
Fターム[2F069HH01]の内容
測定手段を特定しない測長装置 (16,435) | 測定器機 (1,161) | タッチプローブ (162)
Fターム[2F069HH01]に分類される特許
141 - 160 / 162
センサ

【課題】測定力や加速度の二軸以上の方向成分を直接、かつ、個別に検出可能であり、さらに、従来のものより簡素化、かつ、小型化を達成できるセンサを提供すること。
【解決手段】辺構成要素31…によって四角形に形成された構造体2Aの一方の角部を移動部材6に固定し、他方の角部にスタイラス5を装着する。一対の辺構成要素31,32に、そのスタイラス側端を反スタイラス側端に対してZ軸方向へ平行変位可能とする平行リンク機構31Z,32Zを形成する。他対の辺構成要素41,42に、そのスタイラス側端を反スタイラス側端に対して、それぞれX軸方向、Y軸方向に平行変位可能とする平行リンク機構41X,42X、および、41Y,42Yを形成する。各平行リンク機構は辺構成要素に薄肉状に形成された少なくとも2箇所の弾性ヒンジ部35Zと、2つの弾性ヒンジ部35Zの間に形成された2本のリンク片36Zとを含んで構成される。
(もっと読む)
三次元形状計測機のセンサ原点のキャリブレーション方法

【課題】直交3軸方向に移動可能な移動機構に設けられたローリング及びピッチング回転可能な回転ヘッドに、接触位置センサに代えて、非接触式位置センサが取付け可能な三次元形状計測機において、ローリング及びピッチング回転角に対する非接触式のセンサ原点位置のキャリブレーションデータを簡単に作成する。
【解決手段】接触式用キャリブレーションデータにより較正した基準ローリング回転角及び基準ピッチング回転について、回転ヘッド中心位置Ooを固定した状態で、非接触位置センサ20により、座標値が既知の基準点を計測することによりセンサ原点位置Osの基準座標値を算出し、その回転ヘッド中心位置Ooに対するX,Y,Z軸方向の基準オフセット量H,L,Wを算出し、較正したローリング及びピッチング回転角θr,θpについてH,L,Wに対するオフセット量を算出して基準座標値を補正することにより、センサ原点位置Osの座標値(Xso,Yso,Zso)のキャリブレーションデータを作成する。
(もっと読む)
プローブ用の測定ヘッド
【課題】 割り出し精度を損なうことなしに方向付け可動要素が効率的にガイドされ、触針の軌跡が完全に制御される測定ヘッドを提供する。
【解決手段】支持要素(30)と、固定位置と固定解除位置との間で第一軸(B)の方向に摺動可能な、第一可動要素(40)と、支持要素(30)と接続された第一ガイド部材(84)と、第一可動要素(40)と接続された第二ガイド部材(82)とを備え、第一可動要素(40)が固定位置にあるときに、第一ガイド部材(84)と第二ガイド部材(82)とが接触せず、第一可動要素(40)が固定解除位置にあるときに、第一可動要素(40)が支持要素(30)に対して第一軸(B)を中心に回転できるように、第一ガイド部材(84)が第二ガイド部材(82)と組み合う。
(もっと読む)
倣いプローブの校正プログラムおよび校正方法
【課題】 倣いプローブの校正のための自動化が可能な校正プログラムと校正方法を提供すること。
【解決手段】 校正装置を構成する計算機に実行させることにより、被測定物の表面性状を少なくとも2軸方向で測定する倣いプローブを校正するプログラムであって、各軸測定範囲を含む校正条件を入力する準備ステップと、真直測定を行って誤差を収集するステップと、指示誤差と真直度誤差と回転誤差とを算出する誤差算出ステップと、直交データを収集する直交データ収集ステップと、直交誤差を算出する直交誤差算出ステップと、を計算機に実行させる。
(もっと読む)
座標測定機械用プローブヘッド
【課題】小型化された探針と膜状センサーシステムとを備えた構造的ユニットの交換が単純化され、操作の高い信頼性を維持して実行できるようにする。
【解決手段】交換可能で小型化された探針108を有する座標測定機械のためのプローブヘッド。前記探針108は剛性があり、かつ前記探針108に力が作用したときに所定の仕方で撓むことのできる膜状センサーシステム100と共に構造的ユニット116を形成している。前記構造的ユニット116はプローブホルダー70に恒久的に結合されており、また前記探針108を交換する際に前記プローブホルダー70と一緒に取り扱うことができる。更に前記センサーシステム100は、たわみを検出するための電気的センサー要素114を有することができる。前記構造的ユニット116を前記プローブヘッド上に機械的に固定し、また前記センサー要素114と電気的に接続するために、別々の手段が備えられる。  (もっと読む)
(もっと読む)
接触式プローブおよび形状測定装置
【課題】コンパクトな磁気回路によって、被測定物に接触するプローブの自重をキャンセルする力とプローブの変位によって変化するばね要素としての力を発生させる。
【解決手段】箱形状のヨーク7の方形の開口部に、プローブシャフト4と一体である鉄心9および永久磁石8を配設して、一定の曲率を有するヨーク7の内面に永久磁石8を対向させ、両者のすきまを流れる磁束により、形状測定装置の計測軸15に対するプローブ移動方向であるZ方向に変化するばね成分を含む力を発生させる。ヨーク7が箱形状であるためにヨーク7内に磁気回路がシールドされ、近傍に鉄系材料の部材が配設されても磁束が乱されることはない。
(もっと読む)
測定制御系における制御回路の制御パラメータ設定方法および測定装置
【課題】 測定制御系におけるハンチングの発生を的確に防止するゲインを高精度に設定でき、測定を安定かつ迅速に行うことを可能にする、制御回路のゲイン設定方法を提供すること。
【解決手段】 N個のゲインGiを順次制御回路23に仮設定し、スタイラス131を被測定物Wに接触させて仮測定を行う。このときセンサ検出回路21から出力されるセンサ検出信号を、フィルタ31によって濾波し、制御回路23を含む閉ループLに生じるハンチングの周波数に対応する周波数成分のみを取り出す。この周波数成分の大きさSiを基準値S0と比較し、Sj<S0となって閉ループLにハンチングを生じさせないGjを抽出し、さらに、測定の速応性の向上等の観点から各Gjのうち最大のものを制御回路23に設定する。したがって、この設定ゲインによれば、測定を安定にかつ迅速に行うことができる。
(もっと読む)
3点支持装置および3次元形状計測装置
【課題】高剛性で安定性のよい固定体接触支持と、低剛性で自由度の高いキネマティックマウント等を切り替え自在な3点支持装置を実現する。
【解決手段】被支持物体1を支持ベース2上に3点支持する3つの脚部3は、それぞれ、固定支柱12を被支持物体1の下面から突出する脚11に接触させて3点支持する高剛性の支持形態と、板バネを含む弾性支持手段14によって支持されたスラストベアリング15を脚11と一体であるフランジ13に接触させて、X、Y、ωX、ωY方向の4自由度をもつ低剛性で支持する支持形態とを有し、2つの支持形態をリフト機構であるベローズシリンダ16によって切り替える。
(もっと読む)
センタリング装置
本発明によってはセンタリング装置、特に探査測定装置(1)のためのセンタリング装置(11)が提案されている。このセンタリング装置は装置軸線(7)を規定する装置保持体(3)と、シャフト軸線(43)を規定する保持シャフト(41)と、装置保持体をシャフト軸線に対し平行な装置軸線でシャフト軸線に対し半径方向に移動可能ではあるがしかし固定可能に保持シャフトに保持するセンタリング保持装置とを有している。センタリング保持装置(45)はシャフト軸線(43)と装置軸線(7)を中心として分配された、前記軸線(7,43)に沿って延びる1つの平行四辺形リンク領域(59)又は複数の平行四辺形リンク領域を有する平行四辺形案内装置として構成されている。このような平行四辺形案内装置は保持シャフト(41)及び/又は装置保持体(3)に一体に統合されて成形されることができる。これは製作費用を低下させる。平行四辺形案内装置の周方向に分配された調節ねじ(69)はシャフト軸線(43)を装置軸線(7)に対して調整することを可能にする。  (もっと読む)
(もっと読む)
高速走査用プローブ
座標位置決定装置2のアーム6に取り付くためのハウジング16と、スタイラス支持部材28に取り付けられたスタイラス10とを備える測定プローブ5。
スタイラス10とスタイラス支持部材28は、ハウジング16に関して偏向可能である。第1のトランスデューサシステム40−48は、座標位置決定装置2のアーム6に対するスタイラス支持部材28の移動を測定する。第2のトランスデューサシステム38は、スタイラス支持部材28に対するスタイラスチップ12の移動を測定する。全スタイラス偏向の測定が、第1および第2のトランスデューサシステムからのデータを組合せることにより達成される。  (もっと読む)
(もっと読む)
加工物検査方法
三次元座標測定装置に取り付けられた非接触式プローブを使用してアーチファクトを検査する方法を提供する。アーチファクトは、最初に接触式プローブを用いて測定され(28)、次いで、非接触式プローブを用いて測定される(32)。接触式プローブおよび非接触式プローブを用いて取得された測定値の間の差に対応する誤差マップまたは関数が生成される(34)。この誤差マップまたは関数は、プローブを較正するのに使用することができる。あるいは、次のアーチファクトは、非接触式プローブを用いて測定され(36)、誤差マップまたは関数を使用して測定値が補正される(38)。  (もっと読む)
(もっと読む)
試料傾け補助具
【課題】 本発明は、簡単に大きく傾斜角度を変更できる試料傾け補助具を提供することを目的とする。
【解決手段】 試料の計装時等において、試料を傾けるための試料傾け補助具は、台となるベースと、前記ベースに回転可能に支持された回転体と、前記ベースに移動可能に支持された可動体と、前記可動体を一軸方向に移動させる駆動体とを具備する。前記可動体が移動することにより、前記回転体の前記ベースに対する傾きは変化する。前記可動体の移動方向を前記ベースの表面に平行にした。また、少なくとも前記ベースと前記可動体と前記可動体とは磁性材料により形成されており、前記可動体に磁石を取付ける。
(もっと読む)
表面測定用プローブの使用法
測定用プローブが取り付けられる機械を用いて人工物を計測する方法。この方法は、以下のステップ、人工物の表面上の1つ以上の地点の近似的な位置を決定するステップと、この近似的な位置を用いてプローブおよび人工物のうちの少なくとも一方をそのプローブおよび人工物における所望の1つ以上の相対位置に移動させるステップと、該位置において人工物の表面上の地点の1つ以上の表面計測値を取得するステップであって、1つ以上の表面計測値が取得される間、そのプローブと人工物との間の相対移動がないステップと、その計測値からのデータを用いて、動誤差が実質的に低減されるその表面上の1つ以上の地点の位置を決定するステップと、を有する。 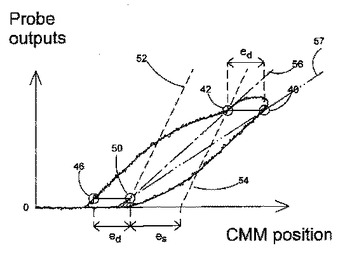 (もっと読む)
(もっと読む)
座標測定装置及び物体の位置を測定するための方法
測定される物体(15)に接触するためのプローブを有する座標測定装置。プローブは、前記物体(15)に接触するためのセンス部材(18)と、支持ユニット(13)と、前記センス部材(18)を前記支持ユニット(13)に接続する支持素子(25)と、検出部材(22)と、前記検出部材(22)の位置を検出するための検出手段(23)とを有する。前記検出部材(22)は接続素子(26)が持ち、前記接続素子(26)は前記センス部材(18)に取り付けられる。  (もっと読む)
(もっと読む)
探針ヘッドを有する装置及び測定器
【課題】 現在取り付けられている探針ヘッドを認識できる装置を提供すること。
【解決手段】 着脱自在の探針ヘッド15を有し、ワークを測定するための装置であって、探針ヘッド15を取り付けるための受け部17.1と、該受け部17.1の所定の位置に配置されたセンサ17.2と、探針ヘッド15に設けられた幾つかの相対部材とを設けた。また、探針ヘッド15が受け部17.1に取り付けられると、相対部材はセンサ17.2と互いに作用し、探針ヘッド15のコード化を相対部材の位置を調整して設定するようにした。
(もっと読む)
表面形状測定触針及びその製造方法
【課題】 本発明は表面精密測定技術の領域における表面形状測定触針を提供することを目的とする。
【解決手段】 本発明にかかる触針は、開口端と室を有するパイプと、第一端及び第二端を有するピンと、溝を有する球状触頭と、を含む。また、前記ピンの第一端は前記触頭の溝に差し込んで固定され、第二端は前記パイプの開口から室に差し込んで固定される。前記ピンと球状触頭は接着剤または半田を介して固定される。前記ピンと前記パイプは接着剤、半田又はリベットを介して固定される。前記球状触頭は真円球である。なお、本発明にかかる触針は測定の精確度が高く、使用時間が長いという長所がある。また、本発明は前記触針の製造方法も提供する。
(もっと読む)
ロール状物の周面形状測定装置
【課題】ロール状物の周面形状を簡便に且つ高精度に測定できるロール状物の周面形状測定方法を提供する。
【解決手段】磁気テープ原反ロール等のロール状物14の周面形状を測定するロール状物の周面形状測定装置。ロール状物の両端部の軸14Aが載置される一対の受け部62と、受け部のそれぞれをロール状物の軸方向に移動させる受け部水平移動手段と、受け部のそれぞれを昇降させる受け部鉛直移動手段と、プローブの先端部16Aがロール状物の表面に当接する方向に付勢され、検出変位量に基づいてロール状物の周面形状を測定する位置センサ16と、位置センサをロール状物の軸方向に移動させるセンサ移動手段18と、を備える。
(もっと読む)
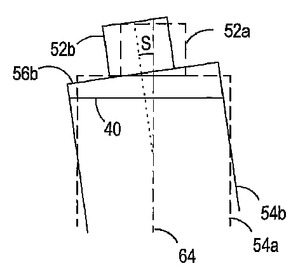
走査方法
走査方法が開示され、それは、試料ホルダ(14)および相対移動可能な走査デバイス(18)を有する走査システム(10)を備え、試料ホルダ(14)に配置された対象(22)の少なくとも一部の走査を行い、試料ホルダの向きを確定し、その向きを使用して走査からのデータを解釈する工程を含み、それによって、その向きは、試料ホルダの表面の走査からのデータを使用して確定される。その向きは、試料ホルダの面(56b)を画定することによって確定でき、この面は、境界(76a、76b)によって制限されてもよい。
 (もっと読む)
(もっと読む)
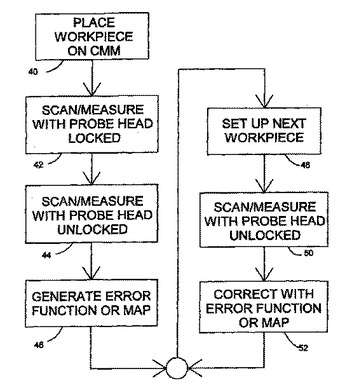
座標測定機における誤差補正方法
関節プローブヘッドを較正する方法であって、関節プローブヘッドに取り付けられたワークピース検出プローブによって、既知の寸法を有する疑似品を測定するステップを備え、前記関節プローブヘッドがアンロックされている方法。疑似品の測定された寸法と既知の寸法との差に応じて、誤差関数又はマップが発生される。アンロックされた関節プローブヘッドによって以降のワークピースが測定され、対応する修正が適用される。疑似品の真の寸法は、関節プローブヘッドに取り付けられたプローブによって疑似品を測定することにより決定されてもよく、この場合、関節プローブヘッドの軸はロックされる。機械式ロック手段が、関節プローブヘッドの軸をロックするために設けられる。
 (もっと読む)
(もっと読む)
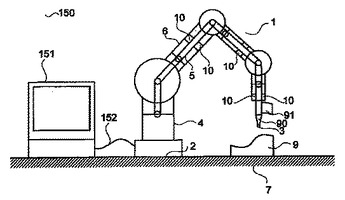
外骨格を有するCMMアーム
ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
 (もっと読む)
(もっと読む)
141 - 160 / 162
[ Back to top ]