
Fターム[2F069HH01]の内容
測定手段を特定しない測長装置 (16,435) | 測定器機 (1,161) | タッチプローブ (162)
Fターム[2F069HH01]に分類される特許
101 - 120 / 162
知的プローブ
本システム、方法、製品、ソフトウェア及び装置は知的プローブシステム又はその構成部分である。本発明のある実施形態では、1個又は複数個の可換なプローブ内にICチップを埋め込んであるので、CMM上でのプローブ換装を、何回でも、迅速に、容易に且つ誤りなく行うことができる。 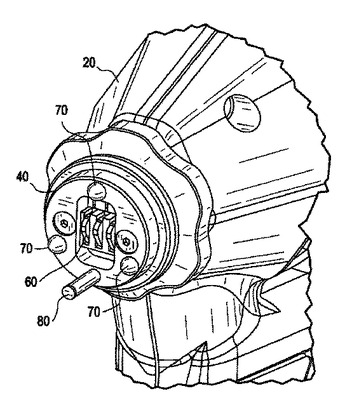 (もっと読む)
(もっと読む)
物体を測定するための方法
工作物(40)などの物体の寸法が公差に合致しているかどうかを決定するための「go、no−go」法について説明される。この方法は、座標測定機械、工作機械、旋盤などの測定装置に設置されたタッチトリガー、アナログ、または非接触プローブなどの測定プローブを使用する。この方法は、物体の公差に基づいた物体に対する経路の周囲で測定プローブを動かすステップを含む。物体に対する経路は、物体の最大公差に基づいた少なくとも1つの第1経路(46)と、物体の最小公差に基づいた第2経路(44)とを含んでよい。この方法は、測定プローブが経路の周囲で動かされる際、そのプローブによって取得されるあらゆるプローブ測定データを監視するステップと、測定プローブが経路の周囲で動かされる際、取得されるプローブ測定データの状態が変化する場合のみ物体の寸法が公差に合致していないことを示すステップと、をさらに含む。 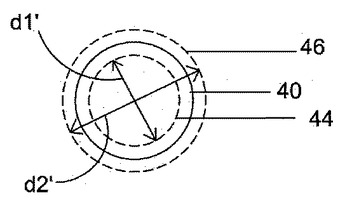 (もっと読む)
(もっと読む)
高速測定用の測定装置
高さ測定装置(1)は、垂直に移動可能な測定スライド(4)が、手動でも、クラッチ装置(15)を介した駆動モータ(14)を使用しても移動させることができるように取り付けられる測定コラム(3)を有する。測定スライド(4)は、駆動モータ(14)とクラッチ装置(15)とによって発生される一定の測定力を加工品の測定点に与える測定ヘッド(8)を有する。測定システム(19)は、測定ヘッド(8)の高さ座標を記録し、さらなる処理および評価のために、この高さ座標を制御装置(21)に送信する。制御装置(21)は、測定順序を自動化するための決定論理(33)を有する。上記決定論理は、ユーザが手動で行う特定の方向への測定ヘッド(8)の位置決めを自動的に検出し、次に、加工品を走査するために駆動モータ(14)を適切に駆動し、そして測定システム(19)からの信号を用いて、それぞれの測定に関連する一つまたは複数の測定値を決定する。オペレータが、所望の測定機能を独立して開始するために面でまたは孔でまたは軸で一方向にまたは逆方向に測定しようとすることを完全に自動的に検出するように、制御装置(21)を設定し得る。 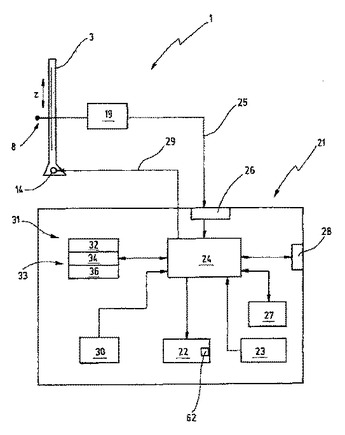 (もっと読む)
(もっと読む)
誤差補正の方法
座標計測機を使用する加工対象物測定値の誤差補正の方法であって、加工対象物を測定するステップと、所定の誤差関数、検索テーブルまたはマップから再現可能な測定誤差を決定するステップと、加工対象物が測定される際に、少なくとも加速度の関数を測定し、及び、再現不可能な測定誤差を計算するステップと、トータルの誤差を決定するために、再現可能及び再現不可能な誤差を結合するステップと、加工対象物の測定値を補正するために、トータルの誤差を使用するステップとを有する。 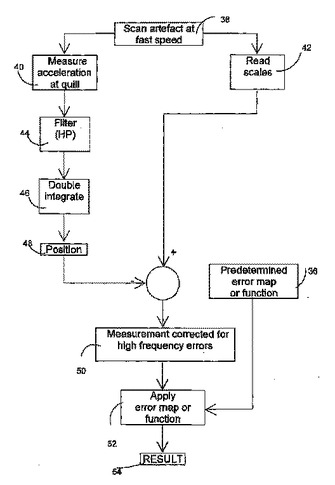 (もっと読む)
(もっと読む)
計測装置を位置決めするための、および、大きな物体を計測するための、方法、システムおよびコンピュータプログラム

大きな物体(650)の計測のために、計測アーム(604)が第1の位置(611)にある時に、計測アーム(604)の座標系内で既知の基準点を、光学的位置決めシステム(201,602,603)を使用することによって位置決めする。センサーを備えた計測アーム(604)の該センサーが、計測アームの異なるポジションの間で計測先端部がどのように動くかを知らせる。センサーを備えた計測アーム(604)は、第2の位置(621)へ移動され、第2の位置(621)において新たな基準点が位置決めされる。第2の位置においてもまた、センサーが、計測アームの異なるポジションの間で計測先端部がどのように動くかを知らせる。計測される点の位置を示す情報が、第1の基準点および第2の基準点の位置についての情報ならびに計測アームの各ポジションにおける計測先端部の位置を示す情報を使用することにより、共通座標系に変換される。 (もっと読む)
関節式プローブヘッド装置および方法
測定プローブ(12)を支持する関節式プローブヘッド(10)を含む、座標位置決め機用の装置が記載される。関節式プローブヘッド(10)は少なくとも1つの電動機(40、42)を含む。関節式プローブヘッド内において熱を発生させる加熱手段が提供される。この加熱手段は、電動機(40、42)または別個の加熱エレメントとすることができる。1つまたは複数の温度センサ(46、48)など、関節式プローブヘッド(10)の温度を決定する温度感知手段も提供される。この装置は、関節式プローブ(10)ヘッドの温度を制御することを可能にする。 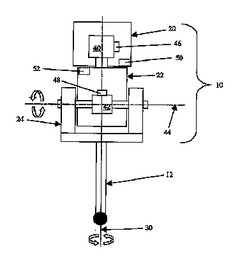 (もっと読む)
(もっと読む)
プローブ装置、プローブ装置の製造方法および触針式表面測定装置

【課題】試料表面の凹凸形状を検出する検出手段の光学的な位置合わせを簡便に行うこと。
【解決手段】触針式プローブ10は、X方向に延在する厚さが薄いレバー11と、レバー11の先端付近に設けられる−Z方向に先鋭化された探針12とを有し、レバー11の基部に設けられるスペーサー13を介してガラス基板20に固定され、レバー11とガラス基板20の間に、スペーサー13の厚さに相当するギャップGが形成されている。探針12を試料Sに接触させると、試料表面の凹凸形状に応じてレバー11が撓み、撓んだ部分のギャップGの間隔が変化する。レーザー光源4からの照明光をガラス基板20を通して触針式プローブ10へ照射すると、ギャップGに起因して干渉縞が現れ、その干渉縞のX方向の位置を顕微鏡2とCCDカメラ3で検出することにより、試料Sの表面の凹凸量を測定する。
(もっと読む)
座標測定機械及び座標測定機械を操作するための方法
本発明は、座標測定機械を操作するための方法及び座標測定機械に関し、この場合、少なくとも1つの電気モータMによって駆動される座標測定機械の座標測定装置、特に測定ヘッドは、少なくとも1つの方向に動くことが可能である。電気モータMの運動、このようにして、座標測定装置の運動を行うために、電気モータMを通して(ラインC11、C21の電流回路を介して)流れる駆動電流が測定される。電気モータMの運動又は座標測定装置5の運動が進行すべき目標速度に基づいて及び/又は目標加速度に基づいて、駆動電流について限界値が検出される(コンピュータPC及び/又はマイクロコントローラMCで)。駆動電流が検出された限界値IΤに達した場合及び/又は駆動電流が検出された限界値IΤを超えた場合、例えば、コンピュータPC又はマイクロコントローラMCが、電流回路に配置されたスイッチSW1、SW2の一方をオフにすることによって、座標測定装置5は所定の状態に設定される。  (もっと読む)
(もっと読む)
倣いプローブの校正方法
【課題】短時間でかつ高精度に倣いプローブの校正を行う倣いプローブの校正方法を提供する。
【解決手段】半径および中心座標値が既知の真球であるマスターボール7の表面を倣い測定する測定経路として第1測定経路71と第2測定経路72とを設定する(測定経路設定工程)。次に、測定経路設定工程において設定された第1測定経路71および第2測定経路72を倣い測定する(測定工程)。測定工程における倣いプローブの検出センサの出力値を測定経路71、72上の座標値と対比して、この検出センサの出力値を補正する補正データを算出する(補正データ算出工程)。ここで、測定経路設定工程にて設定される第1測定経路71および第2測定経路72は、マスターボール7の表面において螺旋形状である。そして、2つの測定経路71、72の起点711、721は赤道上において互いに90度ずれている。
(もっと読む)
測定対象物についての測定可能な変数を決定する装置
【課題】位置決めおよび測定精度に及ぼす工作物の重量の影響を低減する単純かつコスト効率の高い代案を提供する。
【解決手段】測定対象物30についての測定可能な変数を決定する装置は、複数の機械脚部38、42上に取り付けられた底板12を有している。測定ヘッド28は、底板に対して移動させることができる。工作物テーブル46は、測定対象物30を支持するために底板12上に設置することができる。本発明の一局面によれば、底板12は、垂直方向に調節することができるように機械脚部38、42に取り付けられている。機械脚部38、42は、工作物テーブル46を保持するために第1の調節位置で底板12から上方に突出している。第2の調節位置においては、機械脚部38、42は、底板12内に後退されている。
(もっと読む)
タッチプローブの接触検出方法及び装置
【課題】測定圧が低く、広い測定角度のタッチプローブの接触検出方法及び装置を提供。
【解決手段】一定の励起周波数(f)で正弦波振動させられた触針部5aと、触針部の振動波形を測定出力するセンサユニット7を有するタッチプローブの接触検出方法であって、センサユニットによって出力された振動波形を周波数分布に変換し、励起周波数の整数(n)倍の所定の高調波(n×f)の値があらかじめ定められた閾値以上となった時に、タッチプローブが被測定対象物に接触したと判定する。また、所定の高調波は励起周波数(f)の二倍の高調波(2×f)である。さらには、励起周波数(f)は触針部の固有振動数とは異なるようにする。
(もっと読む)
プローブ観察装置、表面性状測定装置
【課題】簡便な操作でプローブを高精度に観察できるプローブ観察装置を提供する。
【解決手段】プローブ210を撮像するカメラ230と、カメラ230にて取得した画像データを画像処理する画像処理部と、画像処理部にて画像処理された画像データを表示するモニタ400と、手動操作にて画像処理内容を入力指令するマウス500とを備える。画像処理部は、マウスにて入力される指令に応じて画像データを加工処理する画像データ加工処理部を備える。カメラ230は、低倍率のレンズ系を有し、プローブ210を視野内に入れた状態でプローブ210に対する相対位置が固定された状態で設けられている。
(もっと読む)
測定プローブ用の信号送信装置
タッチトリガー、または、アナログプローブなどの測定プローブ(12、110、250)が説明され、それは、振れ可能なスタイラス部(14)と、スタイラスの振れデータを遠隔プローブインターフェイス(20、104、254)に送信するための無線通信ユニット(18)とを含む。無線通信ユニット(18)は、スタイラスの振れデータ,および,プローブのアイデンティティコードを含むデジタルデータのパケットを送信するように配置される。無線通信ユニット(18)により、利用者によって前記プローブのアイデンティティコードが、設定可能とされる。測定プローブ(12、110、250)は、無線周波数(RF)のスペクトラム拡散リンク(106)で、関連するプローブインターフェイス(20、104、254)と通信し得る。  (もっと読む)
(もっと読む)
表面形状測定機
【課題】 プローブの他端を鏡面として、鏡面の位置変化を干渉計で検出する表面形状測定機において、プローブの振れを簡単な構造で検出可能にする。
【解決手段】 ステージ7と、ステージの移動位置を検出する検出器9,11と、第3の軸方向に移動可能な移動台22と、移動台に対して第3の軸方向に移動可能に保持され、一端が被測定物の表面に接触し、他端に鏡面34を有するプローブ25と、プローブの鏡面と基準平面との距離を検出する距離検出器とを備える表面形状測定機において、鏡面に斜めに入射する平行ビームを出射するビーム源35,36と、反射ビームを分割するビーム分割手段38と、分割されたビームの一方が入射される第1のビーム位置検出器39と、他方が入射される集束手段40と、集束ビームが入射される第2のビーム位置検出器41と、第1及び第2のビーム位置検出器の検出信号から、鏡面34の傾斜を検出する演算回路とを備える。
(もっと読む)
接触式プローブ
【課題】 接触式プローブによる形状測定において、測定物表面にゴミなどがあっても安定して走査可能なプローブを提供する。
【解決手段】 ハウジングに固定してプローブシャフトに力を加える事が可能な力発生手段を設け、ハウジングとプローブシャフトの間の変位や速度によってプローブシャフトに作用させる力を変化させる事で安定した走査を可能にする。すなわち、正常にトレースが行われている時は、弱いばね要素としての力をプローブシャフトに作用させ、ごみ等により跳ね上げられた時は、ばね要素の剛性を強める事で素早くプローブを測定面に戻すようにする。
(もっと読む)
多軸工作機械における旋回軸中心測定方法
【課題】正確な旋回軸中心を容易に測定可能であって、高精度な加工を実現させることのできる旋回軸中心測定方法を提供する。
【解決手段】まず、テーブル上の所定位置にマスター球25を設置するとともに、A軸の旋回軸中心をA(y0,z0)と仮定する。次に、テーブルをA軸周りに任意の旋回角度βだけ旋回させ、その傾斜状態(旋回角度β)においてマスター球25の中心C1(cy1,cz1)を求める。その後、さらにテーブルをA軸周りに所定角度αだけ旋回させて旋回角度γ(すなわち、γ=α+β)とし、その傾斜状態(旋回角度γ)においてマスター球25の中心C2(cy2,cz2)を求める。ここで、ベクトルAC1をα度回転させた直線がベクトルAC2となるため、旋回軸中心A(y0,z0)を演算により算出する。
(もっと読む)
三次元測定装置
【課題】 測定者の使い勝手を向上させると共に、再現性の高い測定を可能にする。
【解決手段】 被測定物200を測定するための測定プローブ101と、この測定プローブ101を三次元測定空間内で外部からの力に対して移動自在に支持すると共に前記測定プローブの位置を検出するための位置情報S1を出力する測定アーム100と、位置情報S1に基づいて測定プローブ101の三次元測定空間内の位置を検出するとともに、測定プローブ101の三次元測定空間内における移動を任意の線上又は面上に制限するように測定アーム100を制御する制御部300とを備える。
(もっと読む)
形状計測方法およびそのシステム
【課題】計測時間の短縮化を図ることを可能にするとともに、測定対象物の色や傾斜による制約を排除することのできる形状計測方法およびそのシステムを提供する。
【解決手段】撮像手段により測定対象物を撮影して得られた撮像データと上記測定対象物のCADデータとを比較照合することにより、上記測定対象物の位置・姿勢を推定して上記測定対象物の位置・姿勢推定データを取得し、上記取得した位置・姿勢推定データに基づいて、上記測定対象物における計測点間では接触式プローブを高速で移動させ、上記測定対象物が存在すると推定される位置の近傍に上記接触式プローブが到達すると減速を開始し、上記接触式プローブを低速で上記測定対象物に接触させ、上記接触式プローブが上記測定対象物に接触すると上記接触式プローブを停止させて計測を開始するようにした。
(もっと読む)
形状測定機
【課題】 被測定物の頂点位置を高精度かつ容易に検出することができる形状測定機を提供すること。
【解決手段】 被測定物Wの表面に触針センサ13を接触させた状態で、前記被測定物Wと前記触針センサ13とを相対的に走査させ、この走査の間の前記被測定物Wの測定したい高さ方向における前記触針センサ13の変位量により前記被測定物Wの表面形状を測定する形状測定機1であって、前記触針センサ13の前記高さ方向の変位量を測定する変位量測定手段と、この変位量測定手段からの出力信号に基づいてリサージュ波形を生成するリサージュ波形生成手段と、を備えることを特徴とする。
(もっと読む)
非接触式三次元形状計測方法及び計測機
【課題】接触式三次元形状計測機の3軸移動機構等を非接触式として利用できることに着眼して、非接触式位置センサを代わりに取付けて転用による非接触式三次元形状計測方法を提供する。
【解決手段】接触式三次元形状計測機の本来接触式プローブが取付けられるべきヘッド6の原点位置に対する非接触式位置センサ29の原点位置の原点較正データを予め作成しておき、駆動手段7x,7y,7zを駆動制御するように3軸移動機構8の移動範囲の移動始端位置及び移動終端位置を逐次指令し、ヘッド6の移動走査過程において非接触式位置センサ29に対して所定の繰返し周期でトリガー指令を行い、移動始端位置及び移動終端位置並びに繰返し周期ごとの移動位置で規定されるヘッド6の原点位置を原点較正データに対応して較正して非接触式位置センサ8の原点位置を求めて、この原点位置における非接触式位置センサ8の非接触検知位置データにより計測対象物である車両ボデー9の三次元形状データを作成する。
(もっと読む)
101 - 120 / 162
[ Back to top ]