
Fターム[2F069HH01]の内容
測定手段を特定しない測長装置 (16,435) | 測定器機 (1,161) | タッチプローブ (162)
Fターム[2F069HH01]に分類される特許
61 - 80 / 162
形状測定機、及び形状測定方法

【課題】被測定物の形状を適切に測定することができる形状測定機、及び形状測定方法の提供。
【解決手段】三次元測定機1は、被測定物に当接する測定子と、測定子を移動させるスライド機構24、及び駆動機構25と、スライド機構24、及び駆動機構25を制御するホストコンピュータ5とを備える。ホストコンピュータ5は、測定子の内部に設定された所定の点を仮測定点として仮測定点の位置を時系列で取得する仮測定点取得手段51と、仮測定点取得手段51にて取得された仮測定点の位置と、測定子の表面形状をモデル化した測定子モデルとに基づいて、測定点の位置を推定して取得する測定点推定手段52とを備える。測定点推定手段52は、対象モデル配置部521と、領域設定部522と、前後モデル配置部523と、範囲設定部524と、測定点取得部525とを備える。
(もっと読む)
機上測定システム

【課題】測定結果の測定精度の高い、ワークの3次元曲面形状を自動測定できる機上測定システムを提供する。
【解決手段】機上測定システム100は、3次元的にXYZ各軸方向に移動自在な主軸51を備えた工作機械50と、測定対象であるワークWの近傍に設置され、それ自体では動力を持たない複数の関節部16a、16b、16cと複数のアーム部15a、15b、15cを有するとともに、その先端部18に非接触式、または接触式の形状測定子9を設けられた多関節型アーム式測定器10と、主軸51に取り付けられ、形状測定子9がワークWに臨むように先端部18を主軸51に取り付ける結合部20と、結合部20の形状が反映させ、測定しようとするワークWの所望の箇所に形状測定子9を動かすように工作機械50を移動させる測定経路プログラムを具備した制御部を含み、ワークWを精度よく自動測定する。
(もっと読む)
面形状測定機、面形状測定方法、及び面形状の測定値の解析方法
【課題】軸を中心として回転対称な非球面部材における非球面の輪郭形状の測定において、軸を挟んだ対称な有効径の範囲全体を対象とすることなく、短い時間で輪郭形状の誤差を高精度に測定可能な面形状測定機、測定方法及び面形状の測定値の解析方法の提供。
【解決手段】軸を挟んだ非対称な範囲Mにおいて非球面の輪郭形状を測定し、軸を挟んだ対称な範囲Maにおける測定値と非球面の輪郭形状の設計値とを用いて所定の収束条件を満たすまで収束計算を行なう。次いで、範囲Mから範囲Maを除いた範囲Mbにおける収束計算後の測定値を、軸を挟んだ他方の側の範囲Cに軸対称に仮測定値として補完する。次いで、範囲Mと範囲Cとを合わせた範囲において、範囲Mにおける収束計算後の測定値と仮測定値と非球面の輪郭形状の設計値とを用いて所定の収束条件を満たすまで収束計算を行ない、非球面の輪郭形状の誤差を算出する。
(もっと読む)
プローブのアライメント調整方法および形状測定機
【課題】作業者の熟練度に左右されることなく、プローブの角度を能率的かつ高精度に調整することができるプローブのアライメント調整方法および形状測定機を提供。
【解決手段】軸部の先端に接触部を有するプローブと被測定物とを相対移動させるとともに、その相対移動方向に対して直交しかつ軸部と交差する方向からプローブの移動軌跡画像を撮像する工程ST2と、撮像されたプローブの移動軌跡画像から相対移動方向を示す基準直線L1および軸部の傾きを示すプローブ軸線L2を抽出する工程ST3と、抽出された基準直線L1に対するプローブ軸線L2の傾きを演算して求める工程ST4と、求められたプローブ軸線L2の傾きに基づいてプローブの傾きを調整する工程ST6とを備える。
(もっと読む)
直線案内機構および測定装置
【課題】長ストロークに対応しつつ、良好な直線性を確保できる直線案内機構および測定装置を提供する。
【解決手段】直線案内機構は、固定部材1と、移動部材2と、固定部材1と移動部材2との間に配置され移動部材2を移動可能に支持する第1の2重平行板ばね機構11Aおよび第2の2重平行板ばね機構12Aとを備える。第1の2重平行板ばね機構11Aおよび第2の2重平行板ばね機構12Aは、移動部材2の移動軸線を中心として180度以外の角度(例えば90度)で配置されている。
(もっと読む)
タービン発電機におけるステータコイルの接続組立の3次元形状測定方法及び3次元形状測定装置用冶具
【課題】 レーザ非接触式3次元形状測定装置と多関節接触式3次元形状測定装置を併用することで、表面形状を容易に高精度に測定することにある。
【解決手段】 タービン発電機におけるステータコイル接続組立の3次元形状を測定するに際して、レーザ非接触式3次元形状測定装置により予め設定された測定範囲におけるステータコイル接続組立の測定部位の3次元形状を測定する第1のステップ(S11)と、エンコーダが内蔵された関節により複数本のアームを連結してなる多関節接触式3次元形状測定装置により予め設定された測定範囲におけるステータコイル接続組立の測定部位の3次元形状を測定する第2のステップ(S12〜S14)と、前記第1の測定ステップで測定された3次元形状データと前記第2の測定ステップで測定された3次元形状データ及び手計測による局所的な部位の形状測定データを総合的に合成して最終的にステータコイル接続組立の設計図を起こす第3のステップ(S17,S18)とを備えている。
(もっと読む)
三次元形状測定装置
【課題】三次元形状測定装置において、単一の位置検出器で複数の複数の測定ミラーの変位を測定可能とする。
【解決手段】互いに平行なレーザービームが偏光ビームスプリッタ204の偏光面Eの異なる位置に入射する。一方のレーザービームは偏光面で2つに分岐して第1の測定ミラー4と参照ミラー6に入射する。他方のレーザービームは偏光面で2つに分岐して測定ミラー5と参照ミラー6に入射する。偏光ビームスプリッタ204と測定ミラー210,211の間には、測定ミラー210に向かうレーザービームを透過させ、測定ミラー211に向かうレーザービームを反射される部分反射ミラー214が配置されている。測定ミラー4,5と参照ミラー6で反射されたレーザービームの干渉から測定ミラー4,5の参照ミラー6に対する相対位置を算出する。
(もっと読む)
表裏面測定プローブ、表裏面測定装置および表裏面測定方法
【課題】被測定物の表裏面形状にかかわらず、1つのプローブで被測定物の表裏面を高精度に測定できる表裏面測定プローブ、表裏面測定装置および表裏面測定方法を提供する。
【解決手段】プローブ本体10と、両端に接触子22,23を有する検出軸20と、この検出軸20をプローブ本体10に対して検出軸20の軸方向へ移動可能に支持するガイド機構30と、検出軸20を軸方向へ移動させる駆動機構40と、検出軸20と同軸上において、検出軸20の移動位置を検出する位置検出手段50とを備える表裏面測定プローブ。
(もっと読む)
形状測定装置
【課題】複数の測定手段を備える形状測定装置において、各測定手段の測定範囲を広くする。
【解決手段】形状測定装置は、レーザプローブ17、画像プローブ18、タッチプローブ19の3種類のプローブを備えている。回転軸移動部13Bは、傾斜軸A1回りに回転自在に傾斜軸支持部13Aに支持されており、回転軸移動部13Bを傾斜軸A1回りに傾斜させることにより、回転テーブル13Cに設置されている被検物2を、各プローブに対して傾斜させることができる。各プローブは、各プローブの図内の左側面が、傾斜軸A1に対して略平行になるように配置されている。本発明は、例えば、形状測定装置に適用できる。
(もっと読む)
少なくとも1つの位置決め補助具を備える、飛行機の胴体セル構造の構造要素
本発明は、飛行機の胴体セル構造の構造要素(1)に関する。構造要素(1)はストリンガー構造(2)又は環状をなす前部品であってもよい。この構造要素(1)は複合材料から形成され、炭素繊維により強化されたエポキシ樹脂から形成してもよい。構造要素(1)は、測定システムを用いた位置特定を容易にする少なくとも1つの位置決め補助具(10,11)を備える。測定システムとしては、レーザー測定システム及び/又は触知型測定システム(22)が使用可能である。好適にはレーザー追跡器(19)であるレーザー測定システムの目標物として、位置決め補助具(10,11)に反射器(12)を間に間隙が生じないように装着することにより、他のコンポーネント(21)に対する構造要素(1)の空間位置を非接触にて極めて正確に測定することができる。この場合、距離に応じて、構造要素の空間位置を空間のあらゆる方向において最高500分の1ミリメートルの精度にて測定可能となる。構造要素(1)の位置特定及び配向完了後には、位置決め補助具(10,11)から反射器(12)を除去可能である。又は、触知型測定システム(22)の測定アーム(23)により構造要素(1)を測定することもできる。位置決め補助具(10,11)は、例えば機械的方法により、構造要素(1)から残留物を残すことなく短時間で除去することができる。本発明による構造要素(1)を使用することにより、空間において正確に配置される複数の構造要素からなる複雑な繊維複合材コンポーネントの製造コストが著しく低減される。 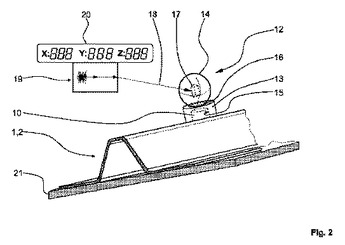 (もっと読む)
(もっと読む)
形状測定プローブ
【課題】接触子の押し付け力を原子間力に相当する微小力(例えば30mgf以下)に設定でき、被測定物の傷を防止し、面粗さ等の微細な形状測定ができ、測定面のうねりに追従でき、プローブのオーバーランによる接触子等の損傷を防止できる形状測定プローブを提供する。
【解決手段】被測定物の上面に沿って移動可能なプローブ本体10と、下端に設けられた接触子12aと接触子から上方に鉛直に延びる円筒形中間軸12bとその上端に設けられ中間軸より最大径が大きい鍔部12cとを有するスタイラス12と、プローブ本体の下端に取り付けられスタイラス12を鉛直にのみ移動可能にガイドするスタイラスホルダ14と、スタイラスホルダの上面と鍔部の下面の間に挟持され鍔部を上方に付勢する円板状の自重軽減バネ16と、プローブ本体に取り付けられ鍔部上面の変位を検出する位置検出センサ18(レーザーセンサ)とを備える。
(もっと読む)
形状測定装置
【課題】貫通孔を有するワークを、貫通孔が所定軸方向に平行となるように、短時間で載置可能に構成された形状測定装置を提供する。
【解決手段】形状測定装置は、貫通孔12aを有するワーク12を載置可能に構成され且つX軸及びY軸に回転可能に構成された回転テーブル13a、貫通孔12aの一方側からZ軸に平行に光を照射する光源13b、貫通孔12aの他方側に配置され且つ貫通孔12aを通過した光源13bからの光を受光してその受光した光に基づく輝度を測定するCCDカメラ18a、回転テーブル13aによるワーク12の回転角度をCCDカメラ18aにて測定された輝度に基づき制御する制御部35を備える。制御部35は、回転テーブル13aによりワーク12を所定角度ずつ回転させる毎に、CCDカメラ18aにより輝度を測定させ、その輝度が最大となる角度に回転テーブル13aの回転角度を設定する。
(もっと読む)
座標測定システムのための方法
本発明は、対象物の特徴形状を測定するための方法であって、少なくとも特徴形状の表象を、少なくとも特徴形状の表面測定を介して複数のデータ点を取得することによって対象物上で得ることを含む方法に関する。対象物の少なくとも特徴形状をほぼ複製するモデルが、表象に適合される。モデルは、共通点で連結される少なくとも2つの独立的に可変の部分を定義するパラメータを含む。適合させることは、少なくとも2つの独立的に可変の部分の少なくとも1つを変えることによってモデルの形態を変更することを含む。方法はまた、少なくとも特徴形状に関する情報を適合されたモデルから得ることも含む。 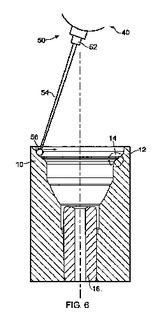 (もっと読む)
(もっと読む)
産業機械
【課題】目標位置の変化速度、及び補正に起因する追従誤差を抑制することができる制御装置を備える産業機械の提供。
【解決手段】三次元測定機1は、被測定物を測定するための測定子を移動させる移動機構2と、移動機構2を制御することで測定子の位置を位置指令値に追従させる制御装置3とを備える。制御装置3は、移動機構2にて移動される測定子の位置を検出する位置検出部31と、位置検出部31による検出位置を補正する補正部32と、補正部32にて補正された検出位置の位置指令値に対する偏差に基づいて、測定子の位置を制御する位置制御部33と、位値指令値に基づいて、移動機構2をフィードフォワード制御する位置フィードフォワード制御部34と、補正部32による検出位置の補正量に基づいて、移動機構2をフィードフォワード制御する補正量フィードフォワード制御部35とを備える。
(もっと読む)
保管装置及び同保管装置を備えた計測装置
【課題】オイルミストや塵などの付着から不使用時にある検出手段を保護して測定精度の悪化を防止する保管装置を提供すること。
【解決手段】被検物Mの形状情報を採取するための検出手段(非接触センサ20a、タッチプローブ20b)をその不使用時に保管する保管装置であって、前記不使用時の検出手段をその周囲の雰囲気から隔てる保護手段(プローブボックス30,エアーポンプ40)と、保護手段に供給されるクリーンエアーの浄化を行う集塵手段44を備える。
(もっと読む)
カムプロファイル測定装置
【課題】安価で、しかも、複数種のカムのプロファイルを高精度に測定できるカムプロファイル測定装置を提供する。
【解決手段】カム1のプロファイルを測定するカムプロファイル測定装置。カム1を回転させる回転機構20と、カム1の回転角度を検出する回転角度検出手段30と、カム1のカムフォロア当接位置に当接され、カム1が回転することにより所定方向へ移動するプローブ40と、このプローブ40を所定方向に沿って案内する案内機構50と、プローブ40の移動位置を検出する位置検出手段60と、を備える。
(もっと読む)
測定装置
【課題】長尺の断面直線形状や面形状の測定における水準器と多点法の利点だけを有効に使い、大面積の被測定面を迅速に高精度に測定できる測定装置を提供する。
【解決手段】被測定試料の置かれたステージと多点法プローブを保持するセンサホルダが互いに相対的に移動をして直線形状を走査測定する装置において、移動する側のセンサホルダまたはステージの走査方向の傾斜角を測定することの出来る水準器を備えていて、前記水準器によって走査移動の開始点と終了点での前記移動側物体の傾斜を測定することで、多点法プローブのゼロ点調整誤差をその場校正する。
(もっと読む)
形状測定装置
【課題】複数台の測定機間での振動の影響を排除した上で高い操作性と測定精度を実現した新たな形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物50を挟んで対向配置される少なくとも2台の駆動機構付き測定機CMM1,CMM2と、これらの測定機ごとにそれぞれ対応して接続される少なくとも2台の制御装置41,42と、を備えるものであって、前記制御装置41,42は、測定機CMM1,CMM2の動作状態を検出自在であるとともに、制御装置41,42ごとで連携を取り合うことにより、一の測定機CMM1の動作状態の検出結果に応じて他の測定機CMM2に対する動作指令を発信自在である。
(もっと読む)
形状測定装置
【課題】高い操作性を有する新たな形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物60を挟んで対向配置される少なくとも2台の駆動機構付き測定機CMM1,CMM2と、これらの測定機ごとにそれぞれ対応して接続される少なくとも2台の操作コントローラ51,52と、を備えるものである。そして、操作コントローラ51,52のそれぞれは、非接続の測定機CMM2,CMM1を含むすべての測定機を操作可能に構成されている。また、操作コントローラ51,52は、切替ボタン53,54を有しており、この切替ボタンを切り替えることによって操作対象となる測定機を選択可能となっている。
(もっと読む)
ワークモデル生成方法、及びそのプログラム
【課題】演算時間の浪費を抑制し、且つ演算エラーを抑制したワークモデル生成方法、及びそのプログラムを提供する。
【解決手段】ワークモデル生成方法は、削り刃によって切削する経路を示す切削経路の外郭部である外郭切削経路を特定する外郭切削経路特定ステップと、外郭切削経路にて囲まれる面を含んで構成される所定厚みの切削ワークモデルを原ワークモデルから削除して加工ワークモデルを生成する加工ワークモデル生成ステップとを備える。このように、外郭切削経路にて囲まれる切削ワークモデルを原ワークモデルから削除して加工ワークモデルを生成するので、切削経路全体について切削ワークモデルを生成する必要がなく、演算時間の遅延を抑制することができる。
(もっと読む)
61 - 80 / 162
[ Back to top ]