
Fターム[2F069GG67]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 測定子の数 (697) | 多数 (63) | 1次元状 (19)
Fターム[2F069GG67]に分類される特許
1 - 19 / 19
多点検査装置と方法
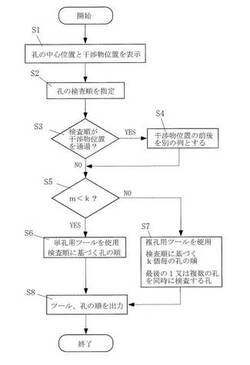
【課題】単孔用ツールと複孔用ツールを併用し、多数の箇所を最短時間又はこれに近い短時間で検査することができる多点検査装置と方法を提供する。
【解決手段】単孔用ツール14aと、複孔用ツール14bと、ツールのいずれかを孔2に対して位置決めする位置決め装置12と、各孔2の中心位置と干渉物4の位置とを記憶する記憶装置18とを備える。(A)各孔2の中心位置と干渉物位置を表示し、(B)指定した孔2の検査順が干渉物位置を通過する場合に、その前後を別の列として扱い、(C)検査順の各列に含まれる孔数mが、複孔用ツール14bで同時に検査する孔数kより小さい場合に、単孔用ツール14aの使用と、検査順に基づく孔2の順を決定し、(D)m≧kの場合に、複孔用ツール14bの使用と、検査順に基づくk個毎の孔2の順を決定し、かつkより少ない最後の1又は複数の孔を複孔用ツール14bで同時に検査する孔を決定する。
(もっと読む)
表示装置、電子機器、およびプログラム

【課題】互いに異なる複数の面に表示部を有する場合であっても、それぞれの表示部の表示面に対面する複数の方向に位置する操作者に応じて適切な制御をすることができる表示装置を提供する。
【解決手段】表示装置は、互いに表裏の位置関係に表示面が配置されている第1表示部および第2表示部と、第1表示部または第2表示部の表示面に対する操作者の相対位置を検出し、検出した相対位置に基づいて、第1表示部および第2表示部のうち、操作者に対面する表示部の表示面が表面であると検出するとともに、他方の表示部の表示面が裏面であると検出する検出部と、検出部により検出された結果に基づいて、表面の表示部または裏面の表示部の表示を制御する制御部と、を備える。
(もっと読む)
物品の形状検査装置
【課題】検査体において設計形状との誤差が公差から外れている箇所を検査体上で容易に特定できる物品の形状検査装置を提供することを目的とする。
【解決手段】XY平面に設置されたベースと、ベース上に設置された検査体の寸法を計測するセンサユニット3a,3bと、検査体において、センサユニット3a,3bによって計測された検査体の形状実測値と予め設定されている設計値との誤差が公差を外れている箇所を特定する処理装置10と、処理装置10によって誤差が公差を外れていると判定された箇所にマーキングを行う印字ノズルとを具備する物品の形状検査装置を提供する。
(もっと読む)
計測治具および配管の断面形状計測方法
【課題】配管周りのスペースが狭くても、安価な構成で、配管の軸方向に直交する断面の外径を好適に計測することができる計測治具および配管の断面形状計測方法を提供する。
【解決手段】エルボ1の軸方向に直交する断面の外径を計測する計測治具5であって、エルボ1に取付可能に構成され、エルボ1の外径よりも大径となる円形の計測枠11と、計測枠11に形成され、ダイヤルゲージ30を挿入可能に、計測枠11の径方向に貫通形成した計測穴12と、を備え、計測枠11は、真円との誤差が予め計測され、計測穴12は、計測枠11の周方向に複数設けられている。
(もっと読む)
変位センサシステムに適用する拡張ユニット
【課題】センサシステムを構成するアンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能なセンサシステムに適用される拡張ユニットを提供すること。
【解決手段】アンプユニットに連装される拡張ユニットには、計測データ蓄積メモリと、伝送ラインを介して到来する計測データを取得して前記メモリに蓄積する計測データ取得手段と、蓄積された一連の計測データを所定のアルゴリズムに従って解析するデータ解析手段と、データ解析結果を判定する判定手段と、判定結果に対応する制御信号を外部へと出力する出力手段とを具備する。計測アルゴリズムが部品化された複数の処理プログラムが拡張ユニットに組み込まれており、パソコンからの指示に従って、処理プログラムが選択され、選択された処理プログラムが所定の順序で実行される。
(もっと読む)
情報処理装置およびその動作方法
【課題】 従来技術によると、髪の色の異なり等によって、音源(口唇)の位置を推定できない場合がある。
【解決手段】 上記課題を解決するために本発明に係る情報処理装置は、三次元の領域内に存在するオブジェクトと、基準となる面との距離を示す距離画像を取得し、前記距離画像に基づいて、前記距離が極値となる前記領域内の第1の位置を特定し、前記第1の位置から、前記オブジェクトが存在している方向に所定距離離れた第2の位置を特定し、前記第2の位置に基づいて、音源の位置を決定する。
(もっと読む)
フレキシブルセンサチューブ
【課題】瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
金属帯板の形状測定装置
【課題】コンパクトな構造で、金属帯板の材質によらず精度よく形状を測定することができ、データ伝送においても外乱が小さい金属帯板の形状測定装置を提供する。
【解決手段】金属帯板1が巻き付けられるように設置され、表面に1本以上の螺旋溝30が形成され、螺旋溝30に径方向に貫通する穴である溝部穴40が2箇所以上形成される中空円筒10と、中空円筒10に嵌合する薄肉円筒20と、中空円筒10の内部を貫通し、この中空円筒10を回転可能に支持する静止軸50と、静止軸50の軸方向におけるそれぞれの溝部穴40に対応する位置に設置され、金属帯板1を薄肉円筒20に巻き付けたときの薄肉円筒20の変位を測定するセンサ60と、センサ60により測定した薄肉円筒20の変位から、金属帯板1の板幅方向における張力の分布を演算する演算手段120とを備えた。
(もっと読む)
設備機器
【課題】 床からの寸法位置を検出し、その測定結果から所定情報を演算する演算手段を有することにより、使用者の成長に関連する情報を報知することを可能とする。
【解決手段】 本発明では、ジャッキまたはレールに取り付けられている寸法位置検出手段によって大便器の高さ位置を測定し、その結果から下肢長さ寸法を推定演算している。大便器の寸法位置検出手段において測定された高さ位置情報は、制御手段の中にある報知手段によって使用者に報知され、使用者は報知された位置情報をもとに上下手段を操作することにより、便器を最適な位置まで移動させることができ、下肢長さ寸法を推定演算することができる。
(もっと読む)
金属帯板の形状測定装置
【課題】金属帯板の形状を板幅端部まで精度良く測定でき、調整も容易で部品の交換だけで長期間使用できる金属帯板の形状測定装置を提供する。
【解決手段】金属帯板1が走行するラインに両端を回転自在に支持され金属帯板1に押し込むように設置されるロール10,100において、ロール10,100は、少なくとも1本以上の円周方向から傾斜した方向の溝21と溝21以外の部分であるランド部22が表面に形成された内側ロール20、又は、少なくとも2本以上の円周方向の溝201と溝201以外の部分であるランド部202が表面に形成された内側ロール200に円筒40を嵌合し、ランド部22,202にはロール10,100の軸方向に穴23を形成し、穴23にランド部22,202に作用する金属帯板1への押し込み荷重を測定するセンサー30を設置した。
(もっと読む)
金属帯の形状測定装置
【要 約】
【課 題】 極薄金属帯の形状を精度良く測定する形状測定装置を提供する
【解決手段】 金属帯を垂直方向に搬送する搬送手段と、金属帯に付加される張力を制御する張力制御手段と、金属帯の搬送速度を測定する速度測定手段と、非接触式距離計によって得られた測定データから金属帯の形状指標を演算する演算手段と、を有する金属帯の形状測定装置。
(もっと読む)
背面形状分類判定方法及び背面形状分類判定装置
【課題】判定対象の背面形状に対して所定の分類中最も的確な分類を客観的に判定することができる背面形状判定分類方法及びそれを用いて自動的に判定を行う背面形状分類判定装置を提供することにある。
【解決手段】背面形状分類判定装置1は、人体背面の凹凸を関数化した背面形状データを複数のクラスタに分けて記憶した背面形状データベースを構成する記憶部11と、判定対象の背面形状を測定して当該判定対象の背面の凹凸を関数化した背面形状データを取得する背面形状取得手段と、前記判定対象の背面形状データと前記複数のクラスタに含まれる背面形状データとの間の距離に基づいて前記判定対象の背面形状が属するクラスタを決定する判定手段としての機能を備えた演算処理部11と、分離判定に基づいてレポートを表示する表示部12とを備えている。
(もっと読む)
視線方向判定装置
【課題】運転者の顔の向きを精度よく判定可能な視線方向判定装置を提供すること。
【解決手段】シート3,5、6の着座者の視線方向を判定する視線方向判定装置1において、着座者の頭部とヘッドレスト5との間の頭部距離を検出する頭部距離検出手段30と、頭部距離検出手段30により検出された頭部距離に基づき着座者の視線方向を判定する視線方向判定手段20と、を有することを特徴とする。
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】欠陥検査における各処理を実行する処理部の負担を軽減することができる長尺体の欠陥検査方法および欠陥検査装置を提供する。
【解決手段】被検査物1を撮像部4で撮像して得られる画像データに基づいて、画像処理回路5で欠陥を検出する。撮像部位に対して幅方向に位置する被検査物1のエッジ位置をエッジ検出部7で検出し、検出したエッジ位置と基準エッジ位置とのずれ量、即ち蛇行量を蛇行量算出回路8で求める。画像処理回路5で欠陥が検出されたときは、検出された欠陥について基準エッジ位置を基準とした座標を欠陥座標算出回路6で求める。座標補正回路9は、求めた座標を前記蛇行量に基づいて補正して補正座標を出力する。
(もっと読む)
検査装置及び検査方法
【課題】 検査の信頼性が向上し、欠陥有無判定の自動化ができ、更に、検査の高速化が可能な検査装置及び検査方法を提供する。
【解決手段】 検査対象であるカム7の回転方向周表面を検査する検査装置1は、カム7の表面3次元情報を取得するセンサを備えたセンサヘッド19を有し、センサがカム7の回転に伴いカム7面に対し常に垂直となるように、Z軸上下駆動モータ16を介しセンサヘッド19が上下動できるように構成されている。
(もっと読む)
高さデータ推定方法、高さデータ推定用プログラム及び3次元形状測定装置
【課題】 被測定物の測定面の任意の位置における高さデータを高精度にて推定する高さデータ推定方法、高さデータ推定用プログラム、及び3次元形状測定装置を提供する。
【解決手段】 複数のサンプリング位置における高さデータに関して、設計データと測定データとの誤差値を求め(S6)、求まった誤差値にて形成される形状の関数を求める(S6)。そして、該関数に基づいて、被測定物の測定面の任意点における推定誤差値を求めるようにしている(S7)。したがって、上記推定誤差値の精度は、測定データの高さデータに基づき作成される面の曲率半径及び傾斜面角度とは無関係となり、一定となる。よって、従来に比べて、高い精度にてなる推定誤差値を得ることが可能となる。
(もっと読む)
不規則な形状を有するアイテムのセグメントの体積に応じた数値を表示する装置及び方法
支持面上に支持されたセンサ・バーを当該支持面上の置かれたアイテム上を通過させることを含む、不規則な形のアイテムのセグメントの重量または価格を表示する装置と方法。小型で手で持てるセンサの実施形態によって、センサ・バーの支柱が支持面に常に接触したまま、アイテムの表面を横切って動くので、オペレーターはセンサ・バーをアイテムの表面上で様々な線形または非線形運動で動かすことができる。センサ・バーは1つ以上のセンサを含み、センサがアイテムを横切るときに、アイテムの高さに対応した信号を発生する。同時に、変位検出装置が支持面に対するセンサ・バーの変位に対応した信号を発生する。これらの信号を信号処理装置で処理し、次の位置でセンサ・バーの後方に位置する未切断のアイテムの体積を測定する。これらの累積体積のそれぞれの測定は、アイテムの特別な種類に対する密度因子に基づき、重量数値に連続的に変換することができ、それによって、センサ・バーがアイテム上を往復運動する時に、重量と価格(重量に基づく)の数値が連続的に表示され、オペレータは、アイテムを切断する前に、アイテムの外見、重量、及び価格に基づいて所望する特定部位通りに、見つめている顧客の具体的要求に対処することできる。  (もっと読む)
(もっと読む)
形状加速度計測装置及び方法
【課題】 連続したリアルタイムの計測ができ、かつ/または、動的形状を追跡できる。
【解決手段】 少なくとも1つのフィールド測定センサと、基体内の少なくとも1つの曲率測定センサとを有したセンサアレイであって、フィールド測定センサはフィールドに対して基体の配向データを得ることができ、曲率測定センサは動的・静的形状と、地質学的、構造的、生物学的物体の振動を測定するための、構造体内の相対的配向データを得ることができる。
(もっと読む)
アイテムの選択セグメントの体積に対応する数値表示を示すための装置及び方法
【解決手段】アイテムの未切断選択セグメントの重量又は価格を表示する装置及び方法は、位置指示部材を、支持面上に位置するアイテム上方を通過させることを含む。位置指示部材は、一つ以上のセンサを有し、そのセンサが、上記部材が基準位置からアイテム上方の選択された他の位置まで横断される際に、アイテムの連続する横断面輪郭に対応し、アイテムの選択セグメントを規定する信号を生成する。同時に、好ましくは一つ以上の微小構造電子機器(MEMS)加速度計装置から構成された作動検出器配置構造は、アイテムに沿って位置指示器支持部材が移動したときにその作動に対応する信号を生成する。これらの信号は、指示部材の選択された連続位置間に位置するアイテムの未切断選択セグメントの体積を決定すべく、信号処理装置で処理される。これらの累積的な体積決定のそれぞれは、数値重量に変換される、又は、特定のセグメントをアイテムから切断する前に、重量又は価格の情報が見ている顧客に同時に提供される。可視光帯は、センサ・バーからアイテムの特定のタイプの密度要素に基づく部分価格値上に投影され、それにより、部材が上記アイテムに沿って横断されたときに数値的な重量又は(重量に基づく)価格値が表示され、したがってアイテムのオペレータが数値表示に対応する選択セグメントの境界を観察者に明確に示すことが可能となる。 (もっと読む)
1 - 19 / 19
[ Back to top ]