
Fターム[2F069AA17]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 位置;座標 (1,122) | 特殊なもの (146) | 位置ずれ (49)
Fターム[2F069AA17]に分類される特許
21 - 40 / 49
バッチリアクター内の基板ホルダのアライメントを決定するためのセンシングシステム及び方法
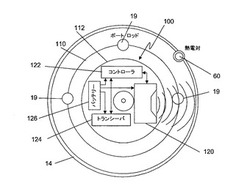
【課題】均一なガスフローパターンにより均一な堆積フィルムを生じる半導体処理システムを提供する。
【解決手段】 半導体基板を処理するために、リモートコントロールされ、基板ホルダのスロット内に挿入されたセンサシステム100が、リアクター等のバッチリアクター内において、ウェハボート等の基板ホルダのアライメントを測定するために用いられる。センサシステム100は、コントローラと通信するためのトランシーバと、プロセスチャンバ外部のデータ収集ユニットとを備える。さらに、センサシステム100は、センサからプロセスチャンバの壁まで距離を測定するための距離センサ120を備える。センサは、プロセスチャンバの周囲360°に渡る範囲の測定を得るために回転される。プロセスチャンバ内の基板ホルダのアライメントは、回転角と、測定された距離又は距離センサ120によって受信された信号との関係に基づいて決定される。
(もっと読む)
車両走行路実形状の算出方法およびその車両走行路の補修量算出方法

【課題】差分法で測定された走行路面データから、ある基準弦に対する走行路面の絶対形状及びその補修量を算出する車両走行路実形状の算出方法およびその車両走行路の補修量算出方法を提供する。
【解決手段】車両走行路実形状の算出方法において、差分法により、連続的に測定された車両の走行路形状データを得て、前記車両の走行路形状データを任意の弦と車両走行路との離れの値に変換し、さらに前記弦を基準とする車両走行路実形状を算出する。
(もっと読む)
取付精度判定装置
【課題】 軸付フランジ部材の取り付け精度の判定をより適正かつ精度よく行なうと共に取り付け精度を判定する際の操作をより簡易なものにする。
【解決手段】 Vブロック22と位置決め部24とにより支持されたプランジャー10の軸14に対して角度αをもって当接するアーム部32を往復運動させる回転駆動部30と、フランジ部12の回転に伴ってその取付精度(垂直度)を検出する検出部40と、検出後に払い出されるプランジャー10を受け止める受け部50とにより取付精度判定装置20を構成し、アーム部32の一方向への運動により軸14の位置決め部24方向に作用する力を用いてプランジャー10を完全に位置決めして取付精度を判定し、アーム部32の他方向への運動により軸14の受け部50方向に作用する力を用いてプランジャー10を払い出す。
(もっと読む)
免震構造物の水平変位計測装置
【課題】 免震層の水平二方向の変位を高い精度で計測することができる簡便な計測装置を提供する。
【解決手段】 水平変位計測装置1は、下部構造物3に固定された第一支持部13に軸支され、第一支持部13を中心として水平面内で回動するロッド11と、上部構造物2に固定された第二支持部14に軸支され、ロッド11上をロッド軸方向に可動する可動部12とからなる計測治具から構成されており、可動部12に内蔵されたポテンショメータとロータリーエンコーダを用いて、ロッド11の回動角θと可動部12のロッド軸方向変位Lを計測する。ロッド11の回動角θと可動部12のロッド軸方向変位Lが計測されれば、免震層Sの水平変位X、Yは、X=L・cosθ、Y=L・sinθとして一意に求めることができる。
(もっと読む)
取鍋搬送台車の停止位置決め方法および装置
【課題】 取鍋が搬送台車の中心に乗っていない場合でも、取鍋のレールは、常に、中継用取鍋移送手段としてのローラーテーブルのローラーの中心と一致するので、取鍋は、円滑に搬送台車からローラーテーブルに移送される。
【解決手段】 搬送台車6に設けられた、搬送台車6走行方向と直行する方向に取鍋2を移送可能なローラーテーブル11上に取鍋2を乗せ、搬送台車6を、搬送台車6の走行方向と直行する方向に設けられたローラーテーブル16Aまで走行させ、そして、ローラーテーブル11上の取鍋2を、ローラーテーブル16Aに移載する際の、搬送台車6の停止位置決め方法において、搬送台車6上の取鍋2の位置を検出し、取鍋2の中心とローラーテーブル16Aの中心とが一致するように、搬送台車6の停止位置を補正する。
(もっと読む)
たわみの測定方法および装置
【課題】 構造物や構造部材のたわみを簡便に測定する測定方法および装置を提供する。
【解決手段】 複数の支柱2、3を被測定物1上に立設し、これら支柱間に基準となる測定用線材6を水平もしくは垂直または被測定物と平行に張設し、支柱間の測定位置に測定器具10を立設し、この測定器具に設けられたマイクロメータ12により光センサ部13を上下させ、このセンサ部が測定用線材を検出したときの測定用線材の高さをマイクロメータにて計測し、マイクロメータによる計測高さと予め求められている前記測定用線材の基準高さとの差を求めることにより被測定物のたわみを測定する。
(もっと読む)
極座標制御方式マシニングセンタ
【課題】 極座標制御方式マシニングセンタにおける基準点の補正方法を提供する。
【解決手段】 極座標制御方式マシニングセンタは、ワークを載置する旋回テーブル50と、旋回テーブル50の旋回中心C0を通るY軸に沿って制御される工具ヘッドを有し、工具ヘッドの工具主軸は、旋回テーブル50に垂直なZ軸に沿って制御される。旋回テーブル50上に基準点誤差量測定用ピン100を取付け、工具主軸に取付けたタッチセンサS1でY軸上の座標を検知して主軸原点位置からの距離Lを演算し、Y軸上の基準点誤差量ΔYを補正する。距離R位置にタッチセンサS1を設定し、ピン100を両側からタッチさせて、角度θ1,θ2を検知する。この角度差からX軸方向の誤差量ΔXを演算して補正する。
(もっと読む)
検査基準設定装置及び方法、並びに、工程検査装置
【課題】工程検査において不良兆候を検出するための検査基準を適切に設定するための技術を提供する。
【解決手段】情報処理装置が、工程検査の各検査項目について抽出された特徴量、及び、最終検査の判定結果を記憶手段に蓄積し、記憶手段に蓄積された複数の製品のデータから、検査項目毎若しくは検査項目の組み合わせ毎に、最終検査で良品と判定された製品群の特徴量の分布と、最終検査で不良品と判定された製品群の特徴量の分布との分離度を算出し、検査項目若しくは検査項目の組み合わせの中から、その分離度の大きさに基づいて、検査基準を再設定すべき検査項目を選択し、選択された検査項目に対して新たな検査基準を設定する。
(もっと読む)
段ボールシートの斜行検出装置及び検出方法並びにスリッタスコアラ
【課題】 段ボールシートの斜行検出装置及び検出方法並びにスリッタスコアラに関し、スリッタスコアラ内部で発生する段ボールシートの斜行を検出できるようにする。
【解決手段】 スコアラ10よりもシート搬送方向上流側に設けられ、段ボールシート5のシート幅方向における位置を検出する第1の位置検出手段20と、スリッタ11よりもシート搬送方向下流側に設けられ、段ボールシート5のシート幅方向における位置を検出する第2の位置検出手段22と、第1の位置検出手段20及び第2の位置検出手段22により検出された段ボールシート5の位置情報に基づいて段ボールシート5の斜行量を算出する算出手段27aとをそなえて構成する。
(もっと読む)
エンコーダ・エラー判定
ライドハイト検出デバイスは、エンコーダの読み取りヘッド部(40)およびスケール(10)の間の間隔の測定を行うために記述される。該ライドハイト検出デバイスは、エンコーダの読み取りヘッド部(40)に設けられたあるいは取り付けられるライドハイトセンサ(41;42;46;50)を含む。そのようなデバイスの、エンコーダの読み取りヘッド部(40)への一時的あるいは永続的な取付は、また、記述される。好ましい実施形態において、回転式エンコーダは記述され、ライドハイト検出デバイスはその偏心度を測定するために用いられる。  (もっと読む)
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】欠陥検査における各処理を実行する処理部の負担を軽減することができる長尺体の欠陥検査方法および欠陥検査装置を提供する。
【解決手段】被検査物1を撮像部4で撮像して得られる画像データに基づいて、画像処理回路5で欠陥を検出する。撮像部位に対して幅方向に位置する被検査物1のエッジ位置をエッジ検出部7で検出し、検出したエッジ位置と基準エッジ位置とのずれ量、即ち蛇行量を蛇行量算出回路8で求める。画像処理回路5で欠陥が検出されたときは、検出された欠陥について基準エッジ位置を基準とした座標を欠陥座標算出回路6で求める。座標補正回路9は、求めた座標を前記蛇行量に基づいて補正して補正座標を出力する。
(もっと読む)
ホイールアライメント方法及び測定用ホイール
【課題】ホイールアライメントの一環として車体幅方向の中心とホイールとの位置関係を測定することで車体本体とホイールの位置関係を適切に計測できるようにすることを課題とする。
【解決手段】ホイールアライメント方法として、車体中心設定工程によって測定するホイールが取り付けられた車体の幅方向の中心線を設定し、また、測定工程によって、前記中心線を通る車体を2分する中心平面と、前記ホイールの所定位置との距離を直接的もしくは間接的に測定する。
(もっと読む)
位置精度評価方法及び位置精度評価装置
【課題】 円盤形状の第1の材料内に、第2の材料からなる部材を配置した場合に、実際の第1の円及び第2の円の設計位置に対する位置精度を評価する。
【解決手段】 (1)第1の材料の外周をほぼ均等にn個に分割した位置を測定し、(2)円盤形状の第1の材料の、対応する円弧上の位置を測定し、(3)同様、第2の円の円弧上の位置を測定し、(4)第1の円弧上の位置を始点とし外周上の位置を終点とする第1のベクトルから第nのベクトルを算出し、(5)第2の円弧上の位置を始点とし第1の円弧上の位置を終点とする第(n+1)のベクトルから第2nのベクトルを算出し、(6)(4)のベクトルを加算して第1の合成ベクトルを算出し(7)(5)のベクトルを加算して第2の合成ベクトルとし、(8)第1の合成ベクトルと第2の合成ベクトルを加算して得られる第3の合成ベクトルに基づいて、第1の外周に対する第1の円及び第2の円の位置精度を評価する。
(もっと読む)
アラインメント精度評価方法及び装置
【課題】処理対象物に所定の処理を施す処理装置におけるアラインメントの精度を高精度に評価する。
【解決手段】露光ステージ18に装着された基板Fのアラインメントマーク60a〜60dを読み取り、アラインメントマーク60a〜60dを基準として、一定の関係からなる複数の異なるテストパターンを基板Fに繰り返し露光記録し、テストパターン同士の位置関係を比較してアラインメントの精度を評価する。
(もっと読む)
形状特性取得方法、プログラム及び記録媒体
【課題】半導体ウェハの外周部の形状特性を正確に取得することができる形状特性取得方法及びプログラムを提供すること。
【解決手段】半導体ウェハの表裏面の径方向に沿った形状データを取得し、この形状データから半導体ウェハの厚みの中点を算出し、前記中点から2次の近似曲線である基準曲線を算出する。そして、前記半導体ウェハの表面及び裏面の形状データから、前記基準曲線の成分を除去したプロファイルを求め、さらに、半導体ウェハの外周部を除く前記プロファイルの所定の区間を1次関数でフィッティングした後、このフィッティングしたプロファイルから、前記1次関数の成分を差し引く。これにより、前記所定の区間が略変位のない基準線27を有するプロファイル28を得ることができる。そして、この基準線27に対する半導体ウェハの外周部の所定位置におけるずれ量T1,T2を求める
(もっと読む)
被測定物の振れ測定装置及び方法
【課題】段取り作業の効率化を図ると共に、測定精度を向上させることにある。
【解決手段】モータ1により水平回転駆動される回転テーブル2上にその中心軸に直交する回転平面上で互いに直交するX方向及びY方向に移動可能な移動調整テーブル4を載せ、その上に被測定物10を支持する複数個のジャッキ3が搭載テーブルを載せて構成された回転部と、複数のアームを鉛直方向に移動可能に、且つ水平方向に移動可能にそれぞれ支持し、これら各アームの先端部に被測定物の面や円弧面を計測する測定器8を取付けて構成された測定器移動部と、回転テーブル2の回転軸線上で互いに交差するスリット状の複数のレーザ光を照射するレーザ発生器9と、被測定物の予定角度位置での面の高さや円弧面における半径方向の長さの測定値がそれぞれ取込まれ、被測定物の傾き量や回転テーブルの中心に対する被測定物の中心の偏心量を求める演算処理部20と備える。
(もっと読む)
溶接品質検査方法
【課題】 記録媒体カートリッジの溶接品質検査装置において、溶接品質の検査を効率良く行って記録媒体カートリッジの生産効率を高めるようにする。
【解決手段】 溶接前に、上下シェルハーフ3,4間の位置ずれを測定手段50で測定し、この測定により得られた溶接前測定量を比較手段60が予め定められた溶接前基準量と比較する。判定手段65は、溶接前測定量が溶接前基準量より大きい場合に上下シェルハーフの保持を不良と判定して溶接が中止され、溶接前測定量が予め定められた溶接前基準量以下の場合に上下シェルハーフの保持を良と判定して溶接が実施される。溶接後に、再び測定手段50が位置ずれの測定を行って、比較手段60が、この測定により得られた溶接後測定量を予め定められた溶接後基準量と比較し、判定手段65が溶接後測定量が溶接後基準量より大きい場合に溶接を不良と判定し、溶接後測定量が溶接後基準量以下の場合に溶接を良と判定する。
(もっと読む)
位置合わせ方法及び露光方法
【課題】ウエハWの位置合わせを精度良く行う。
【解決手段】ウエハW上の複数のショット領域SAp各々の設計上の位置座標(x,y)を独立変数とし、ステージ座標系におけるそのショット領域SApの位置に関する情報を従属変数とするモデル式(ウエハW上の複数のショット領域SApの配列を規定するモデル式)の各項の係数を求めるために位置座標を計測するサンプルショット領域SAgとして、同心円C1、C2上に均等に配置されたショット領域SApを選択する。このようにすれば、ウエハWの略中心を通る任意の直線方向に沿って、サンプルショット領域SAgを均等に点在させることができるため、それらの計測結果から、統計的手法を用いて、上記モデル式の各項の係数を求める際に、そのモデル式により表現されるモデルと、真のモデル式との推定誤差を低減することができる。
(もっと読む)
測定装置装着構造
【課題】
本発明は、構造物に発生する変形の進行状況を経時的、または経年的に把握するために
用いられる測定装置装着構造に関するものである。
【解決手段】
離隔した1対の対象物間の距離を測定する測定装置1を着脱自在に装着しうる測定装置装着構造であって、前記1対の対象物のいずれか一方の対象物に一体に固定される装着ホルダー20と、前記測定装置1が着脱自在に装着できるとともに、前記装着ホルダー20が着脱自在に嵌合できる連結アダプター30と、前記連結アダプター30を前記装着ホルダー20に一体に固定できる固定手段とを具備した測定装置装着構造。
(もっと読む)
車輪状態監視装置および車輪状態監視方法
【課題】 アライメントずれの検出精度を高める。
【解決手段】 車輪に接地される作用力センサは、車輪に対して路面に平行な方向に作用する力である作用力を検出する。アライメント発生力算出部112は、検出された作用力を使用して、ホイールアライメントに起因して車輪の接地部分に発生するアライメント発生力を算出する。推定値算出部106は、予め格納されているホイールアライメントの設定値を参照して、アライメント発生力の推定値を算出する。アライメント判定部116は、アライメント発生力と推定値の差分を取り、この差分と予め定められたしきい値とを比較してホイールアライメントが設定値からずれているか否かを判定する。
(もっと読む)
21 - 40 / 49
[ Back to top ]