで立設物形状データを得る細線化工程と、主成分分析を行って固有値から算出される特徴量に基づいて形状分類を与える形状分類工程と、特徴量等に基づいて立設物の柱状判定を行う柱状物体判定工程を備える方法である。
(もっと読む)
現在位置算出装置および現在位置算出方法
【課題】本発明は、誤差の累積を抑制し、目標物になりそうなものがない単調な道路でも適切に真の現在位置を算出できる現在位置算出装置および現在位置算出方法の提供を目的とする。
【解決手段】本発明にかかる現在位置算出装置は、自車17の現在位置における2次元画像である観測画像が入力される観測画像入力部1と、所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部9と、観測画像と、記憶されている現在位置である仮現在位置に対応する参照画像とを、画像マッチングにより照合する照合部としてのピクセルパターン照合部5と、ピクセルパターン照合部5における照合結果に基づいて、自車17の真の現在位置を算出する現在位置算出部6とを備える。
(もっと読む)
空中写真画像データの対応点設定方法及び対応点設定装置並びに対応点設定プログラム
【課題】空中写真画像データ同士の対応点を精度良く自動で設定することを可能にする空中写真画像データの対応点設定方法及び対応点設定装置並びに対応点設定プログラムを提供する。
【解決手段】第1空中写真画像データ及び第2空中写真画像データの共通特徴点の座標位置及び外部標定要素から三角測量の原理に基づいて共通特徴点の3次元空間における座標位置を算出し、このときの座標位置が第3空中写真画像データに投影される投影位置を算出し、投影位置を含む探索領域を第3空中写真画像データに設定し、探索領域に対して共通特徴点でパターンマッチングし、マッチング率が閾値以上で最も高いときの座標位置から投影位置までの誤差ベクトルを算出し、誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出し、誤差ベクトルが最頻誤差ベクトルとなる位置の投影位置に最頻誤差ベクトルを加えた位置を共通特徴点に対応する対応点に設定するようにした。
(もっと読む)
カメラ状態測定装置およびカメラ状態測定方法
【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
指示位置表示装置および指示位置表示システム
【課題】レーザー光の照射位置の制御や照射位置の制御にかかる装置レイアウトの自由度を向上する。
【解決手段】カメラ10と、レーザーポインタ20が照射するレーザー光の照射位置を含む範囲をカメラ40が撮像するようにレーザーポインタ20とカメラ40とを載置され、レーザーポインタ20とカメラ40とを一緒に回動させるポインタマニピュレータ30と、ポインタマニピュレータの回動を制御する制御装置50と、を備え、制御装置50は、カメラ40が撮像する画像P2とカメラ10が撮像する画像P1とを取得し、画像P2内における画像P1の位置を特徴点マッチングにより特定し、画像P1と画像P2と前記位置とに基づいて、ポインタマニピュレータ30の回動を制御する。
(もっと読む)
情報処理システム及び情報処理方法
【課題】ユーザにとっての利便性により優れた情報処理装置及び情報処理方法を提供すること。
【解決手段】本技術に係る第1の側面である情報処理システムは、1つの検体を同一方向に切断することによって得られた複数の切片が離散的に載置されたスライドを撮影して得た画像データを取得する取得部と、前記取得された画像データにおける個々の前記切片を含む同一形状の複数の検体領域を検出して、個々の前記検体領域それぞれの前記画像データの座標空間における位置を相対的に示す位置情報を算出する検出部と、前記算出された位置情報を記憶する第1の記憶部と、前記記憶された位置情報をもとに前記検体領域間での表示の切り替えを行う制御部とを具備する。
(もっと読む)
21 - 40 / 860
[ Back to top ]